

Problèmes sur l'oscillateur harmonique
Problèmes sur l'oscillateur harmonique
Problèmes sur l'oscillateur harmonique

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
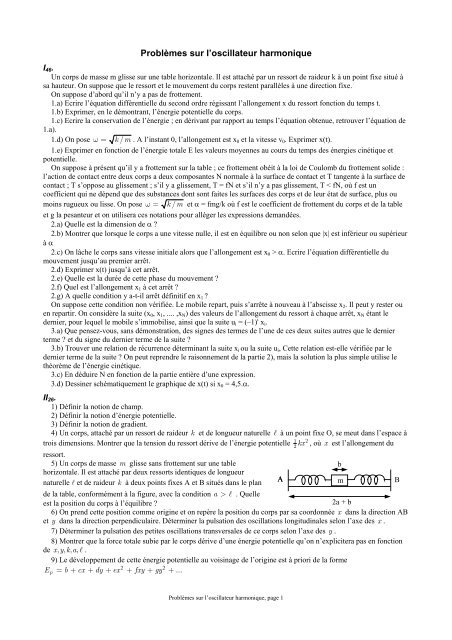
Problèmes <strong>sur</strong> l’oscillateur <strong>harmonique</strong>I 46 .Un corps de masse m glisse <strong>sur</strong> une table horizontale. Il est attaché par un ressort de raideur k à un point fixe situé àsa hauteur. On suppose que le ressort et le mouvement du corps restent parallèles à une direction fixe.On suppose d’abord qu’il n’y a pas de frottement.1.a) Ecrire l’équation différentielle du second ordre régissant l’allongement x du ressort fonction du temps t.1.b) Exprimer, en le démontrant, l’énergie potentielle du corps.1.c) Ecrire la conservation de l’énergie ; en dérivant par rapport au temps l’équation obtenue, retrouver l’équation de1.a).1.d) On pose ω = k/m . A l’instant 0, l’allongement est x 0 et la vitesse v 0 . Exprimer x(t).1.e) Exprimer en fonction de l’énergie totale E les valeurs moyennes au cours du temps des énergies cinétique etpotentielle.On suppose à présent qu’il y a frottement <strong>sur</strong> la table ; ce frottement obéit à la loi de Coulomb du frottement solide :l’action de contact entre deux corps a deux composantes N normale à la <strong>sur</strong>face de contact et T tangente à la <strong>sur</strong>face decontact ; T s’oppose au glissement ; s’il y a glissement, T = fN et s’il n’y a pas glissement, T < fN, où f est uncoefficient qui ne dépend que des substances dont sont faites les <strong>sur</strong>faces des corps et de leur état de <strong>sur</strong>face, plus oumoins rugueux ou lisse. On pose ω = k/m et α = fmg/k où f est le coefficient de frottement du corps et de la tableet g la pesanteur et on utilisera ces notations pour alléger les expressions demandées.2.a) Quelle est la dimension de α ?2.b) Montrer que lorsque le corps a une vitesse nulle, il est en équilibre ou non selon que |x| est inférieur ou supérieurà α2.c) On lâche le corps sans vitesse initiale alors que l’allongement est x 0 > α. Ecrire l’équation différentielle dumouvement jusqu’au premier arrêt.2.d) Exprimer x(t) jusqu’à cet arrêt.2.e) Quelle est la durée de cette phase du mouvement ?2.f) Quel est l’allongement x 1 à cet arrêt ?2.g) A quelle condition y a-t-il arrêt définitif en x 1 ?On suppose cette condition non vérifiée. Le mobile repart, puis s’arrête à nouveau à l’abscisse x 2 . Il peut y rester ouen repartir. On considère la suite (x 0 , x 1 , .... ,x N ) des valeurs de l’allongement du ressort à chaque arrêt, x N étant ledernier, pour lequel le mobile s’immobilise, ainsi que la suite u i = (–1) i x i .3.a) Que pensez-vous, sans démonstration, des signes des termes de l’une de ces deux suites autres que le dernierterme ? et du signe du dernier terme de la suite ?3.b) Trouver une relation de récurrence déterminant la suite x i ou la suite u i , Cette relation est-elle vérifiée par ledernier terme de la suite ? On peut reprendre le raisonnement de la partie 2), mais la solution la plus simple utilise lethéorème de l’énergie cinétique.3.c) En déduire N en fonction de la partie entière d’une expression.3.d) Dessiner schématiquement le graphique de x(t) si x 0 = 4,5.α.II 26 .1) Définir la notion de champ.2) Définir la notion d’énergie potentielle.3) Définir la notion de gradient.4) Un corps, attaché par un ressort de raideur k et de longueur naturelle à un point fixe O, se meut dans l’espace àtrois dimensions. Montrer que la tension du ressort dérive de l’énergie potentielleressort.5) Un corps de masse m glisse sans frottement <strong>sur</strong> une tablehorizontale. Il est attaché par deux ressorts identiques de longueurnaturelle et de raideur k à deux points fixes A et B situés dans le plan122kx , où x est l’allongement dude la table, conformément à la figure, avec la condition a > . Quelleest la position du corps à l’équilibre ?2a + b6) On prend cette position comme origine et on repère la position du corps par sa coordonnée x dans la direction ABet y dans la direction perpendiculaire. Déterminer la pulsation des oscillations longitudinales selon l’axe des x .7) Déterminer la pulsation des petites oscillations transversales de ce corps selon l’axe des y .8) Montrer que la force totale subie par le corps dérive d’une énergie potentielle qu’on n’explicitera pas en fonctionde xyka , , , , .9) Le développement de cette énergie potentielle au voisinage de l’origine est à priori de la forme2 2Ep= b + cx + dy + ex + fxy + gy + ...AbmBProblèmes <strong>sur</strong> l’oscillateur <strong>harmonique</strong>, page 1
