la correction du devoir 5 - IUFM de Toulouse
la correction du devoir 5 - IUFM de Toulouse
la correction du devoir 5 - IUFM de Toulouse

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
Référence K 5446 CO5 Page 1<br />
Correction <strong>du</strong> <strong><strong>de</strong>voir</strong> N°5<br />
Sommaire<br />
1 RECHERCHE D’UN MODÈLE MATHÉMATIQUE DE LA FONCTION FP7 EN MODE<br />
ASSERVISSEMENT DE VITESSE.......................................................................................................... 4<br />
1.1 EBAUCHE DU SCHÉMA BLOC. ......................................................................................................... 4<br />
1.2 MODÉLISATION DES BLOCS DE L’ASSERVISSEMENT « À TEMPS CONTINU ». ..................................... 4<br />
1.2.1 Recherche Des éléments <strong>du</strong> modèle électromécanique . .................................................... 4<br />
1.2.2 Modélisation <strong>de</strong> <strong>la</strong> fonction F.S.72 « Création <strong>de</strong> <strong>la</strong> consigne <strong>de</strong> courant »......................... 6<br />
1.3 MODÉLISATION DES BLOCS « À TEMPS DISCRET ». ....................................................................... 10<br />
1.3.1 Modélisation <strong>de</strong> <strong>la</strong> structure remplissant <strong>la</strong> fonction « calcul <strong>de</strong> <strong>la</strong> viteSSE » .................... 10<br />
1.3.2 Analyse <strong>de</strong> <strong>la</strong> re<strong>la</strong>tion NVM(NT E ) = K P .[ Profon<strong>de</strong>ur(NT E ) - Profon<strong>de</strong>ur[(N-1)T E ]]............... 11<br />
1.3.3 Complément théorique : Modélisation <strong>de</strong> l’influence <strong>de</strong> l’échantillonnage et <strong>du</strong> blocage. .. 16<br />
1.4 SYNTHÈSE DE LA RECHERCHE D’UN MODÉLE ANALOGIQUE DE LA BOUCLE D’ASSERVISSEMENT DE<br />
VITESSE............................................................................................................................................... 17<br />
2 ETUDE DE L’ASSERVISSEMENT DE VITESSE ÉCHANTILLONNÉ À PARTIR D’UN<br />
ÉQUIVALENT ANALOGIQUE. .............................................................................................................. 19<br />
2.1 ETUDE DE LA RÉPONSE À UN ÉCHELON ........................................................................................ 19<br />
2.2 ETUDE DE LA STABILITÉ DE LA BOUCLE ........................................................................................ 21<br />
3 ETUDE DU FONCTIONNEMENT EN MODE ASSERVISSEMENT DE POSITION. ........................ 23<br />
Agnès FOUCHER - Christian VALADE<br />
09/98
Page 2 Référence K 5446 C05<br />
Table <strong>de</strong>s illustations<br />
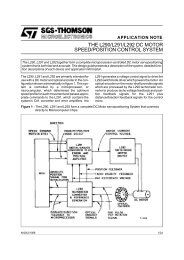
Figure 1. Représentation <strong>de</strong> <strong>la</strong> chaîne complète en mo<strong>de</strong> asservissement <strong>de</strong> vitesse avec I m le courant<br />
dans le moteur et m le couple moteur développé sur l'axe <strong>du</strong> moteur. _________________________ 4<br />
Figure 2. Exemple d’évolution <strong>de</strong> <strong>la</strong> profon<strong>de</strong>ur et <strong>de</strong> <strong>la</strong> vitesse. _____________________________ 12<br />
Figure 3. Représentation <strong>de</strong>s échantillons NVM(nTe) (gros points), <strong>de</strong> NVMfictif(t) (pointillés) et <strong>de</strong> <strong>la</strong><br />
vitesse réelle. ____________________________________________________________________ 14<br />
Figure 4. Interprétation <strong>de</strong> <strong>la</strong> fonction <strong>de</strong> transfert T*(j )___________________________________ 14<br />
Figure 5. Approximation analogique équivalent <strong>de</strong> l’échantillonnage et <strong>du</strong> blocage en présence d’un<br />
filtre passe bas après le bloqueur. ____________________________________________________ 17<br />
Figure 6. Modèle analogique équivalent <strong>du</strong> traitement numérique, <strong>de</strong> l’échantillonnage et <strong>du</strong> blocage.<br />
Avec k = Kp=120/0,848 et k.Te= Kv=1mm/s. ____________________________________________ 18<br />
Figure 7. Modèle analogique <strong>de</strong> l’asservissement <strong>de</strong> vitesse. Domaine <strong>de</strong> validité [0, Fe/4] environ. Pas<br />
<strong>de</strong> frottements secs; _______________________________________________________________ 18<br />
Figure 8. Variante <strong>du</strong> modèle analogique <strong>de</strong> l’asservissement <strong>de</strong> vitesse ______________________ 19<br />
CENTRE NATIONAL D’ENSEIGNEMENT A DISTANCE DE VANVES<br />
09/98
Référence K 5446 CO5 Page 3<br />
AVERTISSEMENT<br />
Ce <strong><strong>de</strong>voir</strong> vous permet,<br />
d’étudier <strong>la</strong> conversion numérique analogique<br />
<strong>de</strong> rechercher le modèle mathématique <strong>de</strong> l’asservissement lorsque l’on est en mo<strong>de</strong><br />
asservissement <strong>de</strong> vitesse,<br />
d’analyser <strong>la</strong> stabilité <strong>de</strong> cet asservissement échantillonné en utilisant l’approximation <strong>du</strong><br />
retard pur,<br />
<strong>de</strong> rechercher le modèle <strong>de</strong> l’asservissement lorsque l’on est en mo<strong>de</strong> asservissement<br />
<strong>de</strong> position.<br />
Agnès FOUCHER - Christian VALADE<br />
09/98
Page 4 Référence K 5446 C05<br />
CENTRE NATIONAL D’ENSEIGNEMENT A DISTANCE DE VANVES<br />
09/98
Référence K 5446 CO5 Page 5<br />
1.1 EBAUCHE DU SCHEMA BLOC.<br />
Lorsque l’on est en mo<strong>de</strong> asservissement <strong>de</strong> vitesse, le système peut se mettre sous<br />
<strong>la</strong> forme <strong>de</strong>s schéma-bloc donnés sur <strong>la</strong> Figure 1. Les interrupteurs schématisent <strong>la</strong><br />
présence <strong>de</strong> gran<strong>de</strong>urs qui correspon<strong>de</strong>nt à <strong>de</strong>s échantillons et qui ne sont donc pas définis<br />
pour toutes les valeurs <strong>de</strong> t.<br />
Un élément est dit « à temps continu » lorsque les signaux traités sont définis quelque<br />
soit t . Si le système est linéaire, il peut être étudié à l’ai<strong>de</strong> <strong>de</strong> <strong>la</strong> transformée en p.<br />
Par opposition, on parle d’élément « à temps discret »pour les systèmes qui traitent<br />
<strong>de</strong>s échantillons et pour lesquels les signaux ne sont définis qu’aux dates<br />
d’échantillonnage. L’outil mathématique est alors <strong>la</strong> transformée en z.<br />
NVC<br />
NVM<br />
Bloqueur<br />
Calcul<br />
Numérique<br />
NEV<br />
Vic<br />
POSREL<br />
Codage<br />
I m<br />
H1(p)<br />
m<br />
H3(p)<br />
Profon<strong>de</strong>ur (mm)<br />
H2(p)<br />
Vitesse (mm/s)<br />
Vitesse<br />
(mm/s)<br />
Figure 1. Représentation <strong>de</strong> <strong>la</strong> chaîne complète en mo<strong>de</strong> asservissement <strong>de</strong> vitesse avec I m le<br />
courant dans le moteur et m le couple moteur développé sur l'axe <strong>du</strong> moteur.<br />
1.2 MODELISATION DES BLOCS DE L’ASSERVISSEMENT « A TEMPS CONTINU ».<br />
La re<strong>la</strong>tion entre le courant dans le moteur et <strong>la</strong> différence <strong>de</strong> potentiel Vic est fournie<br />
par l’analyse <strong>de</strong> <strong>la</strong> fonction FS.7.3 (contrôle <strong>du</strong> transfert d’énergie dans le moteur), elle a<br />
été établie dans un <strong><strong>de</strong>voir</strong> précé<strong>de</strong>nt. On <strong>la</strong> considérera comme équivalente à un premier<br />
ordre.<br />
On rappelle qu’un courant repéré négatif dans le moteur entraîne le moteur dans le<br />
sens <strong>de</strong> <strong>la</strong> <strong>de</strong>scente <strong>du</strong> moulinet.<br />
Le moment d’inertie J <strong>de</strong> <strong>la</strong> chaîne cinématique ramené sur l’arbre <strong>du</strong> moteur dépend<br />
<strong>du</strong> moulinet, on le supposera égal à 1,5.10 -5 kg;m². Le couple <strong>de</strong> frottement visqueux fv est<br />
évalué à 10 -4 N.m/s.<br />
1.2.1 Recherche Des éléments <strong>du</strong> modèle électromécanique .<br />
Les fonctions <strong>de</strong> transfert H1, H2, H3 correspon<strong>de</strong>nt au modèle électromécanique <strong>du</strong><br />
moteur et <strong>de</strong> <strong>la</strong> partie mécanique associée. I m représente le courant dans le moteur exprimé<br />
en A et m le couple moteur développé sur l'axe <strong>du</strong> moteur. Profon<strong>de</strong>ur représente <strong>la</strong><br />
position <strong>du</strong> moulinet par rapport à <strong>la</strong> surface <strong>de</strong> l'eau et est exprimé en mm.<br />
