

infoPLC++ Numero 5
Analizamos las perspectivas y las tendencias tecnológicas que marcarán el año la mano de analistas y expertos industriales.
Analizamos las perspectivas y las tendencias tecnológicas que marcarán el año la mano de analistas y expertos industriales.

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
trends<br />
SOA<br />
La arquitectura orientada a servicios se desarrolló<br />
inicialmente para informática de propósito<br />
general, siendo los ‘webservices’ la forma más<br />
extendida de implementarla. Se está utilizando<br />
cada vez más en el ámbito de la automatización<br />
industrial, especialmente debido a la creciente<br />
importancia de los sistemas de medición y<br />
control distribuidos, la Internet de las cosas y<br />
las infraestructuras de redes de sensores inalámbricos.<br />
SISTEMAS CIBERFÍSICOS<br />
RAMI 4.0 (Reference Architectura Model Industry<br />
4.0) se especificó inicialmente como norma<br />
DIN 91345 en 2016, y en 2017 se convirtió en<br />
el estándar IEC / PAS 63088.<br />
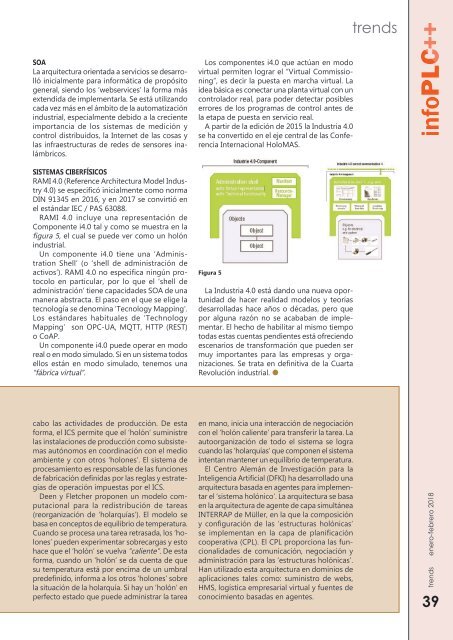
RAMI 4.0 incluye una representación de<br />
Componente i4.0 tal y como se muestra en la<br />
figura 5, el cual se puede ver como un holón<br />
industrial.<br />
Un componente i4.0 tiene una ‘Administration<br />
Shell’ (o ‘shell de administración de<br />
activos’). RAMI 4.0 no especifica ningún protocolo<br />
en particular, por lo que el ‘shell de<br />
administración’ tiene capacidades SOA de una<br />
manera abstracta. El paso en el que se elige la<br />
tecnología se denomina ‘Tecnology Mapping’.<br />
Los estándares habituales de ‘Technology<br />
Mapping’ son OPC-UA, MQTT, HTTP (REST)<br />
o CoAP.<br />
Un componente i4.0 puede operar en modo<br />
real o en modo simulado. Si en un sistema todos<br />
ellos están en modo simulado, tenemos una<br />
“fábrica virtual”.<br />
Los componentes i4.0 que actúan en modo<br />
virtual permiten lograr el “Virtual Commissioning”,<br />
es decir la puesta en marcha virtual. La<br />
idea básica es conectar una planta virtual con un<br />
controlador real, para poder detectar posibles<br />
errores de los programas de control antes de<br />
la etapa de puesta en servicio real.<br />
A partir de la edición de 2015 la Industria 4.0<br />
se ha convertido en el eje central de las Conferencia<br />
Internacional HoloMAS.<br />
Figura 5<br />
La Industria 4.0 está dando una nueva oportunidad<br />
de hacer realidad modelos y teorías<br />
desarrolladas hace años o décadas, pero que<br />
por alguna razón no se acababan de implementar.<br />
El hecho de habilitar al mismo tiempo<br />
todas estas cuentas pendientes está ofreciendo<br />
escenarios de transformación que pueden ser<br />
muy importantes para las empresas y organizaciones.<br />
Se trata en definitiva de la Cuarta<br />
Revolución industrial. •<br />
cabo las actividades de producción. De esta<br />
forma, el ICS permite que el ‘holón’ suministre<br />
las instalaciones de producción como subsistemas<br />
autónomos en coordinación con el medio<br />
ambiente y con otros ‘holones’. El sistema de<br />
procesamiento es responsable de las funciones<br />
de fabricación definidas por las reglas y estrategias<br />
de operación impuestas por el ICS.<br />
Deen y Fletcher proponen un modelo computacional<br />
para la redistribución de tareas<br />
(reorganización de ‘holarquías’). El modelo se<br />
basa en conceptos de equilibrio de temperatura.<br />
Cuando se procesa una tarea retrasada, los ‘holones’<br />
pueden experimentar sobrecargas y esto<br />
hace que el ‘holón’ se vuelva “caliente”. De esta<br />
forma, cuando un ‘holón’ se da cuenta de que<br />
su temperatura está por encima de un umbral<br />
predefinido, informa a los otros ‘holones’ sobre<br />
la situación de la holarquía. Si hay un ‘holón’ en<br />
perfecto estado que puede administrar la tarea<br />
en mano, inicia una interacción de negociación<br />
con el ‘holón caliente’ para transferir la tarea. La<br />
autoorganización de todo el sistema se logra<br />
cuando las ‘holarquías’ que componen el sistema<br />
intentan mantener un equilibrio de temperatura.<br />
El Centro Alemán de Investigación para la<br />
Inteligencia Artificial (DFKI) ha desarrollado una<br />
arquitectura basada en agentes para implementar<br />
el ‘sistema holónico’. La arquitectura se basa<br />
en la arquitectura de agente de capa simultánea<br />
INTERRAP de Müller, en la que la composición<br />
y configuración de las ‘estructuras holónicas’<br />
se implementan en la capa de planificación<br />
cooperativa (CPL). El CPL proporciona las funcionalidades<br />
de comunicación, negociación y<br />
administración para las ‘estructuras holónicas’.<br />
Han utilizado esta arquitectura en dominios de<br />
aplicaciones tales como: suministro de webs,<br />
HMS, logística empresarial virtual y fuentes de<br />
conocimiento basadas en agentes.<br />
trends enero-febrero 2018<br />
39