On néglige les termes d’ordre supérieur. En donnant des arguments précis utilisant par exemple la symétrie de la figure,montrer que c = 0, d = 0, f = 0.10) Déterminer e et g . Le plus simple est d’utiliser les études des oscillations longitudinales et transversales qui ontdéjà été faites.11) En déduire l’expression de la force totale subie par le mobile au voisinage de l’origine à l’approximation linéaire.12) En déduire les équations différentielles régissant les petites oscillations du corps.13) En déduire la loi horaire de petites oscillations du corps au voisinage de l’origine.14) A quelle condition la trajectoire se referme-t-elle après deux oscillations dans le sens des x et une oscillationdans le sens des y ?III.A 77 .1) Exprimer, sans démonstration, un déplacement élémentaire quelconque d’un mobile de coordonnées polaires r,θ(élémentaire signifie linéaire par rapport à des différentielles) <strong>sur</strong> la base formée par le vecteur unitaire radial u r et levecteur unitaire orthoradial u θ . 2) Un mobile est soumis à une force radiale F = F(). r u r dont la grandeur ne dépend que de la coordonnée r .Montrer qu’il existe une énergie potentielle associée à cette force que l’on peut exprimer à l’aide de la primitive deFr ().3) Un mobile dans l’espace à deux dimensions est attaché à un point fixe O par un ressort de masse négligeable, deraideur k et de longueur naturelle . Montrer qu’il existe une énergie potentielle associée à la tension du ressort etexprimer cette énergie potentielle en fonction de la distance r = OM .B 37 .Un anneau M de masse m coulisse sans frottement <strong>sur</strong> un axe horizontalAOx. Il est lié à un point fixe A par un ressort de masse négligeable, de raideurk et de longueur naturelle . OA est perpendiculaire à Ox et de longueur a .k, La position du point M est repérée par son abscisse x <strong>sur</strong> l’axe Ox.a1) Quelle est la pulsation ω0des oscillations si a = 0 ?2) On suppose dorénavant a ≠ 0 . Montrer qu’il existe une énergiexpotentielle E p associée à la force totale subie par M et exprimer cette énergieO Mpotentielle.⎛⎞3) Montrer que la force subie par le mobile est F kx= − ⎜1− .⎜⎝ 2 2a + x ⎠⎟2dF⎡a⎤On pourra utiliser par la suite : k= − 1dx −2 2 3/2.⎢⎣ ( a + x ) ⎥⎦4) Discuter le nombre des positions d’équilibre et leur stabilité et exprimer leurs abscisses x si a ≠ .5) Tracer schématiquement le graphe de x / pour les positions d’équilibre stable en fonction de a / .eqExprimer en fonction de ω 0 et de a / la pulsation ω des petites oscillations près d’une position d’équilibre stable :6) si a > ;dF7) si a < . On pourra considérer ( x = xeq ).dx8) Tracer schématiquement le graphe de ω/ω 0 en fonction de a / .9) M étant dans une position d’équilibre stable, on lui applique une petite force δF . La position d’équilibre seδx eq1déplace de δx eq . On appelle susceptibilité le rapport χ = . Montrer que χ = .δ F2m ω10) Tracer schématiquement le graphe de k χ en fonction de a / .11) Pour me<strong>sur</strong>er des forces, on peut utiliser un dispositif semblable fonctionnant au voisinage de a = . Quel estl’intérêt de le régler au voisinage de a = ?C 28 .On s’intéresse dorénavant aux petites oscillations dans le cas a = .1) Quelle est alors la position d’équilibre stable ?α2) En utilisant le développement de ( 1+ ε) ≈ 1+ αε jusque cet ordre, trouver une expression approximativesimple de la force quand x est petit. En déduire une expression approximative de l’énergie potentielle.3) En utilisant cette expression, exprimer la conservation de l’énergie si l’amplitude des oscillations est x m .4) En déduire une équation différentielle du premier ordre à variables séparables reliant le temps t et l’abscisse x .Problèmes <strong>sur</strong> l’oscillateur <strong>harmonique</strong>, page 2eqx
1 dx5) Exprimer la période des petites oscillations. On donne ∫ = 1, 31 .0 41 − x6) Application numérique : m = 10 kg ; k = 490 N/m ; a = = 15 cm ;a) x m = 1cm ;b) x m = 2cm.7) En quoi cette période se comporte-t-elle différemment de celle d’un oscillateur <strong>harmonique</strong> ?IV 45 . Oscillateur.On prend g = 10 m.s –2 .Le système ci-contre comporte deux ressorts semblables, de raideur k = 500 N/met de longueur naturelle b = 0,08 m, attachés à un corps mobile de masse m = 0,1kg et à deux points fixes. Le corps glisse sans frottement <strong>sur</strong> un plan horizontal etson mouvement est guidé, de sorte que le corps se meut parallèlement aux ressorte.2a + c = 0,22 m1) Quelles sont les tensions des ressorts à l’équilibre ?2) Soit x le déplacement vers la droite du corps à partir de cette position. Dans la suite de ce problème, on compterapositivement vers la droite (ou vers le bas) les grandeurs algébriques. Montrer que la force F subie par le corps est de laforme F = –k’x et exprimer k’.3) A partir de la position d’équilibre, on donne à l’instant 