Agnès FOUCHER - Christian VALADE<br />
09/98
Page 6 Référence K 5446 C05<br />
Q1) Préciser les expressions <strong>de</strong>s fonctions <strong>de</strong> transfert H1(p), H2(p), H3(p) en fonction<br />
<strong>de</strong> <strong>la</strong> constante <strong>de</strong> couple Km, <strong>du</strong> moment d’inertie J, <strong>du</strong> coefficient <strong>de</strong><br />
frottement visqueux fv et <strong>du</strong> pas mécanique K6 (en mm/rd).<br />
La vitesse <strong>de</strong> remontée <strong>du</strong> moulinet en mm/s vérifie V(p) = 0,848. m(p) avec m <strong>la</strong><br />
vitesse <strong>de</strong> rotation <strong>de</strong> l’axe <strong>du</strong> moteur en rd/s.<br />
D’autre part, le couple moteur est proportionnel au courant dans le moteur avec<br />
Km = 20 m N.m/A d’après <strong>la</strong> documentation <strong>du</strong> moteur Escap.<br />
Le moteur est branché <strong>de</strong> manière à ce que pour Vic négatif et donc un courant dans<br />
le moteur Im négatif, <strong>la</strong> rotation entraîne une <strong>de</strong>scente <strong>du</strong> moulinet, or c’est le sens<br />
<strong>de</strong>scente qui a été mécaniquement considéré comme positif. Donc on écrira,<br />
m(p) = - K m .I m (p) soit H 1 (p)= - K m<br />
Les re<strong>la</strong>tions mécaniques nous donnent,<br />
m(t) = J.d m (t)/dt + fv. m(t)+ frottements secs.<br />
ou encore<br />
m(p) = (J.p +fv)<br />
m(p) + Frot secs (p).<br />
donc m(p)/ [ m(p) - Frot secs (p)] = 1/(J p +fv) si m(p) est <strong>la</strong> vitesse <strong>de</strong> rotation <strong>de</strong><br />
l’axe <strong>du</strong> moteur exprimée en rd/s.<br />
Si on considère <strong>la</strong> vitesse linéaire <strong>de</strong> trans<strong>la</strong>tion <strong>du</strong> moulinet exprimée en mm/s<br />
La vitesse <strong>de</strong> dép<strong>la</strong>cement linéaire <strong>du</strong> moulinet en mm/s est reliée à<br />
V(p) = 0,848 m(p)/ (2<br />
m par<br />
Donc, H2(p) = 0,848 / (2<br />
(J p +fv)<br />
Le pas est égal à 0.848 mm/tour ou encore K6 = 0.848/2 mm/rd<br />
La profon<strong>de</strong>ur est <strong>la</strong> dérivée <strong>de</strong> <strong>la</strong> vitesse, donc Profon<strong>de</strong>ur(p) V(p) /p si <strong>la</strong><br />
profon<strong>de</strong>ur est exprimée en mm, on obtient H 3 (p) = 1 p<br />
-Frott secs (p)<br />
NEV<br />
Vic<br />
I m<br />
- K m<br />
1<br />
p<br />
m<br />
+<br />
K 6<br />
+<br />
Jp f<br />
v<br />
Vitesse<br />
(mm/s)<br />
Profon<strong>de</strong>ur (mm)<br />
Vitesse(mm/s)<br />
CENTRE NATIONAL D’ENSEIGNEMENT A DISTANCE DE VANVES<br />
09/98
Référence K 5446 CO5 Page 7<br />
H 1 = - K m H2(p) =<br />
K6 = 0.848/2 mm/rd<br />
2<br />
0,848<br />
(Jp f<br />
v<br />
)<br />
H 3 p) =<br />
p<br />
1<br />
1.2.2 Modélisation <strong>de</strong> <strong>la</strong> fonction F.S.72 « Création <strong>de</strong> <strong>la</strong> consigne <strong>de</strong> courant »<br />
Cette fonction réalise <strong>la</strong> conversion Numérique analogique, c’est à dire le décodage<br />
<strong>de</strong> NEV. La gran<strong>de</strong>ur d’entrée est définie comme étant <strong>la</strong> sortie <strong>de</strong> bascules D, il s’agit d’un<br />
signal bloqué (bien qu’étant encore codé). Il est parfaitement défini quel que soit t.<br />
Q2) Donner les caractéristiques technologiques principales d’un convertisseur<br />
numérique analogique. Citer les principaux principes <strong>de</strong> conversion utilisés dans<br />
un convertisseur analogique numérique et indiquer leurs avantages ou<br />
inconvénient technologique.<br />
Caractéristiques technologiques élémentaires<br />
Durée <strong>de</strong> conversion (ou l’inverse, ca<strong>de</strong>nce maximale <strong>de</strong> conversion) qui caractérise <strong>la</strong><br />
rapidité <strong>du</strong> convertisseur.<br />
Nombre <strong>de</strong> bits en entrée (résolution)<br />
Caractéristiques complémentaires intervenant dans les critères <strong>de</strong> choix<br />
Nature <strong>de</strong> <strong>la</strong> sortie (convertisseur unipo<strong>la</strong>ire ou bipo<strong>la</strong>ire) valeur <strong>de</strong> <strong>la</strong> sortie pleine<br />
échelle.<br />
Mo<strong>de</strong> d’interfaçage en entrée (Mo<strong>de</strong> <strong>de</strong> codage <strong>de</strong> l’entrée, entrée série ou parallèle,<br />
présence <strong>de</strong> bascules intégrées au CNA <strong>de</strong> manière à bloquer le co<strong>de</strong> numérique à<br />
l’entrée pour l'interfaçage avec un microprocesseur, valeurs <strong>de</strong>s niveaux logiques en<br />
entrée..)<br />
Défauts potentiels d’un convertisseur : ensemble <strong>de</strong> défauts concernant <strong>la</strong> précision <strong>du</strong><br />
convertisseur (défaut <strong>de</strong> linéarité, précision , erreur <strong>de</strong> déca<strong>la</strong>ge…)<br />
Consommation, possibilité <strong>de</strong> mise en veille <strong>du</strong> convertisseur (shut down), etc..<br />
Principe <strong>de</strong> conversion utilisés<br />
Le principe <strong>de</strong> conversion repose sur un réseau <strong>de</strong> commutateurs associé à un<br />
réseau <strong>de</strong> résistance, une tension (ou un courant) <strong>de</strong> référence. Les commutateurs sont<br />
commandés par les signaux logiques correspondant au mot à convertir. Suivant <strong>la</strong> nature<br />
<strong>du</strong> réseau <strong>de</strong> résistances, on parle <strong>de</strong> CNA à résistances pondérées ou <strong>de</strong> CNA à réseau<br />
R-2R.<br />
Convertisseur à résistances pondérées : les résistances sont pondérées <strong>de</strong> manière à<br />
ce que les courants générés par chaque branche soient en progression géométrique. Le<br />
courant fourni par <strong>la</strong> branche sélectionnée. La réalisation <strong>du</strong> réseau précis avec une<br />
dynamique <strong>de</strong> valeur importante ((les résistances sont toutes différentes al<strong>la</strong>nt <strong>de</strong> R à 128<br />
R pour 8 bits) est plus complexe que pour le réseau R-2R.<br />
Convertisseur à réseau R-2R : Plusieurs variantes existent, <strong>la</strong> plus intéressante étant<br />
le convertisseur à échelle R-2R inversée pour lequel le courant circule toujours dans le<br />
même sens dans le commutateur. En évitant au courant <strong>de</strong> s’inverser lors <strong>de</strong> <strong>la</strong><br />
commutation, on limite les temps <strong>de</strong> commutation ce qui permet d'avoir <strong>de</strong>s convertisseurs<br />
plus rapi<strong>de</strong>s.<br />
Agnès FOUCHER - Christian VALADE<br />
09/98
Page 8 Référence K 5446 C05<br />
Dans <strong>la</strong> majorité <strong>de</strong>s cas <strong>la</strong> gran<strong>de</strong>ur <strong>de</strong> sortie <strong>du</strong> circuit intégré est un courant Is. Elle<br />
se met souvent sous <strong>la</strong> forme suivante,<br />
Is = K N E ref /R avec<br />
N le mot numérique présent en entrée<br />
R élément résistif <strong>du</strong> réseau interne au circuit intégré<br />
E ref une tension <strong>de</strong> référence externe au composant<br />
K un coefficient lié à <strong>la</strong> résolution <strong>du</strong> convertisseur.<br />
La précision <strong>de</strong> <strong>la</strong> conversion provient à <strong>la</strong> fois <strong>de</strong> <strong>la</strong> qualité <strong>du</strong> réseau <strong>de</strong> résistances<br />
interne et <strong>de</strong> <strong>la</strong> qualité <strong>de</strong> <strong>la</strong> source <strong>de</strong> tension <strong>de</strong> référence qui doit être particulièrement<br />
soignée. Cette référence est parfois elle aussi intégrée dans le composant. CNA<br />
Un circuit intégré linéaire externe est ajouté <strong>de</strong> manière à réaliser une conversion<br />
courant tension.<br />
Q3) Certains convertisseurs sont qualifiés <strong>de</strong> CNA multiplieur. Justifier cette<br />
appel<strong>la</strong>tion.<br />
La gran<strong>de</strong>ur analogique <strong>de</strong> sortie <strong>du</strong> convertisseur S (tension ou courant) peut<br />
dépendre à <strong>la</strong> fois <strong>du</strong> co<strong>de</strong> présent sur les entrées numériques et d’une autre gran<strong>de</strong>ur<br />
analogique E ref (tension ou courant). La sortie S se met alors sous <strong>la</strong> forme S = K x E ref N.<br />
La fonction réalisée par le composant est une conversion numérique analogique si<br />
E ref est constant. S = (K x E ref ) N<br />
Par contre, <strong>la</strong> fonction réalisée par le composant est une multiplication si E ref et N<br />
sont variables.<br />
