MECANIQUE : TD n°6 - Les CPGE de Loritz
MECANIQUE : TD n°6 - Les CPGE de Loritz
MECANIQUE : TD n°6 - Les CPGE de Loritz
- No tags were found...

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
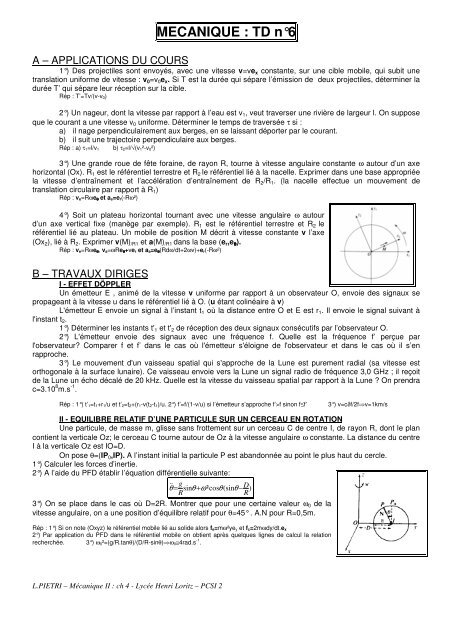
<strong>MECANIQUE</strong> : <strong>TD</strong> n°6A – APPLICATIONS DU COURS1°) Des projectiles sont envoyés, avec une vitesse v=ve x constante, sur une cible mobile, qui subit unetranslation uniforme <strong>de</strong> vitesse : v 0 =v 0 e x . Si T est la durée qui sépare l’émission <strong>de</strong> <strong>de</strong>ux projectiles, déterminer ladurée T’ qui sépare leur réception sur la cible.Rép : T’=Tv/(v-v 0)2°) Un nageur, dont la vitesse par rapport à l’eau est v 1 , veut traverser une rivière <strong>de</strong> largeur l. On supposeque le courant a une vitesse v 0 uniforme. Déterminer le temps <strong>de</strong> traversée τ si :a) il nage perpendiculairement aux berges, en se laissant déporter par le courant.b) il suit une trajectoire perpendiculaire aux berges.Rép : a) τ 1=l/v 1 b) τ 2=l/√(v 1²-v 0²)3°) Une gran<strong>de</strong> roue <strong>de</strong> fête foraine, <strong>de</strong> rayon R, tourne à vitesse angulaire constante ω autour d’un axehorizontal (Ox). R 1 est le référentiel terrestre et R 2 le référentiel lié à la nacelle. Exprimer dans une base appropriéela vitesse d’entraînement et l’accélération d’entraînement <strong>de</strong> R 2 /R 1 . (la nacelle effectue un mouvement <strong>de</strong>translation circulaire par rapport à R 1 )Rép : v e=Rωe θ et a e=e r(-Rω²)4°) Soit un plateau horizontal tournant avec une vitesse angulaire ω autourd’un axe vertical fixe (manège par exemple). R 1 est le référentiel terrestre et R 2 leréférentiel lié au plateau. Un mobile <strong>de</strong> position M décrit à vitesse constante v l’axe(Ox 2 ), lié à R 2 . Exprimer v(M) /R1 et a(M) /R1 dans la base (e r ,e θ ).Rép : v e=Rωe θ, v a=ωRe θ+ve r et a a=e θ(Rdω/dt+2ωv)+e r(-Rω²)B – TRAVAUX DIRIGESI - EFFET DÖPPLERUn émetteur E , animé <strong>de</strong> la vitesse v uniforme par rapport à un observateur O, envoie <strong>de</strong>s signaux sepropageant à la vitesse u dans le référentiel lié à O. (u étant colinéaire à v)L'émetteur E envoie un signal à l’instant t 1 où la distance entre O et E est r 1 . Il envoie le signal suivant àl'instant t 2 .1°) Déterminer les instants t' 1 et t' 2 <strong>de</strong> réception <strong>de</strong>s <strong>de</strong>ux signaux consécutifs par l’observateur O.2°) L'émetteur envoie <strong>de</strong>s signaux avec une fréquence f. Quelle est la fréquence f’ perçue parl'observateur? Comparer f et f’ dans le cas où l'émetteur s'éloigne <strong>de</strong> l'observateur et dans le cas où il s’enrapproche.3°) Le mouvement d'un vaisseau spatial qui s'approche <strong>de</strong> la Lune est purement radial (sa vitesse estorthogonale à la surface lunaire). Ce vaisseau envoie vers la Lune un signal radio <strong>de</strong> fréquence 3,0 GHz ; il reçoit<strong>de</strong> la Lune un écho décalé <strong>de</strong> 20 kHz. Quelle est la vitesse du vaisseau spatial par rapport à la Lune ? On prendrac=3.10 8 m.s -1 .Rép : 1°) t’ 1=t 1+r 1/u et t’ 2=t 2+(r 1-v(t 2-t 1)/u. 2°) f’=f/(1-v/u) si l’émetteur s’approche f’>f sinon f≤f’3°) v=cδf/2f⇒v=1km/sII - EQUILIBRE RELATIF D’UNE PARTICULE SUR UN CERCEAU EN ROTATIONUne particule, <strong>de</strong> masse m, glisse sans frottement sur un cerceau C <strong>de</strong> centre I, <strong>de</strong> rayon R, dont le plancontient la verticale Oz; le cerceau C tourne autour <strong>de</strong> Oz à la vitesse angulaire ω constante. La distance du centreI à la verticale Oz est IO=D.On pose θ=(IP 0 ,IP). A l’instant initial la particule P est abandonnée au point le plus haut du cercle.1°) Calculer les forces d’inertie.2°) A l’ai<strong>de</strong> du PFD établir l’équation différentielle suivante:&& gθ= sin θ + ω²cos θ(sin θ −D)RR3°) On se place dans le cas où D=2R. Montrer que pour une certaine valeur ω 0 <strong>de</strong> lavitesse angulaire, on a une position d’équilibre relatif pour θ=45° . A.N pour R=0,5m.Rép : 1°) Si on note (Oxyz) le référentiel mobile lié au soli<strong>de</strong> alors f e=mω²ye y et f c=2mωdy/dt.e x2°) Par application du PFD dans le référentiel mobile on obtient après quelques lignes <strong>de</strong> calcul la relationrecherchée. 3°) ω 0²=(g/R.tanθ)/(D/R-sinθ)⇒ω 0≅4rad.s -1 .L.PIETRI – Mécanique II : ch 4 - Lycée Henri <strong>Loritz</strong> – PCSI 2
III - PARTICULE DANS UN ANNEAU EN ROTATIONUn cercle matériel (C) <strong>de</strong> centre C et <strong>de</strong> rayon R=0,25m est mis en rotationuniforme par rapport au référentiel terrestre R supposé galiléen à la vitesseangulaire constante positive Ω autour d’un diamètre vertical AO qui matérialisel’axe vertical <strong>de</strong>scendant Ox. Un petit anneau M assimilable à un point matériel Mcoulisse sur (C) et est repéré par le paramètre angulaire θ=(Cx,CM) à l’instant t.1°) On pose ω 0 ²=g/R & λ=Ω²/ω 0 ². A l’ai<strong>de</strong> <strong>de</strong> la conservation <strong>de</strong> l’énergiemécanique, écrire l’équation différentielle du mouvement sous la forme:(d²θ/dt²)=ω o ²f(θ) où f(θ)=sinθ(λcosθ-1)2°) Retrouver les positions d’équilibres stables. Pour cela on pourra poseru(θ)=E p (θ)/mgR et ainsi utiliser la propriété que u’(θ)=-f(θ).3°) Vérifier les résultats obtenus sur la représentation graphique ci-<strong>de</strong>ssous:Rép : 1°) On calcule E k=1/2mR²(dθ/dt)² et E p=-1/2mΩ²R²sin²θ+(1-cosθ)mgR (origine <strong>de</strong>s potentiels priseen O)2°) Pour λ1 c’est θ=±Arccos(1/λ)3°) On vérifie bien le changement <strong>de</strong> stabilité pour θ=0PUITS DE POTENTIEL2,521,51u( )0,50-3,4 -3 -2,6 -2,2 -1,8 -1,4 -1 -0,6 -0,2 0,2 0,6 1 1,4 1,8 2,2 2,6 3 3,4-0,5λ =5λ =1λ =0,25-1-1,5-2[θ ]/ radC – EXERCICES SUPPLEMENTAIRESI- MOUVEMENT CYCLOÏDAL – POINT COÏNCIDENTUne automobile se déplace d’un mouvement uniforme <strong>de</strong> vitesse v sur une route horizontale dirigéesuivant l’axe Ox du référentiel R : OXYZ, où OZ est la verticale ascendante. On admettra que les pneus roulentsans glisser sur la route. On considérera le référentiel R’ Oxyz lié à une <strong>de</strong>s roues <strong>de</strong> centre O, <strong>de</strong> rayon R, etdont les axes sont parallèles à ceux <strong>de</strong> R.0°) On a déjà vu x=R(ωt-sin(ωt)) & y=R(1-cos(ωt)) (Cf <strong>TD</strong>1 Ex : B-3)1°) Déterminer la gran<strong>de</strong>ur et la direction, par rapport à la route, <strong>de</strong> la vitesse <strong>de</strong> M, à l’instant t ,parrapport à R et par rapport à R’. Faîtes la représentation vectorielle traduisant la loi <strong>de</strong> composition <strong>de</strong>s vitesses<strong>de</strong> M.2°) Montrer que le support <strong>de</strong> la vitesse v <strong>de</strong> M, dans R, passe à chaque instant par le point I’,diamétralement opposé au point <strong>de</strong> contact I du pneu avec le sol.3°) Déterminer dans R l’accélération <strong>de</strong> M, le rayon <strong>de</strong> courbure R c , et la position du centre <strong>de</strong> courbure.Rép : 1°) Par rapport à R : v=2Rω⏐sin(ωt/2)⏐ et α=⏐π-ωt⏐/2 et par rapport à R’ : v=Rω et ⏐β⏐=2α 2°) IM.v a=0 ⇒ le support <strong>de</strong> vpasse par I’ 3°) R c=4R⏐sin(ωt/2)⏐ et MΩ=2MI.L.PIETRI – Mécanique II : ch 4 - Lycée Henri <strong>Loritz</strong> – PCSI 2