0 une pichenette au corps, de sorte qu’il part vers la droite àla vitesse v 0 = 3 m/s. Exprimer littéralement et numériquement x en fonction du temps t et des autres données.4) Au bout de combien de temps le corps revient-il à sa position de départ ? Quelle est alors sa vitesse ?5) Le système précédent étant à l’équilibre, on le bloque, on le bascule à la verticale et on le libère. Quelserait alors la position d’équilibre du corps ?6) Comme le corps n’est pas lorsqu’on le débloque dans un état d’équilibre, il se met en mouvement.Exprimer la force qu’il subit et l’énergie potentielle associée en fonction de son abscisse X par rapport à saposition d’équilibre.7) Quelle est l’équation différentielle du mouvement ?8) Quelle est sa période ?9) Quelles sont ses positions extrêmes ?10) A partir du point le plus bas atteint par le corps, un opérateur exerce <strong>sur</strong> le corps une force F op telle qu’aubout d’un certain temps le corps est immobile à sa position d’équilibre. Proposer un exemple simple de loigouvernant F op .11) Calculer le travail W op de cette force.12) Que se passe-t-il si la force exercée par l’opérateur a un travail égal à l’opposé de la valeur précédente ?V. Étude d'un système masse-ressort.On se place dans le repère (R) (O x y z) orthonormé, direct, galiléen, dvecteurs unitaires de base i e, j, k. L e système envisagé est constitué d'unressort R, d'un demi cercle C et d'une perle P. Le ressort R est partait,c'est-à-dire de masse négligeable et développant selon sa propre directionune force proportionnelle à son élongation. On note K ce coefficient deproportionnalité et la longueur à vide de R. Le demi cercle (fixe dansc = 0,02 m(R)) C, de rayon a, de centre O, est contenu dans le demi plan xOy, x ≥ 0,supposé vertical, Ox étant la verticale descendante. On assimile la perle P àun point matériel de masse m a streint à se déplacer sans frottement <strong>sur</strong> C.Le ressort R a une extrémité liée à P et l'autre à un point Ω situé aux cotes x = – a, y = 0, z = 0 de (R). La position de P dans (R) est repérée par l'angle θ = ( iOP , ) , θ∈[ −π/2, π /2]. On note u le vecteur unitairede OP , v le vecteur unitaire déduit de u par la rotation de + π/2autour de k . Le système est placé dans le champde pesanteur d'accélération g = gide module g constant.A 77 . Introduction.1. Exprimer la longueur PΩ en fonction de a et θ .2. Exprimer la tension T du ressort en fonction de a, K, et θ .3. Donner l'expression de la vitesse V de P dans (R) en fonction de a et θ .4. Quelles sont les forces appliquées au mobile ? Montrer qu’il existe une énergie potentielle associée à la force totaleet exprimer cette énergie potentielle E p .5. En déduire, lorsque le mouvement de P a lieu, son équation différentielle en fonction de a, gK , , ,mθθ , , .mmProblèmes <strong>sur</strong> l’oscillateur <strong>harmonique</strong>, page 3
B 19 . Etude des positions d’équilibres.6. Déterminer l'expression des positions d'équilibre θ = θ i envisageables pour le système.7. On veut imposer l'existence d'une position d'équilibre pour une valeur θ 1 ≠ 0 de θ comprise entre 0 et π/2 (cequi implique par symétrie une position équivalente – θ1 entre 0 et −π /2). Écrire les inégalités que cela implique <strong>sur</strong> lepoids mg . Donner une interprétation physique de ces conditions.8. Ces conditions étant réalisées, étudier la stabilité des équilibres ainsi obtenus.C 5 . Étude d'un cas particulier.On se donne ici les relations entre paramètres suivants : K = 2 mg/a et = 3 a /29. Vérifier que les conditions établies à la question 7 sont réalisées. Expliciter les positions d'équilibre. Sont-ellesstables ?10. Pour étudier les petits mouvements autour de la position d'équilibre θ 1 , on pose θ = θ 1 + ε. Établir l'équation2différentielle linéaire en ε de ces petits mouvements. On posera ω = K/m , où ω est la pulsation naturelleintrinsèque du système masse-ressort libre.dεKa −mg 11. Peut-on utiliser le résultat précédent pour les conditions initiales ε ( 0)= 0,( 0) = ε 0 =?dt2maDécrire qualitativement le mouvement.12. Soient les valeurs numériques : g = 9,81 rn.s –2 , K = 10 3 N.m –1 , m = 1 kg. Calculer la constante K’ du ressortdonnant la même pulsation naturelle en régime de vibrations libres que celle obtenue à la question 10. Interpréterphysiquement.13. Calculer la longueur L du pendule simple synchrone équivalent. Interpréter le rôle de a.D 14 . Approche complémentaire.14. Donner, dans le repère (R) l'expression du moment cinétique σ0de la masse m par rapport à 0 en fonction de a,m et θ .15. Donner en fonction de F θ , composante orthoradiale de la force totale, l'expression du produit vectoriel OP ∧ F.16. En déduire, par application du théorème du moment cinétique, l'expression de