écrit<br />
Ce composant peut aussi réaliser une amplification programmable. Dans ce cas, on<br />
S = K N E ref avec K égal à K x N amplification rég<strong>la</strong>ble.<br />
Q4) Expliciter les termes suivants : convertisseur <strong>de</strong>ux quadrants, quatre quadrants,<br />
convertisseur unipo<strong>la</strong>ire, bipo<strong>la</strong>ire. Quel est dans l'application étudiée (<strong>la</strong> perche<br />
Pirée) le type nécessaire ?<br />
Si le co<strong>de</strong> présent correspond à un nombre compris positif (compris entre 0 et 2 N ) et<br />
que <strong>la</strong> tension analogique en sortie <strong>du</strong> convertisseur est uniquement positive (ou<br />
uniquement négative), on dit que le convertisseur est unipo<strong>la</strong>ire.<br />
Si le co<strong>de</strong> présent correspond à un nombre compris qui évolue entre -2 N-1 et +2 N-1 , (N<br />
étant le nombre <strong>de</strong> bits <strong>du</strong> convertisseur) et que <strong>la</strong> tension analogique en sortie est tantôt<br />
positive tantôt négative, on dit que le convertisseur est bipo<strong>la</strong>ire.<br />
Si on considère que le co<strong>de</strong> d’entrée évolue entre -2 N-1 et +2 N-1 mais que <strong>la</strong> tension <strong>de</strong><br />
sortie ne peut être que positive. On dira que l’on a un convertisseur <strong>de</strong>ux quadrants.<br />
Si on considère que le co<strong>de</strong> d’entrée évolue entre -2 N-1 et +2 N-1 et que <strong>la</strong> <strong>de</strong>uxième<br />
entrée (E ref ) peut aussi être positive et négative, on dira que l’on a un convertisseur<br />
(multiplieur) quatre quadrants.<br />
CENTRE NATIONAL D’ENSEIGNEMENT A DISTANCE DE VANVES<br />
09/98
Référence K 5446 CO5 Page 9<br />
Dans l'application étudiée, le mot présent à l'entrée représente le courant souhaité<br />
dans le moteur. Il peut être tantôt positif tantôt négatif . le mot est considéré comme signé.<br />
La gran<strong>de</strong>ur <strong>de</strong> sortie <strong>du</strong> convertisseur doit pouvoir, elle aussi, être positive ou négative. Il<br />
faut donc utiliser un convertisseur bipo<strong>la</strong>ire.<br />
V ic (t) est <strong>la</strong> différence <strong>de</strong> potentiel disponible entre <strong>la</strong> broche 1 <strong>du</strong> circuit L 291 et <strong>la</strong><br />
masse. On notera I ref le courant qui circule dans l’élément résistif R 600 . On note C <strong>la</strong><br />
capacité équivalente à C 604 en série avec C 603 .<br />
Q5) Exprimer <strong>la</strong> re<strong>la</strong>tion entre le courant I dacout et Nev le nombre présent à l’entrée.<br />
Pour NEV = 1, le co<strong>de</strong> à l’entrée <strong>du</strong> convertisseur est 11 1110, le courant I dacout qui<br />
sort <strong>de</strong> <strong>la</strong> broche 12 <strong>du</strong> circuit L 291, a pour intensité,<br />
I dacout = I ref<br />
16<br />
Le tableau donné dans <strong>la</strong> documentation constructeur montre que I dacout augmente<br />
régulièrement avec le co<strong>de</strong> <strong>de</strong> NEV. On peut écrire I dacout est proportionnel à NEV,<br />
I dacout = NEV I ref<br />
16<br />
I ref est le courant qui circule dans <strong>la</strong> résistance R 600 p<strong>la</strong>cée entre <strong>la</strong> borne 9 et<br />
l’alimentation (+5V). Donc I ref = 0,5 mA et,<br />
I dacout = 3,125 10 -5 NEV<br />
Q6) Exprimer <strong>la</strong> re<strong>la</strong>tion entre Vic(p) et NEV(p) et <strong>la</strong> mettre sous <strong>la</strong> forme<br />
T(p) =<br />
Vic ( p )<br />
NEV( p) =K 1 1p<br />
na . Préciser les expressions <strong>de</strong>s coefficients en<br />
1 p<br />
fonction <strong>de</strong>s composants passifs.<br />
2<br />
La présence <strong>de</strong> l’amplificateur linéaire interne au circuit L 291, nous permet d’écrire,<br />
Vic = - Z I dacout<br />
avec Z l’impédance composée <strong>de</strong>s éléments passifs, R 601, R 602, C 603 et C 604, vue entre<br />
les bornes 12 et 1. Donc,<br />
Z(p) = R 601 +<br />
1<br />
R<br />
R<br />
602<br />
602<br />
Cp<br />
avec C = (C 603 C 604 ) / (C 603 + C 604 ) = 11 µF<br />
ou encore<br />
avec R = R<br />
R<br />
Z(p) = R ( 1 R Cp ) R<br />
1 R Cp<br />
R<br />
R<br />
601 602<br />
601 602<br />
601 602 602<br />
602<br />
1 RCp<br />
= ( R601 R602<br />
)<br />
1 R Cp<br />
602<br />
On obtient alors,<br />
Agnès FOUCHER - Christian VALADE<br />
09/98
Page 10 Référence K 5446 C05<br />
Vic(p) = - I ref<br />
16 ( R R )<br />
1 RCp<br />
601 602<br />
1 R Cp<br />
602<br />
NEV(p)<br />
Vic (p) = K na<br />
1 RCp<br />
Cp NEV(p)<br />
1 R602<br />
1 = RC = R 601. R 602 C . C<br />
R R C C<br />
601 602<br />
603 604<br />
603 604<br />
= 0,68 s<br />
2 = R 602 C = 7,48 s<br />
K na = - I ref<br />
16 (R 601+R 602 ) = - 23,37 V<br />
Q7) Les con<strong>de</strong>nsateurs C603 et C604 sont otés. Que <strong>de</strong>vient l'expression <strong>de</strong> <strong>la</strong><br />
fonction <strong>de</strong> transfert ?<br />
L’impédance Z <strong>de</strong>vient égale à R601+R602. La re<strong>la</strong>tion s’écrit<br />
Vic (p) = K na NEV(p)<br />
avec K na =- I ref<br />
16 (R 601+R 602 )<br />
On peut également remarquer que lorsqu'un con<strong>de</strong>nsateur est ôté (remp<strong>la</strong>cé par un<br />
circuit ouvert), son impédance est infinie 1/C est infini ou plus simplement le terme Cp est<br />
à remp<strong>la</strong>cer par 0. Donc<br />
1 RCp<br />
1<br />
602<br />
R Cp<br />
<strong>de</strong>vient égal à 1.<br />
Vic p<br />
Q8) On souhaite obtenir que <strong>la</strong> fonction <strong>de</strong> transfert T(p) =<br />
( ) soit celle d’un<br />
NEV( p)<br />
correcteur proportionnel intégral, que <strong>de</strong>vient le schéma structurel? Préciser<br />
l’expression <strong>de</strong> <strong>la</strong> fonction <strong>de</strong> transfert en fonction <strong>de</strong>s composants passifs<br />
utilisés.<br />
La fonction <strong>de</strong> transfert d’un correcteur proportionnel intégral est <strong>de</strong> <strong>la</strong> forme K+<br />
1<br />
ou encore K+<br />
N<br />
p<br />
. Cette fonction <strong>de</strong> transfert sera obtenue si R602 est nulle.<br />
p<br />
i<br />
1<br />
i p<br />
Le schéma structurel s'obtient donc en conservant les con<strong>de</strong>nsateurs et R601 et en<br />
remp<strong>la</strong>çant R602 par un court-circuit.<br />
1<br />
Alors Z(p) est égale à R 601 + . Cp<br />
CENTRE NATIONAL D’ENSEIGNEMENT A DISTANCE DE VANVES<br />
09/98
Référence K 5446 CO5 Page 11<br />
Vic (p) = K na<br />
Vic (p) = - I ref<br />
1 R<br />
601Cp<br />
16 Cp<br />
1 R<br />
601Cp<br />
NEV(p)<br />
R Cp<br />
601<br />
NEV(p)<br />
avec K na = - I ref<br />
16 R 601<br />
1.3 MODELISATION DES BLOCS « A TEMPS DISCRET ».<br />
Les interrupteurs schématisent <strong>la</strong> présence <strong>de</strong> gran<strong>de</strong>urs qui sont sous forme<br />
d’échantillons. Ils ne correspon<strong>de</strong>nt pas toujours à <strong>la</strong> présence d’un interrupteur<br />
échantillonneur matériel à base d’un commutateur analogique. En fait, ils sont p<strong>la</strong>cés<br />
<strong>de</strong>vant chaque bloc pour lequel le comportement interne est indépendant <strong>de</strong> ce qui se<br />
passe à l’entrée entre <strong>de</strong>ux dates nTe. C’est <strong>la</strong> raison pour <strong>la</strong>quelle ce symbole a été p<strong>la</strong>cé<br />
<strong>de</strong>vant l’entrée <strong>du</strong> bloqueur pour bien insister sur le fait que l’entrée d’un bloqueur est un<br />
signal échantillonné.<br />
On cherche dans <strong>la</strong> suite <strong>de</strong> ce problème à définir <strong>de</strong>s comportements analogiques<br />
simi<strong>la</strong>ires au comportement échantillonné.<br />
1.3.1 Modélisation <strong>de</strong> <strong>la</strong> structure remplissant <strong>la</strong> fonction « calcul <strong>de</strong> <strong>la</strong> viteSSE »<br />
Rappels sur le fonctionnement <strong>de</strong> l’objet étudié<br />
Le co<strong>de</strong>ur optique délivre 120 impulsions par tour. Un tour correspond à un Pas<br />
<strong>de</strong> 0,848 mm. On a (120/0,848) soit 141,51 impulsions par mm.<br />
NVM(nTe) est proportionnel au dép<strong>la</strong>cement pendant <strong>la</strong> <strong>du</strong>rée Te. Donc, en notant<br />
Positionrel(t) <strong>la</strong> position en mm <strong>du</strong> moulinet par rapport à <strong>la</strong> position lors d’un passage par<br />
zéro <strong>du</strong> compteur, on peut écrire,<br />
NVM(nTe) = Kp.[Positionrel(nTe) - Positionrel[(n-1)Te]] avec Kp =141,51mm -1<br />
