

infoPLC++ Numero 4
Cuarta entrega del Magazine infoPLC++ centrada en la robótica y maquinaria coincidiendo con Metal Madrid
Cuarta entrega del Magazine infoPLC++ centrada en la robótica y maquinaria coincidiendo con Metal Madrid

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
trends<br />
especial robótica y maquinaria<br />
Robótica open: la convergencia entre<br />
motion control y robótica clásica<br />
“Especialmente en la tecnología necesitamos cambios revolucionarios, no cambios<br />
incrementales”. Esta frase citada por uno de los creadores de Google, Larry Page,<br />
nos puede hacer entender el porqué de la verdadera ‘robótica open’ y los beneficios<br />
que conlleva con respecto a sus predecesores: la robótica clásica y el motion control.<br />
ROCÍO ROYO, INTRA AUTOMATION<br />
Motion control y robótica clásica<br />
llevan conviviendo varias décadas<br />
de forma paralela y han ido<br />
evolucionando de forma drástica<br />
desde sus inicios. Los avances en ambos han<br />
permitido el advenimiento del concepto de<br />
la ‘robótica open’. Pero, ¿qué es realmente<br />
la ‘robótica open’? ¿Qué diferencias existen<br />
entre sus predecesores? ¿Con que alternativas<br />
contamos para implantar esta tendencia en<br />
nuestras fábricas?<br />
Para poder responder a todas estas cuestiones<br />
y clarificar este nuevo concepto es necesario<br />
explicar cual ha sido la evolución de estos en el<br />
sector industrial.<br />
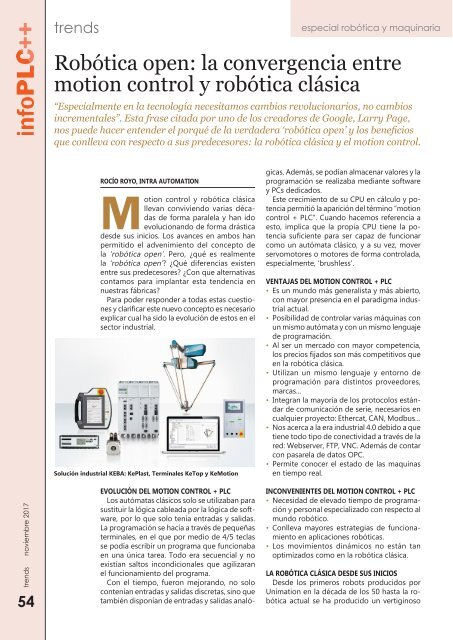
Solución industrial KEBA: KePlast, Terminales KeTop y KeMotion<br />
EVOLUCIÓN DEL MOTION CONTROL + PLC<br />
Los autómatas clásicos solo se utilizaban para<br />
sustituir la lógica cableada por la lógica de software,<br />
por lo que solo tenía entradas y salidas.<br />
La programación se hacía a través de pequeñas<br />
terminales, en el que por medio de 4/5 teclas<br />
se podía escribir un programa que funcionaba<br />
en una única tarea. Todo era secuencial y no<br />
existían saltos incondicionales que agilizaran<br />
el funcionamiento del programa.<br />
Con el tiempo, fueron mejorando, no solo<br />
contenían entradas y salidas discretas, sino que<br />
también disponían de entradas y salidas analógicas.<br />
Además, se podían almacenar valores y la<br />
programación se realizaba mediante software<br />
y PCs dedicados.<br />
Este crecimiento de su CPU en cálculo y potencia<br />
permitió la aparición del término “motion<br />
control + PLC”. Cuando hacemos referencia a<br />
esto, implica que la propia CPU tiene la potencia<br />
suficiente para ser capaz de funcionar<br />
como un autómata clásico, y a su vez, mover<br />
servomotores o motores de forma controlada,<br />
especialmente, ‘brushless’.<br />
VENTAJAS DEL MOTION CONTROL + PLC<br />
• Es un mundo más generalista y más abierto,<br />
con mayor presencia en el paradigma industrial<br />
actual.<br />
• Posibilidad de controlar varias máquinas con<br />
un mismo autómata y con un mismo lenguaje<br />
de programación.<br />
• Al ser un mercado con mayor competencia,<br />
los precios fijados son más competitivos que<br />
en la robótica clásica.<br />
• Utilizan un mismo lenguaje y entorno de<br />
programación para distintos proveedores,<br />
marcas...<br />
• Integran la mayoría de los protocolos estándar<br />
de comunicación de serie, necesarios en<br />
cualquier proyecto: Ethercat, CAN, Modbus…<br />
• Nos acerca a la era industrial 4.0 debido a que<br />
tiene todo tipo de conectividad a través de la<br />
red: Webserver, FTP, VNC. Además de contar<br />
con pasarela de datos OPC.<br />
• Permite conocer el estado de las maquinas<br />
en tiempo real.<br />
trends noviembre 2017<br />
54<br />
INCONVENIENTES DEL MOTION CONTROL + PLC<br />
• Necesidad de elevado tiempo de programación<br />
y personal especializado con respecto al<br />
mundo robótico.<br />
• Conlleva mayores estrategias de funcionamiento<br />
en aplicaciones robóticas.<br />
• Los movimientos dinámicos no están tan<br />
optimizados como en la robótica clásica.<br />
LA ROBÓTICA CLÁSICA DESDE SUS INICIOS<br />
Desde los primeros robots producidos por<br />
Unimation en la década de los 50 hasta la robótica<br />
actual se ha producido un vertiginoso