l'équation différentielle dumouvement de P.VI 15 .Un cercle de centre O et de rayon R est situé dans un plan vertical. Soit A son point le plus bas, B son point le plushaut. Une bille pesante M de masse m assimilable à un point matériel coulisse sans frottement <strong>sur</strong> ce cercle. On repèresa position par l’angle θ = ( OB,OM) que OM fait avec la verticale. La bille est reliée au point A par deux ressortscourbes semblables qui exercent <strong>sur</strong> M des forces tangentes au cercle et d’intensités égales au produit d’une constante,leur raideur k , par leur allongement, qui est la différence entre la longueur de l’arc de cercle AM et la longueurnaturelle commune L de ces ressorts.1) On appelle sinus cardinal la fonction y = sinc ( x ) définie parBMsinsinc( xx = )si x ≠ 0 et sinc( 0)= 1. Montrer que cette fonctionxest décroissante pour 0 ≤ x ≤ π. Tracer son graphique pour−π ≤ x ≤ π .θ2) Exprimer la composante orthoradiale f de la force totale qui agit<strong>sur</strong> la bille.3.a) Montrer que B est une position d’équilibre.ODiscuter sa stabilité :3.b) si 2kR > mg ;3.c) si 2 kR < mg ;3.d) si 2kR = mg .4) Exprimer la pulsation des petites oscillations au voisinage de B.A5) Discuter l’existence d’autres positions d’équilibre. On notera θ 0 la2kRracine, si elle existe, de sinc θ 0 = .mg6) Discuter la stabilité de ces positions d’équilibre.7) Exprimer la période des petites oscillations au voisinage de ces positions d’équilibre.8) On étudie les petites oscillations si 2 kR = mg .3mgθx8.a) Montrer que f − en utilisant s in x ≈ x − + ....668.b) Exprimer approximativement l’énergie potentielle associée à f .Problèmes <strong>sur</strong> l’oscillateur <strong>harmonique</strong>, page 43
8.c) En déduire une expression de la vitesse angulaire en fonction de θ et de son amplitude θm.8.d) Exprimer la période en fonction de θ m et de l’intégrale non exprimable à l’aide des fonctions élémentaires1 dxI = ∫ 1, 311029 .0 41 − x9) Appliquons à M une petite force supplémentaire F indépendante du temps et tangente au cercle ; soit ∆θ le petit∆θdéplacement de la position d’équilibre stable que F provoque. On appelle susceptibilité la quantité χ = .F19.a) Montrer que χ = −.df( θéquilibre)dθExprimer χ en fonction de kRmgθ , , , , 0 :9.b) si 2kR > mg ;9.c) si 2 kR < mg .9.d) Si on se sert de ce système pour me<strong>sur</strong>er les variations de la pesanteur, quel est l’intérêt de choisir mg voisin de2kR ? Une me<strong>sur</strong>e est-elle rapide ?Réponses1I. 1.a) mx 2= −kx ; 1.b) Ep= kx ; 1.d)2v0Ex = x0 cos ω t + sin ωt; 1.e) Ep= Ec= ;ω22.a) longueur ; 2. c) mx + kx = fmg ; 2.d)x = α + ( x 0 −α)cos ωt ; 2.e) π ω ; 2.f) x = 2α−x; 2.g)/ 1 01 iα < x 0 ≤ 3α ; 3.a) x i est une suite alternée etui= ( − ) x i est unesuite de signe constant, sauf pour leur dernier terme, de signeindéterminé ; 3.b) ui+ 1 − u i = −α 2 valable jusqu’au dernier terme ;x 0 + α3.c) N est la partie entière de2α .II. 1) Un champ est une fonction de la position d’un point ; 2) L’énergie potentielle associée à une loi de force est lafonction de la position, si elle existe, dont la variation est égale à l’opposé du travail de la force ; 3) Si f est un champ ∂f ∂f ∂fscalaire, fonction des coordonnées cartésiennes xy , ,z d’un point, gradf = ux + uy + uz; 5) le milieu de∂x ∂y ∂z2k2 kAB ; 6) ω x = ; 7) ω y = (1 − / a ) ; 10) e = k ; g = k(1 − / a); 11) Tx= −2k x ;mmTy= −2(1 k − / a)y ; 12) mx = − 2kx my = −2 k(1− / a)y ; 13) x = xmcos( ω xt+ ϕx);y = ymcos( ω yt+ ϕy); 14) ω x = 2ωy3a⇒ = .4III.IV.V.VI. 2) f () θ = mg sinθ−2kRθ ; 3.b) stable ; 3.c) instable ; 3.d) stable ; 4)2kR − mgω = ; 5) si 2 kR < mg , deux autres positions d’équilibre, θ = θ0etmR8 3R1 dxθ = −θ 0 ; 6) stables ; 7) T = 1; 9.b)0 4m g ∫ θ 1 − xχ =2kR − mg;19.c) χ =; 9.d) système très sensible ; une me<strong>sur</strong>e prend beaucoup2kR−mgcosθ0de temps.−π10sinc xπxProblèmes <strong>sur</strong> l’oscillateur <strong>harmonique</strong>, page 5
III. A. 1) dr = drur+ rdθu θ ; 3)1 ( )2Ep= k r − .kB. 1) mx = −k ( x − ) ω 0 = ; 2)mp122 2( ) 2E = k a + x − ;4) si a < , il y a trois positions d’équilibre, x = 0 instable, etx =±22− a stables ; si a > , il y a une position d’équilibre,x = 0 stable ; 5) voir ci-contre ; 6) ω = ω0 1 − ; 7)a2aω = ω 1 − ; 8) 20 2voir ci-contre ; 10) voirà droite le graphe de kχ en fonction de a / ; 11) me<strong>sur</strong>er defaibles variations de force.D.1) x = 0 ;2)3 4kx kxF − E2 p =2284 4( )2 4 4mxkx kx; 3)m dx k xm− xE = + = ; 4) =±; 5)22 2288dt 4m mT = 10, 5 ; 6.a) T = 22,5 s ; 6.b) T = 11,2 s ; 7) périodexmkinversement proportionnelle à l’amplitude.IV. 1) k( a − b) = 10 N ; 2) k ′ = 2k; 3)x = v 0 sin ω t =ω0, 03 sin100πt ( x en mètre, t en seconde) ; 4) t = = 0, 0314 s ; x = −v0; 5)ω1 2x = mg/ k′ = 0,001mm; 6) F = − k ′ X Ep=2k′X ; 7) mX 2π= −k ′ X ; 8) T = = 0, 0628 s ; 9)ω2 2mgmgX =± =± 0, 001 m ; 10) F op = fx où f < 0 ; 11) W op = − = −0, 0005J ; 12) amplitude desk ′2k′oscillations multipliée par 2 .