Ou encore, en notant Profon<strong>de</strong>ur(t) <strong>la</strong> position <strong>du</strong> moulinet par rapport à <strong>la</strong> surface <strong>de</strong><br />
l’eau,<br />
NVM(nTe) = Kp.[ Profon<strong>de</strong>ur (nTe) - Profon<strong>de</strong>ur [(n-1)Te]]<br />
Dans le document support, NVM(nTe) a été mis sous <strong>la</strong> forme,<br />
NVM(nTe) = Posrel(nTe) - Posrel[(n-1)Te],<br />
On peut aussi écrire<br />
Posrel(t) = K p .Positionrel(t) ou K p .Profon<strong>de</strong>ur(t) + Ko<br />
Avec Ko une constante indéfinie qui dépend <strong>de</strong> l'origine <strong>de</strong>s temps.<br />
Profon<strong>de</strong>ur(t) <strong>la</strong> position <strong>du</strong> moulinet par rapport à <strong>la</strong> surface <strong>de</strong> l’eau.<br />
Rappel : Posrel(t) correspond à différence <strong>de</strong>s sorties <strong>de</strong>s compteurs CMPT2-CMPT1<br />
puisque l’un mesure <strong>la</strong> montée, l’autre <strong>la</strong> <strong>de</strong>scente.<br />
Agnès FOUCHER - Christian VALADE<br />
09/98
Page 12 Référence K 5446 C05<br />
Analyse <strong>de</strong> <strong>la</strong> re<strong>la</strong>tion NVM(NT E ) = K P .[ Profon<strong>de</strong>ur(NT E ) - Profon<strong>de</strong>ur[(N-1)T E ]]<br />
1.3.2.1 Recherche <strong>de</strong>s chronogrammes.<br />
Q9) Si Profon<strong>de</strong>ur(t) évolue suivant un échelon <strong>de</strong> valeur P0 apparaissant à t égal à<br />
zéro, tracer l’évolution <strong>de</strong> NVM(nTe).<br />
t (ms) -<br />
7,07<br />
n=t/Te -<br />
1<br />
Profon<strong>de</strong>ur<br />
(mm)<br />
Profon<strong>de</strong>ur retardé <strong>de</strong> Te<br />
Profon<strong>de</strong>ur(n-1)Te<br />
0 Te<br />
=7,07<br />
4,14<br />
1<br />
1,28<br />
2<br />
8,3<br />
2<br />
35,35<br />
0 1 2 3 4 5<br />
0 0 Po P<br />
o<br />
0 0 0 P<br />
o<br />
NVM 0 0 Kp<br />
Po<br />
Kp P0<br />
o<br />
o<br />
P<br />
P<br />
o<br />
o<br />
P<br />
P<br />
Po<br />
Po<br />
0 0 0 0<br />
P0<br />
Profon<strong>de</strong>ur(nTe)<br />
NVM(nTe)<br />
t (ms)<br />
0 20 40 60 80 100 120 140 160<br />
Q10) Profon<strong>de</strong>ur(t) évolue suivant une rampe <strong>de</strong> pente +5mm/s pour t compris entre 0<br />
et 0,05s puis, Profon<strong>de</strong>ur(t) évolue suivant une rampe <strong>de</strong> pente -5mm/s. La<br />
pério<strong>de</strong> d’échantillonnage est <strong>de</strong> 7.07 ms. Tracer le chronogramme <strong>de</strong><br />
Profon<strong>de</strong>ur(t), Profon<strong>de</strong>ur(n(Te) et Profon<strong>de</strong>ur[(n-1)Te]], pour t compris entre 0<br />
et 0,1 s. Tracer en concordance <strong>de</strong> temps, l’évolution <strong>de</strong> NVM(nTe).<br />
t (ms) 0 7.07 14.14 21.28 …. 49.4 56.56 63.6 … 84.84 91.91 98.98 106.05<br />
Profon<strong>de</strong>ur(n) 0 3.52 7.07 10.56 …. 24.7 21.7 18.2 .. 7.6 4.07 0.54 -3.025<br />
Profon<strong>de</strong>ur(n-1) 0 0 3.52 7.05 …. 21.2 24.7 21.7 … 11.13 7.6 4.07 0.54<br />
NVM 0 5 5 5 …. 5 -5 -5 … -5 -5 -5<br />
Profon<strong>de</strong>ur[nTe]<br />
Profon<strong>de</strong>ur[(n-1)Te]<br />
5<br />
NVM(nTe)<br />
t (ms)<br />
0 50 100 150<br />
Profon<strong>de</strong>ur((n-1)Te) est retardé <strong>de</strong> Te par rapport à Profon<strong>de</strong>ur(nTe).<br />
CENTRE NATIONAL D’ENSEIGNEMENT A DISTANCE DE VANVES<br />
09/98
Référence K 5446 CO5 Page 13<br />
NVM (nTe) correspond à <strong>la</strong> dérivée <strong>de</strong> Profon<strong>de</strong>ur. Il présente un palier positif pour<br />
lequel NVM(nTe) vaut 5 Kp /Te soit +5, et un palier négatif.<br />
Q11) Quelles sont les modifications à apporter au chronogramme précé<strong>de</strong>nt si <strong>la</strong><br />
fréquence d’échantillonnage est <strong>de</strong> 100 Hz.<br />
Les formes <strong>de</strong>s chronogrammes obtenues sont simi<strong>la</strong>ires. Les échantillons sont un<br />
peu plus espacés. Les valeurs <strong>de</strong>s paliers <strong>de</strong> NVM sont différentes <strong>de</strong> celle obtenues dans<br />
le cas précé<strong>de</strong>nt car Kp /Te n’est plus égal à 1.<br />
Profon<strong>de</strong>ur[nTe]<br />
Profon<strong>de</strong>ur[(n-1)Te]<br />
5 Kp/Te<br />
NVM(nTe)<br />
t (ms)<br />
0 50 100 150<br />
-5 Kp /Te<br />
Q12) Les traitements numériques linéaires sont basés sur <strong>de</strong>s additions, <strong>de</strong>s<br />
multiplications par un coefficient et <strong>de</strong>s retards <strong>de</strong> Te. La transformée en z utilise<br />
<strong>la</strong> correspondance e pTe z. Donner l’expression <strong>de</strong> <strong>la</strong> fonction <strong>de</strong> transfert en<br />
z correspondant à l’équation aux différences,<br />
NVM(nTe) = Kp [ Profon<strong>de</strong>ur (nTe) - Profon<strong>de</strong>ur [(n-1)Te]]<br />
Profon<strong>de</strong>ur ((n-1)Te) est une gran<strong>de</strong>ur retardée <strong>de</strong> Te par rapport à Profon<strong>de</strong>ur(nTe). Ce<strong>la</strong><br />
correspond pour <strong>la</strong> transformée <strong>de</strong> Lap<strong>la</strong>ce à une multiplication par e -pTe<br />
Si on note P(z) <strong>la</strong> transformée en z <strong>de</strong> Profon<strong>de</strong>ur(nTe) et Pr(z) <strong>la</strong> transformée en z <strong>de</strong><br />
Profon<strong>de</strong>ur((n-1)Te), on obtient,<br />
Pr(z) = z -1 P(z)<br />
NVM(z) = Kp [1- z -1 ] P(z)<br />
NVM (z)<br />
La fonction <strong>de</strong> transfert s’écrit alors T(z) = = Kp [1- z -1 ]<br />
P(z)<br />
1.3.2.2 Compléments théoriques<br />
1.3.2.2.1 Analyse d’un chronogramme quelconque.<br />
Vitesse(mm/s)<br />
Profon<strong>de</strong>ur(mm)<br />
0 20 40 60 80 100 120<br />
t (ms)<br />
Figure 2. Exemple d’évolution <strong>de</strong> <strong>la</strong> profon<strong>de</strong>ur et <strong>de</strong> <strong>la</strong> vitesse.<br />
Agnès FOUCHER - Christian VALADE<br />
09/98
Page 14 Référence K 5446 C05<br />
Les tracés ci <strong>de</strong>ssus donnent un exemple d’évolution <strong>de</strong> <strong>la</strong> profon<strong>de</strong>ur et <strong>de</strong> <strong>la</strong> vitesse<br />
<strong>de</strong> dép<strong>la</strong>cement <strong>du</strong> moulinet.<br />
Les valeurs <strong>de</strong> <strong>la</strong> profon<strong>de</strong>ur et <strong>de</strong> <strong>la</strong> vitesse ainsi que les gran<strong>de</strong>urs captée CMPT1<br />
et CMPT2 ont été repro<strong>du</strong>ites dans le tableau suivant.<br />
t (ms) 0 7<br />
,07<br />
n=t/T<br />
e<br />
4,14<br />
1<br />
1,28<br />
2<br />
8,3<br />
2<br />
5,35<br />
3<br />
0 1 2 3 4 5 6 7 8 9 1<br />
0<br />
2,4<br />
4<br />
9,5<br />
4<br />
6,6<br />
5<br />
3,63<br />
6<br />
0,7<br />
7<br />
7,8<br />
1<br />
7<br />
1<br />
4,84<br />
2<br />
8<br />
1<br />
1,91<br />
3<br />
9<br />
1<br />
8,98<br />
4<br />
9<br />
1<br />
Profo<br />
n<strong>de</strong>ur<br />
(mm)<br />
V(t)m<br />
m/s<br />
Vites<br />
se<br />
0 0<br />
.042<br />
.113<br />
0<br />
4 8 1<br />
2<br />
.22<br />
8<br />
0<br />
1<br />
.36<br />
2<br />
0<br />
2<br />
.54<br />
8<br />
0<br />
2<br />
.73<br />
8<br />
0<br />
2<br />
.93<br />
8<br />
0<br />
2<br />
.13<br />
8<br />
1<br />
2<br />
.3<br />
2<br />
1<br />
2<br />
.44<br />
6<br />
1<br />
1<br />
.53<br />
1 1 1 1<br />
.58 .64 .7<br />
8 8 8 8<br />
CMP<br />
T1<br />
CMP<br />
T2<br />
500<br />
000<br />
1<br />
2<br />
494<br />
000<br />
1<br />
2<br />
484<br />
000<br />
NVM 4 6 1<br />
0<br />
NPM 0 6 1<br />
6<br />
NPM/<br />
Kp<br />
0 0<br />
.04<br />
.11<br />
1<br />
2<br />
0<br />
469<br />
000<br />
5<br />
1<br />
.22<br />
1<br />
2<br />
1<br />
3<br />
0<br />
449<br />
000<br />
0<br />
1<br />
.36<br />
1<br />
2<br />
2<br />
5<br />
0<br />
424<br />
000<br />
5<br />
6<br />
.54<br />
1<br />
2<br />
2<br />
7<br />
0<br />
396<br />
000<br />
8<br />
04<br />
.73<br />
1<br />
2<br />
2<br />
1<br />
0<br />
368<br />
000<br />
8<br />
32<br />
.93<br />
1<br />
2<br />
2<br />
1<br />
0<br />
340<br />
000<br />
8<br />
60<br />
.13<br />
1<br />
2<br />
2<br />
1<br />
1<br />
315<br />
000<br />
5<br />
85<br />
.3<br />
1<br />
2<br />
2<br />
1<br />
1<br />
296<br />
000<br />
9<br />
04<br />
.44<br />
1<br />
2<br />
1<br />
2<br />
1<br />
284<br />
000<br />
2<br />
16<br />
.5<br />
1<br />
2<br />
1<br />
2<br />
1<br />
276<br />
000<br />
24<br />
.5<br />
1 1 1<br />
268 260<br />
2 2 2<br />
000 000<br />
8 8 8<br />
2 2 2<br />
32 40<br />
1 1 1<br />
.6 .7<br />
Le tracé ci <strong>de</strong>ssous Figure 3 donne l’évolution<br />
V(t) (vitesse réelle),<br />
<strong>de</strong>s échantillons NVM(nTe) (gros points) avec Fe=141,51 Hz soit Kp.Te =1<br />
Sur ce graphe, le chronogramme d’un signal analogique fictif noté NVM fictif (t) a été<br />
