Théorie de Lyapunov, commande robuste et ... - LAAS CNRS
Théorie de Lyapunov, commande robuste et ... - LAAS CNRS
Théorie de Lyapunov, commande robuste et ... - LAAS CNRS

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
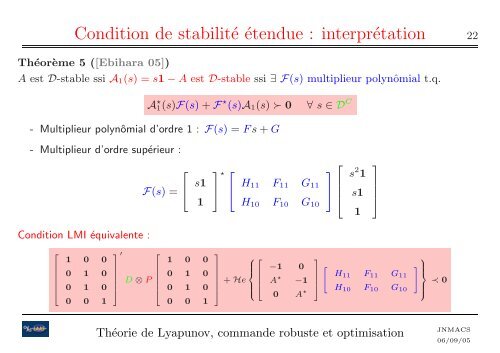
Condition <strong>de</strong> stabilité étendue : interprétation 22<br />
Théorème 5 ([Ebihara 05])<br />
A est D-stable ssi A 1 (s) =s1 − A est D-stable ssi ∃ F(s) multiplieur polynômial t.q.<br />
A ⋆ 1(s)F(s) + F ⋆ (s)A 1 (s) ≻ 0<br />
∀ s ∈ D C<br />
- Multiplieur polynômial d’ordre 1 : F(s) = F s + G<br />
- Multiplieur d’ordre supérieur :<br />
⎡<br />
F(s) = ⎣ s1 1<br />
⎤<br />
⎦<br />
⎡<br />
⎤<br />
⎣ H 11 F 11 G 11<br />
⎦ ⎢<br />
⎣<br />
H 10 F 10 G 10<br />
⋆ ⎡<br />
s 2 1<br />
s1<br />
1<br />
⎤<br />
⎥<br />
⎦<br />
Condition LMI équivalente :<br />
⎡<br />
⎢<br />
⎣<br />
1 0 0<br />
0 1 0<br />
0 1 0<br />
0 0 1<br />
⎤<br />
′<br />
⎥ D ⊗ P<br />
⎦<br />
⎡<br />
⎢<br />
⎣<br />
1 0 0<br />
0 1 0<br />
0 1 0<br />
0 0 1<br />
⎤<br />
⎡<br />
⎧⎪ ⎨ ⎥<br />
⎦ + He ⎢<br />
⎣<br />
⎪ ⎩<br />
⎤<br />
−1 0<br />
A ⋆ −1 ⎥<br />
⎦<br />
0 A ⋆<br />
[<br />
H11 F 11 G 11<br />
H 10 F 10 G 10<br />
] ⎫ ⎪ ⎬<br />
⎪ ⎭<br />
≺ 0<br />
<strong>Théorie</strong> <strong>de</strong> <strong>Lyapunov</strong>, comman<strong>de</strong> <strong>robuste</strong> <strong>et</strong> optimisation<br />
JNMACS<br />
06/09/05