θθV. 1) PΩ = 2a cos ; 2) T = K 2( 2acos − 2 ) ; 3) V = aθ ; 4) le poids, la tension du ressort et la réaction du1demi cercle ;( ( ) ) 2θ θEp= −mgacos θ +2K 2acos θ/2− ; 5) ma θ = ( 2( Ka −mg ) cos −K 2 ) sin ; 6) θ = 02K ou θ =±θ1, où θ 1 = 2 arccos ; 7) K 2 ( Ka − mg )( a −2) ≤ mg < K( a −2 ) ; 8) θ = 0 est stable simg ≤ K ( a − 2 ) et instable dans le cas contraire ; si θ 1 existe, θ = ± θ 1 sont des positions d’équilibre stable ; 9) θ = 0 ,ginstable, et θ =±π/3, stables ; 10) a ε = − ε qui est l’équation d’un oscillateur <strong>harmonique</strong> de pulsation Ω telle42que Ω = g K4a= 8m; 11) la perle a un mouvement approximativement uniforme ε≈ ε jusqu’à ce qu’elle0 t 2parvienne à l’extrémité du demi cercle ; 12) K ' = 125N/m ; 13) L = 4a = 7,8cm; 14) LO= ma θ k ; 15) OP ∧ F = aF θ k .Problèmes <strong>sur</strong> l’oscillateur <strong>harmonique</strong>, page 6
CorrigésI.1.a) La loi fondamentale de la dynamique projetée <strong>sur</strong> la direction du mouvement donne mx = −kx .1 21.b) Epest la fonction de x , si elle existe, telle que dEp= − Fdx = kxdx ⇒ Ep= kx .22 21.c) Comme il existe une énergie potentielle associée à la force totale, l’énergie mécanique E = 1 mx +1 kx est2 2d 1 2 1 2une constante du mouvement. Par conséquent, ( mx + kx ) = 0 ⇒ mxx + kxx = 0 ⇒ x( mx + kx ) = 0. Ordt 2 2x= 0 x = cstevérifie la conservation de l’énergie, mais, en général, pas la loi fondamentale de la dynamique, car,si la force est non nulle, le mobile ne reste pas immobile ; donc mx+ kx = 0 .1.d) La solution de l’équation différentielle est x = Acos ω t + Bsin ω t x= −Aωsin ω t + Bωcosωt.Les conditions initiales s’écrivent x = A v = Bω.0 0v0La solution du problème est donc : x = x0 cos ω t + sin ωt.ωm1.e) ( ) 2 mEc= −x0ωsin ω t + v0 cos ω t = ( x0 2 ω 2 sin 2 ω t + v0 2 cos 2 ω t + 2x0ωv0sin ωtcosωt ).2 22 1− cos2ω t 1 2 1+ cos2ωt1 sin2ωtOr sin ω t = = cos ω t = = sin ωtcos ω t = = 0 .2 2 2 2 22 20 + 0m 2 2 2 kx mvED’où Ec= ( x0ω + v0) = ⇒ Ec= .4 42EComme E = Ec+ Ep, E p = .22.a) f est sans dimension, mg a la dimension d’une force et k a la dimension du rapport d’une force à unelongueur ; donc α a la dimension d’une longueur.2.b) Le corps, soumis à son poids mg , à la réaction de la table N + T et à la tension du ressort F , est en équilibre si sa vitesse est nulle et si mg + N + T + F = 0 , soit N = mg et T = F = k x < fmg ⇒ x ≤ α.2.c) mg + N + T + F = ma , soit en projetant <strong>sur</strong> la verticale mg = N et en projetant <strong>sur</strong> la direction dumouvement mx = − kx + T . Comme x 0 > 0 , le mobile se met en mouvement dans le sens négatif ; le frottementfreinant le mouvement, T > 0 , donc T = f mg, d’où mx+ kx = fmg2.d) La solution générale de l’équation sans second membre est x = Acosω t + Bsinωt.Une solution particulière est x = α .La solution générale est donc x = α + Acos ω t + Bsin ω t x= −Aωsin ω t + Bωcosωt.Les conditions initiales donnent x = α + A = Bω.0 0La solution du problème est donc x = α + ( x −α) cos ω t x= −ω( x − α ) sin ωt.0 02.e) Le mobile s’arrête au premier instant où sa vitesse s’annule, soit àt = π/ω. La durée de cette phase dumouvement est π/ω.2.f) Alors x = x1 = 2α−x02.g) Il y a arrêt définitif si 2α− x0 < α⇔α< x0≤ 3α.3.a) Si on ne considère pas leur dernier terme, la suite x i est une suite alternée et la suite u i = ( −1)i xiest une suitede signe constant, celui de x 0 ; toutefois, le dernier terme de ces deux suites n’a qu’une chance <strong>sur</strong> deux d’obéir à cetterègle.3.b) Appliquons le théorème de l’énergie cinétique entre les arrêts de rang i et i + 1 ; la force totale est la sommed’une force conservative, la tension du ressort, à laquelle est associée une énergie potentielle , et d’une force nonconservative, le frottement, dont le travail, toujours négatif, satisfait à W = ∆( E c + E p ) :1 1−fmg x − x = kx − kx2 21− fmg u + u = k u − u2u − u = −α 2i+12 2i+ 1 i i+1 i2 2( ) ( )i+ 1 i i+1 iiiui= x0 −2αi ⇔ xi= ( −1) ( x0−2αi)Problèmes <strong>sur</strong> l’oscillateur <strong>harmonique</strong>, page 7E p