tracé en lissant les points correspondant aux échantillons NVM(nTe).<br />
NVM fictif (t) est donc gran<strong>de</strong>ur fictive restituée <strong>de</strong> manière idéale et non pas par<br />
blocage à partir <strong>de</strong>s échantillons. NVMfictif(t) permet d’analyser l’influence <strong>du</strong> calcul<br />
numérique (indépendamment <strong>de</strong> l’échantillonnage et <strong>du</strong> blocage).<br />
Si on compare NVMfictif(t) avec V(t) (vitesse réelle), on constate que les <strong>de</strong>ux courbes<br />
sont re<strong>la</strong>tivement proches.<br />
CENTRE NATIONAL D’ENSEIGNEMENT A DISTANCE DE VANVES<br />
09/98
Référence K 5446 CO5 Page 15<br />
NVM et Vitesse (mm/s)<br />
Vitesse 30 réelle<br />
Echantillons NVM(nTe)<br />
20<br />
10<br />
NVM fictif<br />
0<br />
0 20 40 60 80 100 120<br />
t (ms)<br />
Figure 3. Représentation <strong>de</strong>s échantillons NVM(nTe) (gros points),<br />
<strong>de</strong> NVMfictif(t) (pointillés) et <strong>de</strong> <strong>la</strong> vitesse réelle.<br />
Si l’évolution <strong>de</strong> <strong>la</strong> vitesse est lente par rapport à Te, alors NVMf fictif apparaît comme<br />
légèrement retardé par rapport à V(t). On pourrait alors écrire NVM fictif (t) = V(t- )<br />
Puisque <strong>la</strong> vitesse est <strong>la</strong> dérivée <strong>de</strong> <strong>la</strong> position, on pourrait aussi écrire l’approximation<br />
suivante,<br />
NVM fictif (t) = K p .Te.V(t- ) ou NVM fictif (t) = K p .Te. d Pr ofon<strong>de</strong>ur<br />
dt<br />
( t )<br />
est défini comme étant le retard intro<strong>du</strong>it par <strong>la</strong> dérivation numérique réalisée par<br />
l’opération, NVM(nTe) = K p .[Profon<strong>de</strong>ur(nTe) - Profon<strong>de</strong>ur[(n-1)Te]]. Nous allons dans le<br />
paragraphe suivant vali<strong>de</strong>r ces remarques.<br />
1.3.2.2.2 Interprétation <strong>de</strong> <strong>la</strong> fonction <strong>de</strong> transfert harmonique d’un filtre numérique.<br />
Soit NVMf fictif (t) le signal analogique reconstitué à partir <strong>de</strong>s échantillons <strong>de</strong> sortie, <strong>la</strong><br />
fonction <strong>de</strong> transfert permet d’obtenir <strong>la</strong> re<strong>la</strong>tion entre l’amplitu<strong>de</strong> <strong>de</strong> NVMf fictif (t) et celle <strong>de</strong><br />
l’entrée Profon<strong>de</strong>ur(t). Ceci peut être symbolisé par <strong>la</strong> représentation ci <strong>de</strong>ssous.<br />
Profon<strong>de</strong>ur (t)<br />
Profon<strong>de</strong>ur (nTe)<br />
Profon<strong>de</strong>ur*(j )<br />
T*(j )<br />
NVM(nTe)<br />
NVM*(j )<br />
Restitution<br />
parfaite<br />
NVM fictif (t)<br />
Profon<strong>de</strong>ur (t)<br />
Profon<strong>de</strong>ur(j<br />
T*( j )<br />
NVM fictif (t)<br />
NVM fictif (j )<br />
Figure 4. Interprétation <strong>de</strong> <strong>la</strong> fonction <strong>de</strong> transfert T*(j )<br />
Agnès FOUCHER - Christian VALADE<br />
09/98
Page 16 Référence K 5446 C05<br />
Q13) Sachant que pour avoir <strong>la</strong> fonction <strong>de</strong> transfert harmonique, il suffit <strong>de</strong> remp<strong>la</strong>cer<br />
z par e j Te , donner <strong>la</strong> fonction <strong>de</strong> transfert harmonique reliant NVM* et<br />
-j Te/2<br />
Profon<strong>de</strong>ur* et <strong>la</strong> mettre sous <strong>la</strong> forme : T*(j ) = 2 j K p . sin( Te/2) .e<br />
Comme T(z) est égal à K p [1- z -1 ], on obtient T*(j ) =<br />
NVM * (j )<br />
Pr ofon<strong>de</strong>ur * (j<br />
= K p (1-e - j Te )<br />
)<br />
j Te<br />
j Te<br />
j Te<br />
j Te<br />
2<br />
2<br />
2 2<br />
En mettant e en facteur, on obtient T*(j ) = K p e ( e - e )<br />
Et en utilisant <strong>la</strong> re<strong>la</strong>tion d’Euler,<br />
j Te<br />
2<br />
T*(j ) = 2 j K p e<br />
Remarque :<br />
sin<br />
T<br />
2<br />
e<br />
On note systématiquement avec une astérisque <strong>la</strong> fonction <strong>de</strong> transfert harmonique<br />
qui concernent <strong>de</strong>s échantillons pour éviter toute confusions avec <strong>la</strong> gran<strong>de</strong>ur définie<br />
quelque soit t .<br />
Q14) Après avoir analysé <strong>la</strong> courbe <strong>de</strong> mo<strong>du</strong>le et <strong>la</strong> courbe d’argument en fonction <strong>de</strong><br />
f, pour f inférieur compris entre 0 à Fe/2, déterminer <strong>la</strong> gamme <strong>de</strong> fréquence pour<br />
<strong>la</strong>quelle <strong>la</strong> fonction <strong>de</strong> transfert T*(j ) pourra être considérée comme équivalente<br />
à un dérivateur associé à un retard <strong>de</strong> Te/2 avec une erreur inférieure à 10%.<br />
T<br />
Le mo<strong>du</strong>le <strong>de</strong> T*(j ) est égal à 2 K p sin<br />
2<br />
T<br />
Son argument est égal à<br />
e .<br />
2 2<br />
Si x
Référence K 5446 CO5 Page 17<br />
Remarque : On a donc T*(p) =<br />
NVM<br />
fictif<br />
( p)<br />
Pr ofon<strong>de</strong>ur( p)<br />
K T p e<br />
p<br />
e<br />
pT e<br />
/2<br />
Ou encore NVM fictif (t) = K p .Te. d Pr<br />
ofon<strong>de</strong>ur<br />
dt<br />
( t ) avec =Te/2,<br />
Dans cette étu<strong>de</strong>, on a totalement négligé l’influence <strong>de</strong> <strong>la</strong> quantification, c’est à dire<br />
ici le fait que NVM est un entier.<br />
1.3.3 Complément théorique : Modélisation <strong>de</strong> l’influence <strong>de</strong> l’échantillonnage et <strong>du</strong> blocage.<br />
On étudie l’influence <strong>de</strong> l’opération <strong>de</strong> calcul numérique<br />
NVM(nTe) = Kp.[Positionrel(nTe) - Positionrel[(n-1)Te]], en supposant que <strong>la</strong><br />
restitution était parfaite (lissage parfait <strong>de</strong>s échantillons).<br />
L’analyse <strong>de</strong> l’influence <strong>du</strong> blocage seul se fait en considérant que l’entrée <strong>du</strong><br />
bloqueur est un signal échantillonné, constitué d’impulsions <strong>de</strong> DIRAC S* echan . L’effet d’un<br />
blocage pendant <strong>la</strong> <strong>du</strong>rée T e <strong>de</strong> signal échantillonné purement mathématique peut être<br />
rigoureusement modélisé par <strong>la</strong> fonction <strong>de</strong> transfert.<br />
S bloqué (j )/ S* echan (j ) = T b (j ) = 1-e - j Te / j<br />
Si après le bloqueur, <strong>de</strong>s structures contribuent à supprimer les raies <strong>de</strong> fréquence<br />
supérieure à Fe/2 occasionnée par l’échantillonnage, alors l’influence <strong>de</strong> l’échantillonnage<br />
ET <strong>du</strong> blocage d’un signal analogique, peut être tra<strong>du</strong>ite par une fonction <strong>de</strong> transfert.<br />
Le modèle mathématique analogique d'un ensemble échantillonneur - bloqueur est<br />
alors assimilé à: T eb (j ) = [1 - e -j Te ] / j Te.<br />
Conditions <strong>de</strong> validité<br />
- T eb (j ) = S bloqué (j )/ S a (j ) avec<br />
- S a (t) gran<strong>de</strong>ur analogique située avant l'échantillonneur <strong>de</strong> fréquence maximale f max<br />
inférieur à Fe/2,<br />
- S bloqué (t) <strong>la</strong> gran<strong>de</strong>ur analogique en sortie <strong>du</strong> bloqueur, pour <strong>la</strong>quelle on néglige les<br />
composantes spectrales au-<strong>de</strong>là <strong>de</strong> Fe/2. Le modèle est donc va<strong>la</strong>ble si après le<br />
bloqueur, on peut considérer qu'il y a un comportement <strong>de</strong> type passe - bas avec une<br />
fréquence <strong>de</strong> coupure >>f max .<br />
Agnès FOUCHER - Christian VALADE<br />
09/98
Page 18 Référence K 5446 C05<br />
Sa<br />
Sa*<br />
Blocage<br />
Sbloqué<br />
Filtre passe bas<br />
Sf<br />
pendant Te<br />
F(p)<br />
Sa<br />
-pTe<br />
(1 - e )<br />
pTe<br />
Filtre passe bas<br />
F(p)<br />
Sf<br />
Figure 5. Approximation analogique équivalent <strong>de</strong> l’échantillonnage et <strong>du</strong><br />
blocage en présence d’un filtre passe bas après le bloqueur.<br />
sin<br />
T e<br />
j T e<br />
2<br />
On peut encore écrire que T eb (j ) = e<br />
2<br />
T<br />
2<br />
sin<br />
T<br />
2<br />
Pour f
Référence K 5446 CO5 Page 19<br />
NVC<br />
+<br />
-<br />
NEVNA<br />
-pTe<br />
(1 - e )<br />
pTe<br />
NEV<br />
NVMfictif<br />
Tda(p)=k.Te. p.e<br />
-pTe/2<br />
Profon<strong>de</strong>ur<br />
Figure 6. Modèle analogique équivalent <strong>du</strong> traitement numérique,<br />
<strong>de</strong> l’échantillonnage et <strong>du</strong> blocage. Avec k = Kp=120/0,848 et k.Te=<br />
Kv=1mm/s.<br />
La limite <strong>de</strong> validité <strong>du</strong> modèle équivalent analogique Tda est <strong>la</strong> ban<strong>de</strong> <strong>de</strong> fréquence<br />