Cette relation est valable jusqu’au dernier terme de la suite.Remarque : si x 0 < 0 , ui= x0 + 2αi.3.c) Il y a arrêt définitif à l’arrêt de rang N six0 −α x0+ α−α < x0 −2α N < α⇔ < N < , donc N est la2α 2αx 0 + αpartie entière de2α .Remarquesx0+ αx0−α• Si est entier, il y a arrêt à N = , alors que la2α2αx 0 + αpartie entière est . Ce cas est académique, car x variant continûment, la probabilité de cette circonstance est2α 0nulle.x 0 + α• Si le signe de x 0 est inconnu, N est la partie entière de .2α3.d) Si x 0 = 4, 5α , N = 2 , u1 = 2, 5α x 1 = −2, 5α u2 = x2= 0, 5α. D’où le graphe ci-dessus.Mais si x 0 = 3, 5α , N = 2 , u1 = 1, 5α x1 = −1, 5α u2 = x2= −0, 5α. On voit que le signe du dernierterme de chacune des suites x , u n’est pas déterminé par la règle énoncée en 3.a.iiII.1) Un champ est une fonction de la position d’un point.2) L’énergie potentielle associée à une loi de force est la fonction de la position, si elle existe, dont la variation estégale à l’opposé du travail de la force.3) Si f est un champ scalaire, fonction des coordonnées cartésiennes xy , ,z d’un point, ∂f ∂f ∂fgradf = ux + uy + z∂x ∂y ∂zu . On peut aussi définir le gradient de f comme le champ vectoriel tel que ∀dr ,gradf ⋅ dr = df 1 24) dEp = −T ⋅ dr = kxur ⋅ dr = kxdr = kxd( + x)= kxdx ⇒ Ep=2kx . Réciproquement T = −gradEp .5) A l’équilibre, le corps est au milieu de AB.2k6) mx = − k( a + x − ) + k( a −x − ) = −2kx⇒ ω x =m2 2 y2k7) my = −2T sin θ = − 2 k( a + y − ) ≈ −2 ky(1 − / a) ⇒ ω (1 / )2 2y = − aa + ym8) La force totale est la somme des deux tensions des ressorts qui dérivent toutes deux d’une énergie potentielle.Donc la force totale dérive d’une énergie potentielle qui est la somme des énergies potentielles des deux forces.9) Les axes Ox et Oy sont des axes de symétrie de la figure, donc E est une fonction paire de x et une fonctionpaire de y .210) Sur l’axe des x , y = 0 , donc E = b + ex ; d’autre part,E = − Fdx = − − 2kxdx = kx + cste ⇒ e = k .p∫∫Sur l’axe des y , x = , donc E = b + gy ; d’autre part,20 p2pE = − Fdy = − −2 k(1 − / a) ydy = k(1 − / a) y + cste ⇒ g = k(1 − /a) .p11) T = −gradE∫ ∫ p∂EpTx= − = − 2ex = −2kx∂x∂EpTy= − = − 2gy = −2 k(1 − / a)y∂y12)mx= −2kxmy= −2(1 k − / a)y13)2pProblèmes <strong>sur</strong> l’oscillateur <strong>harmonique</strong>, page 8
III.x = x cos( ω t + ϕ )my = y cos( ω t + ϕ )mxyxy2k2 2 2k3a14) ω x = 2ωy ⇒ = ω x = 4ω y = 4 (1 − / a)⇒ =mm4A. 1) dr = drur+ rdθu θ .2) L’énergie potentielle est la fonction de la position, si elle existe, telle que dE ( ) ( )p = −F ⋅ dr = −F r dr ⇒ Ep= −∫ F r dr , qui existe et est bien une fonction de la seule position.3) C’est un cas particulier de ce qui précède. Ep= −∫ −k( r − ) dr = 1 ( ) 22 k r − .B.1) mx = −k ( x − ) ω 0 =k.m2) Comme il n’y a pas de frottement, la réaction de l’axe ne travaille pas ; comme l’axe Ox est horizontal, le travaildu poids es t nul. L’énergie potentielle associée à la force totale est donc celle associée à la tension du ressort, soitp122 2( ) 2E = k a + x − dEp2 2 2x⎛⎞3) ( a x )kx= − = − + − = − 1dx 2 2⎜ − 2 22 a + x ⎜⎝ a + x ⎠⎟4) Les positions d’équilibre satisfont à F = 0 , soit x = 0 ouF k en utilisant ( u ) = 2uu.2 2x =± − a .Une position d’équilibre est stable si F( x ) est une fonctiondFdécroissante de x . Examinons le signe de .dxdF( 0) = −k( 1 −dxa ) < 0 si a > .2dF 2 2 kx( a )0dx ± − = − 2< .D’où• Si a < , il y a trois positions d’équilibre, x = 0 instable, et22x =± − a stables ;• si a > , il y a une position d’équilibre, x = 0 stable.On peut aussi obtenir ce résultat en discutant la forme du graphe de Ex2′ ′. Un point où la tangente à ce graphe esthorizontale est une position d’équilibre. L’équilibre est stable s’il s’agit d’un minimum. Le graphe est tracé ci-dessuspour plusieurs valeurs de a / .a x2 2 2eq a xeqa5) Si < 1 =± 1− ⇒ + = 1. Donc le 2 graphe (ci-contre) de x / en fonction de a se compose d’un demi, ( ) ( )eq /cercle de rayon 1 et d’une demi droite.6) Si la position d’équilibre stable est x = 0 , à son voisinage,( 1 ) ( )2 k mx = F −kx− ⇒ ω = 1− ω = ω01−a m aa7) Si les positions d’équilibre stables sont x =± − a , en leurvoisinage,2dF⎛ a ⎞mx= F( x) ( x − xeq ) ( xeq ) = −k ⎜1− 2( x −xeq)dx⎜⎝ ⎠⎟2 k ⎛ a ⎞ aω = ⎜1− ω = ω 1−m ⎜⎝ ⎠⎟2 22 0 28) Voir ci-contre le graphe de ω/ ω 0 en fonction de a / .eq22p( )Problèmes <strong>sur</strong> l’oscillateur <strong>harmonique</strong>, page 9
9) Près d’une position d’équilibre, la force <strong>sur</strong> le mobile estapproximativement F( x) ( x − xeq) F′( xeq).Si l’on exerce en outre une force δ F , le mobile est soumis au totalà la force δ F + ( x − xeq) F′( xeq). Si l’équilibre est stable, sanouvelle position d’équilibre est telle queδ F + ( x − xeq) F′( xeq) = 0 . La susceptibilité est doncx − xeq1χ = = − .δ F F ′ ( x )eq2 1Or la pulsation des oscillations près de la position d’équilibre est ω = − F ( x eq )m ′ .1D’où χ = .2m ω10) Voir à droite le graphe de k χ en fonction de a / .11) Alors χ est très grand ; le dispositif, très sensible, peutme<strong>sur</strong>er de faibles variations de force.D.