[0, Fe/4] environ. Pour Fe égal à 141,5 Hz, on obtient <strong>la</strong> ban<strong>de</strong> <strong>de</strong> fréquence [0, 35 Hz].<br />
Pour <strong>la</strong> ban<strong>de</strong> <strong>de</strong> fréquence [0, Fe/4], on peut également considérer que l’ensemble<br />
échantillonnage blocage apporte un simple retard <strong>de</strong> Te/2 , soit T eb (j )<br />
La vitesse <strong>de</strong> remontée <strong>du</strong> moulinet en mm/s vérifie V(p) = 0,848. m(p) avec m <strong>la</strong><br />
vitesse <strong>de</strong> rotation <strong>de</strong> l’axe <strong>du</strong> moteur en rd/s. On obtient <strong>la</strong> représentation ci <strong>de</strong>ssous,<br />
e<br />
j<br />
2<br />
T e<br />
NVC<br />
+<br />
-<br />
NEVNA<br />
-pTe<br />
(1 - e )<br />
=<br />
pTe<br />
-pTe/2<br />
e<br />
NEV<br />
Kna<br />
1 + p/w1<br />
1 + p/w2<br />
Vic<br />
Ki<br />
1 + p/wi<br />
Im<br />
K2<br />
1 + p/w4<br />
Vitesse<br />
mm/s<br />
NVMfictif<br />
Tda(p)=k.Te. p.e<br />
-pTe/2<br />
Profon<strong>de</strong>ur<br />
1/p<br />
Vitesse<br />
Figure 7. Modèle analogique <strong>de</strong> l’asservissement <strong>de</strong> vitesse. Domaine <strong>de</strong><br />
validité [0, Fe/4] environ. Pas <strong>de</strong> frottements secs;<br />
k =K p = 120 /0,848 impulsion/mm<br />
K i = 0,267 A/V et i > 6000 rd/s<br />
K 2 = -K m .(0,848).(2. / f v et 4 = f v /J =6,66 rd/s ou f 4 = 1 Hz.<br />
K na = - 23,37V 1 =1/ 1 = 0,68 s 1 = 1,47 rd/s f 1 = 0,23 Hz<br />
et 2 = 1/ 2 = 7,48 s 2 = 0,13 rd/s f 2 = 0,021 Hz<br />
La <strong>du</strong>rée <strong>de</strong> calcul et le temps <strong>de</strong> conversion <strong>du</strong> convertisseur numérique analogique<br />
peuvent être négligés dans cette étu<strong>de</strong>. Leur valeur évaluée à 0,1 ms est négligeable<br />
<strong>de</strong>vant le retard Te = 7,07 ms apporté par <strong>la</strong> dérivation numérique et l’échantillonnage<br />
blocage.<br />
Agnès FOUCHER - Christian VALADE<br />
09/98
Page 20 Référence K 5446 C05<br />
On peut également utiliser le modèle ci <strong>de</strong>ssous, puisque le capteur <strong>de</strong> dép<strong>la</strong>cement<br />
(co<strong>de</strong>ur optique) repère <strong>la</strong> rotation <strong>de</strong> l’arbre <strong>du</strong> moteur. La gran<strong>de</strong>ur <strong>de</strong> sortie <strong>de</strong> <strong>la</strong> boucle<br />
est alors <strong>la</strong> vitesse <strong>de</strong> l’arbre <strong>du</strong> moteur en rd/s<br />
NVC<br />
+<br />
-<br />
NEVNA<br />
-pTe<br />
(1 - e )<br />
=<br />
pTe<br />
-pTe/2<br />
e<br />
NEV<br />
1 + p/w1<br />
Kna<br />
1 + p/w2<br />
Vic<br />
Ki<br />
1 + p/wi<br />
Im<br />
K'2<br />
1 + p/w4<br />
K6<br />
Vitesse<br />
mm/s<br />
NVMfictif<br />
-pTe/2<br />
Tda(p)=Te. p.e<br />
Posrel<br />
Kco<strong>de</strong>ur<br />
Angle <strong>de</strong> rotation(rd)<br />
1/p<br />
Vitesse rotation (rd/s)<br />
Figure 8. Variante <strong>du</strong> modèle analogique <strong>de</strong> l’asservissement <strong>de</strong> vitesse<br />
K’ 2 = K2/K6 = - K m /fv<br />
K co<strong>de</strong>ur = 120/2 (120 impulsions par radian)<br />
K 6 = 0,848/2 (mm/rad)<br />
On ne tient pas compte <strong>de</strong>s frottements secs.<br />
On considère que fv est égal à 10 -4 N.m/s et que J est égal à 1,5 10 -5 Kg.m².<br />
2.1 ETUDE DE LA REPONSE A UN ECHELON<br />
Q16) Déterminer l’expression 1% <strong>de</strong> l’erreur statique (en pourcentage) pour une<br />
vitesse <strong>de</strong> Consigne NVC0 constante égale à 10 mm/s en fonction <strong>de</strong> R602,<br />
R601, C603, C604, <strong>de</strong> f v , T e , <strong>de</strong> K i coefficient <strong>du</strong> L292, <strong>du</strong> coefficient <strong>de</strong> couple<br />
K m , <strong>de</strong> K co<strong>de</strong>ur . (K co<strong>de</strong>ur =120/2 ). Calculer <strong>la</strong> valeur <strong>de</strong> l’erreur statique NEV et sa<br />
valeur en pourcentage pour un coefficient <strong>de</strong> frottement fv <strong>de</strong> 10 -4 N.m/s et Fe<br />
égal à 141.51Hz.<br />
Expression générale <strong>de</strong> l'erreur statique en fonction <strong>de</strong> Tbo<br />
L'erreur statique est égale à <strong>la</strong> limite prise par l'erreur NEVNA (pour t tend vers l'infini)<br />
lorsque l'entrée est un échelon.<br />
Le théorème <strong>de</strong> <strong>la</strong> valeur finale, permet d'écrire que,<br />
t<br />
lim<br />
(NEVNA(t)<br />
p<br />
lim<br />
0<br />
p NEVNA(p)<br />
La fonction <strong>de</strong> transfert d'erreur est définie par<br />
T erreur =<br />
NEVNA<br />
=Terreur =<br />
NVC<br />
1<br />
1<br />
T BO<br />
CENTRE NATIONAL D’ENSEIGNEMENT A DISTANCE DE VANVES<br />
09/98
Référence K 5446 CO5 Page 21<br />
NEVNA(p) =<br />
1<br />
1<br />
T BO<br />
NVC(p)<br />
Pour une entrée <strong>de</strong> consigne sous forme d'un échelon, NVC(p) est égal à<br />
NVCO<br />
p<br />
Ce<strong>la</strong> con<strong>du</strong>it à lim p NEVNA(p)<br />
=<br />
p<br />
0<br />
p<br />
lim<br />
Expression <strong>de</strong> <strong>la</strong> fonction <strong>de</strong> transfert en boucle ouverte<br />
On a vu que<br />
0<br />
NVCO<br />
1<br />
T BO<br />
Vic(p) = - I ref<br />
16 ( R R )<br />
1 RCp<br />
601 602<br />
1 R Cp<br />
602<br />
NEV(p)<br />
K na = - I ref<br />
16 (R 601+R 602 )<br />
L'amplification statique (pour <strong>la</strong> fréquence nulle) <strong>du</strong> convertisseur numérique<br />
analogique est égale à K na .<br />
La fonction <strong>de</strong> transfert en boucle ouverte s'écrit,<br />
Tbo(p) =<br />
e<br />
pTe / 2<br />
K<br />
na<br />
1<br />
1<br />
p /<br />
p /<br />
1<br />
2<br />
K K<br />
i<br />
2<br />
1<br />
1<br />
p /<br />
4<br />
K<br />
p<br />
T<br />
e<br />
e<br />
pTe / 2<br />
On obtient l'expression <strong>de</strong> l'erreur statique suivante<br />
pt<br />
lim<br />
0<br />
p NEVNA(p)<br />
=<br />
1<br />
K<br />
na<br />
NVCO<br />
KiKmK<br />
f<br />
v<br />
co<strong>de</strong>ur<br />
T<br />
e<br />
I<br />
K na K i K co<strong>de</strong>ur K m = -2.38 K co<strong>de</strong>ur = 120 /2. impulsion/tr K na = - ref (R601 +R 602 )<br />
16<br />
L'erreur statique en pourcentage s'écrit<br />
1% =<br />
1<br />
K<br />
na<br />
1<br />
K<br />
iK<br />
mK<br />
f<br />
v<br />
co<strong>de</strong>ur<br />
T<br />
e<br />
soit 0,6%<br />
NEV = 0.06 ce qui correspond à 0.06 mm/s<br />
Q17) Calculer en régime établi <strong>la</strong> valeur <strong>du</strong> courant dans le moteur Im, puis <strong>de</strong> Vic et<br />
enfin <strong>la</strong> valeur <strong>de</strong> NEV. Comparer au résultat précé<strong>de</strong>nt. Conclure en tenant<br />
compte <strong>de</strong> <strong>la</strong> nature réelle <strong>de</strong> NEV.<br />
Si <strong>la</strong> vitesse est constante le couple moteur m est égal à fv.<br />
Agnès FOUCHER - Christian VALADE<br />
09/98
Page 22 Référence K 5446 C05<br />
Comme V(p) = 0,848 m(p )/(2 une vitesse <strong>de</strong> 10mm/s (à 0.6% prés), correspond à<br />
une vitesse <strong>de</strong> rotation <strong>de</strong> l'axe <strong>du</strong> moteur <strong>de</strong> 74 rd/s. Donc le couple <strong>de</strong> frottement<br />
visqueux fv. et le couple moteur ont un mo<strong>du</strong>le égal à 0,0074 N.m.<br />
m est égal à Km.Im. Donc pour appliquer le couple moteur <strong>de</strong> 0,0074 N.m <strong>de</strong><br />
manière à compenser juste les frottements visqueux et tourner une vitesse constante, il faut<br />
un courant dans le moteur d'intensité -0,37 A.<br />
Vic sera alors égal à -1.38 V<br />
NEV égal à 0.06 mm/s c'est à dire 6% <strong>de</strong> NVCO (10mm/s)<br />
En réalité comme les gran<strong>de</strong>urs NEV, NVC et NVM sont numérisées, NEV ne peut<br />
qu'être entier.<br />
A cause <strong>de</strong> cette quantification NEV va donc osciller entre <strong>de</strong>ux valeurs, 1 et 0.<br />
Q18) Déterminer <strong>la</strong> valeur initiale <strong>de</strong> NEV et <strong>du</strong> courant dans le moteur au début <strong>de</strong><br />
l'application <strong>de</strong> l'échelon <strong>de</strong> consigne NVC0 égal à 10 en supposant que <strong>la</strong><br />
vitesse initiale <strong>du</strong> moteur est nulle.<br />
La valeur initiale <strong>de</strong> NEVNA est donc NVC0 - 0 soit 10<br />
Ce<strong>la</strong> donne pour NEV un échelon égal <strong>de</strong> 10.<br />
A cause <strong>de</strong> <strong>la</strong> présence <strong>de</strong>s con<strong>de</strong>nsateurs, <strong>la</strong> valeur initiale <strong>de</strong> Vic est égale à<br />
Kna<br />
2<br />
1<br />
NEV ou encore,<br />
Vic (0) = - I ref<br />
16<br />
R<br />
601<br />
NEV = Kna<br />
R<br />
601<br />
R<br />
601<br />
R<br />
602<br />
NEV = 2,12 NEV<br />
En effet, le comportement pour le front rai<strong>de</strong> à t égal à zéro correspond à une<br />
impédance nulle pour les con<strong>de</strong>nsateurs. (On peut auusi se servir <strong>du</strong> théorème <strong>de</strong> <strong>la</strong> valeur<br />
initiale.<br />
L'application numérique donne Vic (0) = -21,2 V<br />
Compte tenu <strong>de</strong> l'alimentation <strong>du</strong> circuit L291, on aura une saturation à -11V environ<br />
puis une limitation <strong>du</strong> courant à -2A par le L292<br />
La présence <strong>de</strong>s con<strong>de</strong>nsateurs permet donc <strong>de</strong> limiter l'amplification lors <strong>de</strong> front<br />
rai<strong>de</strong> et d'éviter une saturation trop importante <strong>de</strong>s composants <strong>de</strong> <strong>la</strong> chaîne directe.<br />
2.2 ETUDE DE LA STABILITE DE LA BOUCLE<br />
Q19) Exprimer <strong>la</strong> fonction <strong>de</strong> transfert en boucle ouverte en fonction <strong>de</strong> Te.<br />
Déterminer <strong>la</strong> valeur <strong>de</strong> <strong>la</strong> marge <strong>de</strong> phase et préciser <strong>la</strong> valeur <strong>de</strong> f odb en boucle<br />
ouverte pour Fe =141, 5 Hz.<br />
Compte tenu <strong>de</strong> <strong>la</strong> valeur <strong>de</strong> i on peut négliger le déphasage apporté par <strong>la</strong> fonction<br />
<strong>de</strong> transfert 1/(1 + p/ i ) par rapport à celui dû à 4 , 2 ou le retard Te. Ce<strong>la</strong> signifie que<br />
CENTRE NATIONAL D’ENSEIGNEMENT A DISTANCE DE VANVES<br />
09/98
Référence K 5446 CO5 Page 23<br />
l’étu<strong>de</strong> qui suit nous con<strong>du</strong>ira à étudier une gamme <strong>de</strong> fréquence nettement inférieure à<br />
f i = i/2 ( on a f i > 700 Hz).<br />
On rappelle que <strong>la</strong> limite <strong>de</strong> validité <strong>du</strong> modèle équivalent analogique utilisé est [0,<br />
Fe/4] soit [0, 35 Hz].<br />
Dans ces conditions, <strong>la</strong> fonction <strong>de</strong> transfert en boucle ouverte s’écrit,<br />
Tbo(p) = e<br />
1<br />
p /<br />
1<br />
K K 2<br />
p / 1 p /<br />
pTe / 2 1<br />
pTe / 2<br />
K na i K p Te<br />
e<br />
1 2<br />
4<br />
k = K p = 120 /0,848 impulsion/mm<br />
K 2 = -K m .(0,848).(2.<br />
/ f v et K na négatif<br />
Tbo(p) =<br />
e<br />
pTe / 2<br />
K<br />
na<br />
1<br />
1<br />
p /<br />
p /<br />
1<br />
2<br />
K<br />
K<br />
i<br />
f<br />
m<br />
v<br />
1<br />
1<br />
p /<br />
4<br />
K<br />
co<strong>de</strong>ur<br />
T<br />
e<br />
e<br />
pTe / 2<br />
K co<strong>de</strong>ur = 120/(2. impulsions/rd<br />
pTe<br />
Tbo(p) = e K T<br />
0<br />
e<br />
1<br />
1<br />
p / 1 1<br />
p / 1 p /<br />
2 4<br />
avec K 0 = - K na K i K co<strong>de</strong>ur K m / f v = (-23,4).(0,267). K co<strong>de</strong>ur K m / f v<br />
K na est négatif. K na K i K co<strong>de</strong>ur K m = -2.38<br />
et K 0 = +2,3 8.10 4 si fv est égal à 10 -4 N.m/s<br />
Pour Te = 7,07ms, l’amplification statique en boucle ouverte est K 0 Te= +168<br />
La courbe <strong>de</strong> gain ne dépend pas <strong>du</strong> terme e -j Te .<br />
La courbe <strong>de</strong> gain coupe l’axe 0 dB pour une pulsation supérieure à 4 , 2 et 1 ,<br />
donc l’amplification dans cette gamme <strong>de</strong> fréquence se met sous <strong>la</strong> forme, se met sous <strong>la</strong><br />
forme<br />
Tbo K 0 T e<br />
2<br />
1<br />
odb = K<br />
2<br />
0 T e<br />
1<br />
4<br />
4 = 100 rd/s et f odb = 16 Hz.<br />
A cette pulsation l’argument <strong>de</strong> K<br />
0<br />
T<br />
e<br />
1<br />
1<br />
p / 1 1<br />
p / 1 p /<br />
2 4<br />
vaut pratiquement /2.<br />
Donc Arg( odb) = - T e . odb - /2<br />
T e . odb = K<br />
2 2<br />
0 T e<br />
1<br />
4<br />
= 0,70 rd ou 40°<br />
La marge <strong>de</strong> phase est alors <strong>de</strong> 50° environ. Cette valeur est tout à fait satisfaisante.<br />
Agnès FOUCHER - Christian VALADE<br />
09/98
Page 24 Référence K 5446 C05<br />
La fréquence f odb est <strong>de</strong> 16 Hz, cette valeur est <strong>la</strong>rgement inférieure à Fe/4 =35 Hz.<br />
Donc les limites <strong>de</strong> validité <strong>du</strong> modèle sont respectées. L’évaluation <strong>de</strong> <strong>la</strong> marge <strong>de</strong> phase<br />
et <strong>de</strong> <strong>la</strong> stabilité en boucle fermée sont va<strong>la</strong>bles.<br />
Q20) Que se passe t-il si on augmente <strong>la</strong> fréquence d’échantillonnage Te?. On<br />
indiquera qualitativement les modifications que l’on pourrait observer sur <strong>la</strong><br />
réponse à un échelon <strong>de</strong> vitesse?<br />
Si on augmente <strong>la</strong> pério<strong>de</strong> d’échantillonnage, <strong>la</strong> stabilité diminue très rapi<strong>de</strong>ment. En<br />
effet d’une part le déphasage apporté par le retard <strong>de</strong> Te augmente et d’autre part<br />
l’amplification statique en boucle ouverte augmente (donc <strong>la</strong> courbe <strong>de</strong> gain « remonte »).<br />
Ces <strong>de</strong>ux effets cumulés con<strong>du</strong>isent à,<br />
- une diminution <strong>de</strong> <strong>la</strong> marge <strong>de</strong> phase (diminution <strong>de</strong> <strong>la</strong> stabilité)<br />
- une diminution <strong>de</strong> <strong>la</strong> pulsation odb pour <strong>la</strong>quelle le gain en boucle ouverte vaut<br />
0 dB ( diminution <strong>de</strong> <strong>la</strong> rapidité en boucle fermée).<br />
Influence <strong>de</strong> <strong>la</strong> diminution <strong>de</strong> Te sur <strong>la</strong> réponse à un échelon.<br />
Le temps <strong>de</strong> montée diminue.<br />
La stabilité <strong>de</strong> <strong>la</strong> boucle est moins bonne donc, le temps <strong>de</strong> réponse ne diminue pas<br />
forcément à cause <strong>de</strong> <strong>la</strong> présence <strong>de</strong> pseudo-oscil<strong>la</strong>tions.<br />
Le coefficient <strong>de</strong> <strong>la</strong> boucle <strong>de</strong> retour dépend <strong>de</strong> Te. La valeur finale obtenue est<br />
donnée par Vitesse = NCV/K v = NCV / K p Te. La valeur <strong>de</strong> <strong>la</strong> vitesse obtenue n’est<br />
plus <strong>la</strong> même pour une même consigne.<br />
Donc, à chaque modification <strong>de</strong> Te, il faudrait ajuster <strong>la</strong> loi d’é<strong>la</strong>boration <strong>de</strong> <strong>la</strong><br />
consigne NCV. La pério<strong>de</strong> d’échantillonnage choisie par le concepteur permet d’avoir une<br />
loi <strong>de</strong> comman<strong>de</strong> simple (NVC = 1 si on veut une vitesse <strong>de</strong> 1 mm/s) et NVC sera toujours<br />
un entier, car <strong>la</strong> vitesse est rég<strong>la</strong>ge par pas <strong>de</strong> 1 mm/s.<br />
Remarques complémentaires : Influence <strong>de</strong>s caractéristiques mécaniques.<br />
On peut constater que si les frottements visqueux augmentent, <strong>la</strong> marge <strong>de</strong> phase<br />
reste inchangée.<br />
Si le moment d’inertie J augmente (changement <strong>de</strong> moulinet par exemple), <strong>la</strong><br />
pulsation odb diminue. La marge <strong>de</strong> phase est alors plus gran<strong>de</strong> et <strong>la</strong> stabilité en boucle<br />
fermée meilleure.<br />
Avec le rég<strong>la</strong>ge choisi pour le correcteur analogique associé au convertisseur<br />
numérique analogique, <strong>la</strong> stabilité est satisfaisante.<br />
A <strong>la</strong> fin <strong>de</strong> <strong>la</strong> phase <strong>de</strong> remontée automatique <strong>du</strong> moulinet, celui-ci doit rester à <strong>la</strong><br />
surface <strong>de</strong> l’eau. On est alors en mo<strong>de</strong> asservissement <strong>de</strong> position (voir le document<br />
support).<br />
Q21) Rappeler l’expression <strong>de</strong> NPM en fonction <strong>de</strong> <strong>la</strong> profon<strong>de</strong>ur. On dit que NPM<br />
représente <strong>la</strong> position absolue. Justifier cette appel<strong>la</strong>tion et expliquer pourquoi<br />
CENTRE NATIONAL D’ENSEIGNEMENT A DISTANCE DE VANVES<br />
09/98
Référence K 5446 CO5 Page 25<br />
on n’utilise pas directement les sorties <strong>de</strong>s compteurs CPMT1 et /ou CMPT2 pour<br />
obtenir <strong>la</strong> valeur <strong>de</strong> <strong>la</strong> profon<strong>de</strong>ur.<br />
Le principe retenu pour obtenir NPM (Nombre représentatif <strong>de</strong> <strong>la</strong> position <strong>du</strong> moulinet)<br />