(2 2( )−1/21) F = −k x 1− 1 + x / . Il n’y a qu’une positiond’équilibre, x = , qui est stable, car 1− 1 + x / > 0,)2 2 −0 ( ) 1/2donc F est du signe contraire de x .2)2 −1/22⎛ x ⎞ 1 xkx⎜ + 1 F2 − ⇒ −⎟2⎜⎝ ⎠ 223 4kx dx kxdEp= − Fdx = E =282 4mxkx kxm43) E = + =22 2882 p 2( )4 4 232dx k xm− x4mdx4) =± t =±dt24m∫ k 4 4xm− xT 2x m dx5) = .4 ω ∫04 40 xm− x8 1 dumFaisons le changement de variable x = xmu dx = xmdu T = 10,50 40xm1 u= ω ∫− xmk .8×156) ω 0 = 7 rad/s a) T = × 1, 31 = 22,5 s b) T = 11,2 s .77) Contrairement au cas de l’oscillateur <strong>harmonique</strong>, la période est inversement proportionnelle à l’amplitude.IV.1) A l’équilibre, les tensions des ressorts sont égales, donc la position d’équilibre est équidistante des deux pointsd’attache des ressorts ; leur tension est k( a − b) = 500 × ( 0,1 − 0, 08)= 10 N .2) La force subie par le corps est la somme des tensions des ressorts, soitF = − k( a + x − b) + k( a −x − b) = −2kx , de la forme − kx ′ , où k′ = 2k .3) L’équation du mouvement est mx k ′−1 = − x . Posons ω = k′/ m = 1000/ 0,1 = 100 rad.s . La solutiongénérale est x = Acos ω t + Bsin ω t x= −Aωsin ω t + Bωcosωt.Les conditions initiales sont x0 = A = 0vx 0 = Bω = v0. D’où la solution x = 0 sin ω t = 0, 03 sin100t( x enωmètre, t en seconde).π4) Le corps revient à sa position d’équilibre au bout d’une demi période : t = = 0, 0314 s . Alors x = −v 0 .ω5) Orientons l’axe vertical vers le bas. La force <strong>sur</strong> le corps est F = m g − k′x ; l’équilibre a lieu pourF = 0 ⇒ x = mg/ k′ = 0,1 × 10/1000 = 0, 001mm .Problèmes <strong>sur</strong> l’oscillateur <strong>harmonique</strong>, page 10
mg1 26) x = + X ⇒ F = − k′ X Ep= − FdX =2k′k ′ ∫ X .7) mX = −k ′ X .2π8) T = = 0, 0628 s .ωmg9) Les positions extrêmes sont X =± =± 0, 001 m .k ′10) On peut considérer une force de freinage visqueux F = fx(ou bien proportionnelle au carré de la vitesse).11) ( 1 2 1 2) 1 mgWop2mX 2k′ X2k′( )op2 2 2 22m g 0,1 × 10= ∆ + = 0− = − = − = −0,0005J.k′ 2k′ 2 × 100012) L’amplitude des oscillations est multipliée par 2 .V.θ1) PΩ = 2acos s’obtient en raisonnant <strong>sur</strong> le triangle isocèle OPΩ dont les angles P et Ω valent θ/2.2θ2) T = K( a − )2 cos 23) V = a θ .4) P est soumis au poids, à la tension du ressort et à la réaction du demi cercle. Les deux premières forces sont1conservatives et ont pour énergie potentielles −mga cos θ et ( ( ) ) 22K 2acos θ/2− tandis que la troisième ne1travaille pas. D’où : E = −mgacos θ + K( 2acos ( θ/2)− ) 2 .p21 2 25) La conservation de l’énergie s’écrit : E = ma θ + E ( θ ) ; en dérivant par rapport au temps :2 pdE2 pma θθ + θ = 0dθ, soit en éliminant la solution parasite θ = 0 :1 dE pma θ θ θθ = Fθ= − = −mg sin θ + K ( 2a cos − ) sin = ( 2( Ka −mg ) cos −K) sina dθ2 2 2 θ .2θ θ θ6) Les positions d’équilibres sont celles pour lesquelles: Fθ= 2( Ka −mg)sin cos − K sin = 0 , soit :2 2 2– ou bien θ = 0 ;θ1K – ou bien θ =±θ 1 tel que cos =si cette équation a des racines.2 2 ( Ka − mg )π θ7) θ 1 , compris entre 0 et (soit1π 1compris entre 0 et ), existe si 12 24 2≤ K 2( Ka − mg )< , ce qui exige2( Ka − mg )Ka > mg et 1 < ≤ 2. Donc θ 1 existe si KK ( a −2) ≤ mg < K( a −2 )Le poids ne doit être, ni trop grand (alors il n’y a qu’une position d’équilibre, qui est stable, en θ = 0), ni trop petit (alorsl’action du ressort l’emporte, la position d’équilibre θ = 0 est instable et lorsqu’on s’en écarte, la perle est rappelée auπdelà de sa position extrême θ = ).2dF8) L’équilibre est stable si θ dF< 0 et instable si θ dFθK θ> 0 . Comme = −( Ka −mg)cos θ − cos , ladθdθdθ2 2position d’équilibre θ = 0 est stable si mg ≤ K ( a − 2 )(alors, c’est la seule position d’équilibre) et instable dans lecas contraire.Si θ 1 existe, θ = ± θ 1 sont des positions d’équilibre stable, parce que les positions d’équilibres sont alternativementstables et instables. On peut aussi le montrer en examinant le signe dedFθK θ1= ( Ka −mg) cos θ1− cosdθ2 2⎧2 2 2K K K K( Ka mg ) ⎪ ⎡ ⎤ ⎫2 1⎪ = − ⎨− ⎬ − = −(Ka −mg) qui est négatif puisque⎪⎩⎢⎣2( Ka −mg ) ⎥⎦⎪⎭2 2( Ka −mg ) 4( Ka −mg)1K 12( Ka − mg )< .Problèmes <strong>sur</strong> l’oscillateur <strong>harmonique</strong>, page 11
θπππ9) cos = ; θ 2 21 = . Les positions d’équilibre sont donc θ = − , θ = 0etθ =+ .33 3dFθ ⎛ 3 ⎞Comme ( θ = 0)= 1− mg >dθ ⎜⎝ 2 ⎠⎟0, la position d’équilibre θ = 0 est instable.1 3dFθ1Comme ( θ =±θ 1 ) = − mg < 0 , les positions d’équilibre θ = ± θ 1 sont stables.dθ4Si ε est petit, une expression approximative de la force au voisinage de la position d’équilibre est :dFθmgmgFθ ≈ε ( θ=±θ 1 ) = − ε. La loi fondamentale de la dynamique s’écrit maε = − ε qui est l’équation d’undθ442oscillateur <strong>harmonique</strong> de pulsation Ω telle que Ω g K= =4a8m.111) L’énergie cinétique initiale est ( )2 2 mgaEc0 = m a ε 0= = 0,25mga.2 4La différence d’énergie potentielle entre le point de départ (minimum) et la position extrême possible estππ 5Ep( θ = ) −Ep( θ = ) = mga( − 6)≈ 0,05mga , nettement plus petit que l’énergie cinétique