est qualifié <strong>de</strong> mesure absolue <strong>de</strong> <strong>la</strong> position.<br />
Puisque NPM = NPM[(n-1)Te] + NVM<br />
NVM représentant le dép<strong>la</strong>cement pendant Te.<br />
NVM = K p .(Dép<strong>la</strong>cement pendant Te) avec K p = 141,51mm -1.<br />
NVM = K v .(vitesse) avec K v = 1s/mm .<br />
donc NPM = NPM[(n-1)Te] + K p .(Dép<strong>la</strong>cement pendant Te)<br />
NPM(nTe) représente <strong>la</strong> somme <strong>de</strong>s dép<strong>la</strong>cements <strong>de</strong>puis le moment où NPM a été<br />
initialisé donc <strong>la</strong> position par rapport à <strong>la</strong> surface <strong>de</strong> l’eau. Donc,<br />
NPM (nTe)= K p Profon<strong>de</strong>ur(nTe).<br />
On peut s’étonner <strong>du</strong> principe retenu à savoir NPM = NPM[(n-1)Te] + NVM.<br />
En effet NPM pourrait être obtenu directement à partir <strong>du</strong> nombre d’impulsions <strong>de</strong>s<br />
compteurs par NPM = CMPT2 - CMPT1. Mais dans ce cas, il faut d’une part gérer<br />
matériellement <strong>la</strong> remise à zéro <strong>de</strong>s compteurs pour avoir une référence <strong>de</strong> position.<br />
Pendant cette remise à zéro, on peut perdre le comptage d’une impulsion ce qui con<strong>du</strong>irait<br />
à une erreur sur <strong>la</strong> position. D’autre part, <strong>la</strong> capacité <strong>de</strong>s compteurs ne doit pas être<br />
dépasser sous peine d’erreurs (une gestion <strong>de</strong>s dépassements serait complexe, <strong>du</strong> fait <strong>de</strong><br />
<strong>la</strong> présence <strong>de</strong> <strong>de</strong>ux compteurs indépendants).<br />
Enfin l’utilisation d’un seul compteur en mo<strong>de</strong> décomptage (montée) et comptage<br />
(<strong>de</strong>scente) peut également être envisagé et est plus simple à mettre en œuvre que <strong>la</strong><br />
solution précé<strong>de</strong>nte. Dans ce cas, il faudrait également prévoir <strong>de</strong>s remises à zéro<br />
matérielles <strong>du</strong> compteur pour avoir une référence <strong>de</strong> position. Mais surtout <strong>la</strong> position<br />
maximale mesurable est alors limitée par <strong>la</strong> capacité <strong>du</strong> compteur sauf gestion <strong>de</strong>s<br />
dépassements. Pour un compteur <strong>de</strong> 16 bits, <strong>la</strong> valeur maximale <strong>de</strong> <strong>la</strong> profon<strong>de</strong>ur serait<br />
32 535.0,848/120 =463,12 mm ce qui est insuffisant.<br />
Dans <strong>la</strong> structure retenue par le concepteur, <strong>la</strong> valeur maximale <strong>de</strong> <strong>la</strong> profon<strong>de</strong>ur est<br />
fixée par <strong>la</strong> capacité d’une variable logicielle (ici 32 bits) et <strong>la</strong> solution est re<strong>la</strong>tivement<br />
simple à mettre en œuvre tant d’un point <strong>de</strong> vue matériel que d’un point <strong>de</strong> vue logiciel.<br />
En conséquence, on retiendra que dans beaucoup <strong>de</strong> systèmes assurant un contrôle<br />
<strong>de</strong> <strong>la</strong> position par <strong>de</strong>s métho<strong>de</strong>s numériques, le principe retenu est un calcul <strong>de</strong> <strong>la</strong> position<br />
absolue par :<br />
NPM (nTe) = NPM[(n-1)Te] + image dép<strong>la</strong>cement pendant Te.<br />
NVM = image <strong>du</strong> dép<strong>la</strong>cement pendant Te<br />
Cette opération qui permet à partir d’une image <strong>de</strong> <strong>la</strong> vitesse NVM <strong>de</strong> calculer <strong>la</strong><br />
position correspond à ce que l’on appelle une « intégration numérique ».<br />
Agnès FOUCHER - Christian VALADE<br />
09/98
Page 26 Référence K 5446 C05<br />
Q22) Rappeler l’expression <strong>de</strong> NEV en fonction <strong>de</strong> NPM en mo<strong>de</strong> asservissement <strong>de</strong><br />
position. Compléter <strong>la</strong> représentation analogique équivalente proposée ci<strong>de</strong>ssous<br />
et faisant apparaître <strong>de</strong>ux boucles imbriquées, une boucle <strong>de</strong> vitesse<br />
dans une boucle <strong>de</strong> position. On notera NVC = (NPC -NPM)/16.<br />
NEV = (NPC -NPM)/16 - NVM<br />
avec NPC égal à zéro, car l’asservissement <strong>de</strong> position doit en fait uniquement servir<br />
<strong>de</strong> régu<strong>la</strong>tion <strong>de</strong> <strong>la</strong> position à <strong>la</strong> surface <strong>de</strong> l’eau c’est à dire pour <strong>la</strong> position zéro.<br />
NPM (nTe)= K p Profon<strong>de</strong>ur. avec K p = 141,51mm -1<br />
En notant NVC = (NPC -NPM)/16, on obtient <strong>la</strong> représentation,<br />
NPC NVC NEVNA NEV Vitesse Profon<strong>de</strong>ur<br />
+ 1/16 + (mm/s) 1/p (mm)<br />
- -<br />
Profon<strong>de</strong>ur<br />
NPM KpTe p e -pTe/2 1/p<br />
Kp<br />
NPM Kp Profon<strong>de</strong>ur<br />
K 6 = 0,848/2 mm/rd et K p = 120/0,848 = 141,51 impulsion/mm<br />
D’autres variantes sont possibles. Par exemple si on utilise comme variable <strong>la</strong> vitesse<br />
sur l’axe <strong>du</strong> moteur (en rd/s),<br />
NPC NVC NEVNA NEV Vitesse Profon<strong>de</strong>ur<br />
+ 1/16 + (rd/s) K 6 /p (mm)<br />
Posrel<br />
NPM T e p e -pTe/2 K co<strong>de</strong>ur /p<br />
K p<br />
K co<strong>de</strong>ur = 120/2 impulsion/rd<br />
Les conditions <strong>de</strong> validité <strong>de</strong> ces modèles imposent une étu<strong>de</strong> pour les fréquences<br />
inférieures à Fe/4.<br />
Q23) On remp<strong>la</strong>cera <strong>la</strong> boucle <strong>de</strong> vitesse par un équivalent analogique en boucle<br />
fermée, H v (p) = Vitesse(p)/NVC(p) Proposer un modèle analogique équivalent à<br />
l’ensemble <strong>de</strong> <strong>la</strong> boucle <strong>de</strong> position et faisant apparaître une seule boucle.<br />
H v (p) = H v0 /(1 + 2mp/ v + p²/ ² v )<br />
avec H v0 = 1/K p Te =120/0,848/Te), v =100rd/s et m=0.5<br />
CENTRE NATIONAL D’ENSEIGNEMENT A DISTANCE DE VANVES<br />
09/98
Référence K 5446 CO5 Page 27<br />
NPC NVC Vitesse Profon<strong>de</strong>ur<br />
+ 1/16 H vo / (1+2mp/ v+p²/ v² (mm/s) 1/p (mm)<br />
-<br />
NPM K p Profon<strong>de</strong>ur<br />
La boucle <strong>de</strong> vitesse étant stable, <strong>la</strong> stabilité <strong>de</strong> <strong>la</strong> boucle <strong>de</strong> position peut être<br />
étudiée <strong>de</strong> manière c<strong>la</strong>ssique à partir <strong>du</strong> modèle ci-<strong>de</strong>ssus. On obtient une marge <strong>de</strong> phase<br />
supérieure à 80°. La présence d’un intégrateur dans <strong>la</strong> chaîne directe permet <strong>de</strong> garantir<br />
une erreur statique nulle.<br />
Q24) Expliquer qualitativement le rôle <strong>du</strong> facteur <strong>de</strong> division 1/16 intervenant dans le<br />
calcul <strong>de</strong> NEV et l’intérêt d’avoir une boucle <strong>de</strong> vitesse imbriquée dans <strong>la</strong> boucle<br />
<strong>de</strong> position.<br />
Le coefficient 1/16 joue le rôle <strong>de</strong> correcteur proportionnel et permet <strong>de</strong> régler les<br />
performances <strong>de</strong> <strong>la</strong> boucle (stabilité, précision). Ce coefficient est choisi sous forme d’une<br />
puissance <strong>de</strong> 2 <strong>de</strong> manière à pouvoir obtenir une structure logicielle simple et s’exécutant<br />
rapi<strong>de</strong>ment.<br />
La boucle <strong>de</strong> vitesse s’apparente à un type <strong>de</strong> <strong>correction</strong> que l’on appelle « <strong>correction</strong><br />
tachymétrique » ou <strong>correction</strong> « par retour dérivé », car elle utilise <strong>la</strong> dérivée (vitesse) <strong>de</strong> <strong>la</strong><br />
gran<strong>de</strong>ur <strong>de</strong> sortie (ici <strong>la</strong> position). elle permet <strong>de</strong> régler <strong>la</strong> fonction <strong>de</strong> transfert <strong>de</strong> <strong>la</strong> chaîne<br />
directe.<br />
En fait, c’est un asservissement interne <strong>de</strong> vitesse. La vitesse est gran<strong>de</strong> lorsque l’on<br />
est loin <strong>de</strong> <strong>la</strong> position souhaitée, mais <strong>la</strong> consigne <strong>de</strong> vitesse diminue lorsque l’on<br />
s’approche <strong>de</strong> <strong>la</strong> position finale. Correctement réglé, ce<strong>la</strong> permet d’éviter <strong>de</strong>s oscil<strong>la</strong>tions<br />
intempestives et <strong>de</strong> stabiliser l’asservissement en gardant toutefois <strong>de</strong>s bonnes<br />
performances dynamiques.<br />
Agnès FOUCHER - Christian VALADE<br />
09/98