initiale. Donc2 3 2la perle a un mouvement approximativement uniforme ε≈ε 0 t jusqu’à ce qu’elle parvienne à l’extrémité du demicercle. L’énoncé ne permet pas de savoir ce qu’il advient ensuite.2 K K 'K12) Ω = = . Donc K ' = = 125 N/m . K’ est nettement plus petit que K, car le poids s’oppose à8mm8l’action du ressort et le ressort résultant est donc plus faible.2 g g8mg13) Ω = = . Donc L = 4a = = 7,8cm. A noter l’irréalisme de la petitesse de a. En l’absence de4aLKressort, le système est équivalent à un pendule de longueur a, donc on aurait L = a. Le ressort jouant contre le poids, toutse passe comme si la pesanteur était plus faible, ou, ce qui revient au même, comme si la longueur du pendule était plusgrande. 14) LO= ma2 θ k . 15) OP ∧ F = aF θ k .dL16) O 2= OP ∧ F soit ma θ = aFdtθ qui au facteur a près est identique à l’équation de la question 5.VI.1) La fonction sinc( x ) est continue en x = 0 . Pour 0 ≤ x ≤ π, elle est décroissante ; en voici deuxdémonstrations :Démonstration 1.d sinc x x cos x − sin x dsincx=dx2 ; < 0 ⇔ x cosx < sinx. Cette proposition est vraie, car de deux choses l’une :xdxπ– si 0 < x < , la condition équivaut à x < tan x qui est toujours vrai ;2– siπ ≤ x < π , x cos x ≤ 0 et sin x > 0 .2Démonstration 2.d sinc x x cos x − sin x=.sinc xdx2x1Posons g ( x ) = x cos x − sin x .g′ ( x) = − x sin x < 0 pour 0 < x < π et g ( 0)= 0 montrent que g( x ) < 0xd sinc x g( x)0pour 0 < x < π , donc que = < 0 .dx2x−ππsinc x est une fonction paire, d’où son graphe ci-contre.2) La force résulte du poids, des tensions T [( )1 = k π−θ R −L]et T 2 = k[ ( π + θ)R −L]des ressorts et de laréaction du cercle. Sa projection <strong>sur</strong> la tangente au cercle est mg sin θ + T1 − T2= f ( θ ) = mg sin θ−2kRθ.3.a) θ = 0 est une position d’équilibre, car alors f = 0 .Si θ est petit, sin θ≈θ , donc f ≈ ( mg −2 kR)θ .3.b) Si 2 kR > mg , la force est du signe contraire de θ , donc tend à rappeler M vers B : B est une positiond’équilibre stable.3.c) Si 2kR < mg , la force est du signe de θ , donc tend à écarter M de B : B est une position d’équilibre instable.Problèmes <strong>sur</strong> l’oscillateur <strong>harmonique</strong>, page 12
3.d) Enfin si 2 kR = mg , θ > sin θ montre que la force est du signe contraire de θ , donc tend à rappeler M versB : B est une position d’équilibre stable.4) Si 2kR > mg , au voisinage de θ = 0 , f ≈ ( mg −2 kR)θ = mR θ qui est de la forme de l’équation 22kR − mgθ + ωθ= 0 d’un oscillateur <strong>harmonique</strong> de pulsation ω telle que ω = .mR2kR5) f = mgsin θ−2kRθ= 0 ⇔ { θ = 0 ou sinc θ =mg }. Or, d’après le graphe de la fonction sinus cardinal,2kR2kRl’équation sinc θ = pour 0 < θ < π a une racine positive en θ si < 1 et n’a pas de racine dans le casmgmgcontraire.Donc, si et seulement si 2kR < mg , il existe, outre la position θ = 0 , deux autres positions d’équilibre, θ = θ0et2kRθ = −θ0, où θ0est la solution positive unique de sinc θ 0 =mg6) Si ces deux positions supplémentaires d’équilibre existent, alors elles sont stables. En effet, elles le sont si f estdf2kRsinθ0une fonction décroissante de θ , soit ( θ 0) < 0 ⇔ mg cosθ0 − 2kR< 0 ⇔ cosθ 0 < = .dθmgθ0Si 0 < θ 0 < π/2, cela équivaut à θ 0 < tan θ0qui est toujours vrai.Si π < θ 0 < π , cos θ , donc l’inégalité est toujours vérifiée.0 < 02dfdf7) Soit ( θ 0) = mg cosθ0−2kR. Près de θ 0 , l’équation du mouvement est mRθ = f ( θ)≈ ( θ − θ0) ( θdθdθ0) quiest l’équation d’un oscillateur <strong>harmonique</strong> de pulsation ω telle que2 1 df cos 0 2( 0) mg θ − kR 2 mR 2ω = − θ = − ⇒ T = π où sincθ kR0 =mR dθmR 2kR −mg cosθmgθ= f mg( sin ) mg( ...)03 3mgθ8.a) Dans le cas limite mg 2kR, = −θ + θ = −θ + θ− + − .6 64mgRθ8.b) Ep ∫ −fRdθ = en omettant la constante d’intégration.244 44 41 2 2 mgRθ mgRθmdθg ( θm− θ )8.c) La conservation de l’énergie donne mR θ + = ⇒ = θ =±.2 24 24 dt12RdθdθT 12Rθmdθ8.d) t = ∫ dt = ∫ = ± ⇒ =θ ∫g ( 4 4 ) 4 g ∫θ 0m − θ θm4 4− θ12R1qui se calcule en faisant le changement de variable θ = θ 8 3Rdxmx d θ = θ mdx ⇒ T = 0 4m g ∫ θ 1 − x.9.a) Près d’une position d’équilibre stable θ , la force totale est F + f()θ . A l’équilibre, elle est nulle :0F + f( θ 0 + ∆θ ) = 0. Si θ0est une position d’équilibre stable en l’absence de F ,df∆θ 1F = −f( θ 0 + ∆θ) ≈ −∆θ ( θ0). D’où χ = = − .dθF df( θ0)dθ19.b) Si 2 kR > mg , χ = .2kR − mg19.c) Si 2kR < mg , χ =.2kR−mgcosθ09.d) Si 2 kR est voisin de mg , χ est très grand : le système est très sensible, il peut détecter et me<strong>sur</strong>er lesvariations de la pesanteur, qui sont très petites.La période d’oscillation est très grande, car, d’après 8.d), lim( θ m → 0)T = ∞ : une me<strong>sur</strong>e prend beaucoup de temps.Problèmes <strong>sur</strong> l’oscillateur <strong>harmonique</strong>, page 13













