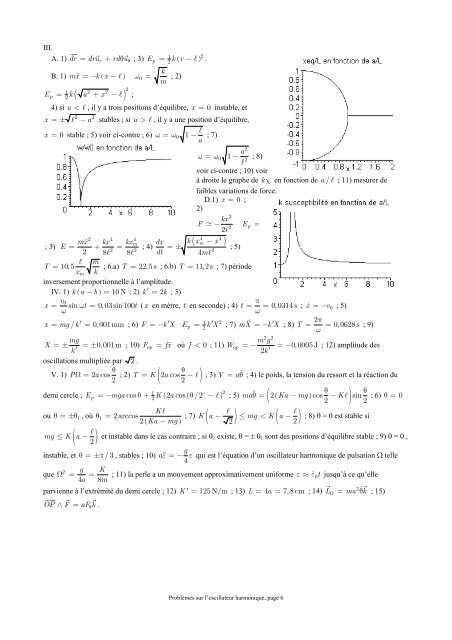
III. A. 1) dr = drur+ rdθu θ ; 3)1 ( )2Ep= k r − .kB. 1) mx = −k ( x − ) ω 0 = ; 2)mp122 2( ) 2E = k a + x − ;4) si a < , il y a trois positions d’équilibre, x = 0 instable, etx =±22− a stables ; si a > , il y a une position d’équilibre,x = 0 stable ; 5) voir ci-contre ; 6) ω = ω0 1 − ; 7)a2aω = ω 1 − ; 8) 20 2voir ci-contre ; 10) voirà droite le graphe de kχ en fonction de a / ; 11) me<strong>sur</strong>er defaibles variations de force.D.1) x = 0 ;2)3 4kx kxF − E2 p =2284 4( )2 4 4mxkx kx; 3)m dx k xm− xE = + = ; 4) =±; 5)22 2288dt 4m mT = 10, 5 ; 6.a) T = 22,5 s ; 6.b) T = 11,2 s ; 7) périodexmkinversement proportionnelle à l’amplitude.IV. 1) k( a − b) = 10 N ; 2) k ′ = 2k; 3)x = v 0 sin ω t =ω0, 03 sin100πt ( x en mètre, t en seconde) ; 4) t = = 0, 0314 s ; x = −v0; 5)ω1 2x = mg/ k′ = 0,001mm; 6) F = − k ′ X Ep=2k′X ; 7) mX 2π= −k ′ X ; 8) T = = 0, 0628 s ; 9)ω2 2mgmgX =± =± 0, 001 m ; 10) F op = fx où f < 0 ; 11) W op = − = −0, 0005J ; 12) amplitude desk ′2k′oscillations multipliée par 2 .θθV. 1) PΩ = 2a cos ; 2) T = K 2( 2acos − 2 ) ; 3) V = aθ ; 4) le poids, la tension du ressort et la réaction du1demi cercle ;( ( ) ) 2θ θEp= −mgacos θ +2K 2acos θ/2− ; 5) ma θ = ( 2( Ka −mg ) cos −K 2 ) sin ; 6) θ = 02K ou θ =±θ1, où θ 1 = 2 arccos ; 7) K 2 ( Ka − mg )( a −2) ≤ mg < K( a −2 ) ; 8) θ = 0 est stable simg ≤ K ( a − 2 ) et instable dans le cas contraire ; si θ 1 existe, θ = ± θ 1 sont des positions d’équilibre stable ; 9) θ = 0 ,ginstable, et θ =±π/3, stables ; 10) a ε = − ε qui est l’équation d’un oscillateur <strong>harmonique</strong> de pulsation Ω telle42que Ω = g K4a= 8m; 11) la perle a un mouvement approximativement uniforme ε≈ ε jusqu’à ce qu’elle0 t 2parvienne à l’extrémité du demi cercle ; 12) K ' = 125N/m ; 13) L = 4a = 7,8cm; 14) LO= ma θ k ; 15) OP ∧ F = aF θ k .Problèmes <strong>sur</strong> l’oscillateur <strong>harmonique</strong>, page 6
CorrigésI.1.a) La loi fondamentale de la dynamique projetée <strong>sur</strong> la direction du mouvement donne mx = −kx .1 21.b) Epest la fonction de x , si elle existe, telle que dEp= − Fdx = kxdx ⇒ Ep= kx .22 21.c) Comme il existe une énergie potentielle associée à la force totale, l’énergie mécanique E = 1 mx +1 kx est2 2d 1 2 1 2une constante du mouvement. Par conséquent, ( mx + kx ) = 0 ⇒ mxx + kxx = 0 ⇒ x( mx + kx ) = 0. Ordt 2 2x= 0 x = cstevérifie la conservation de l’énergie, mais, en général, pas la loi fondamentale de la dynamique, car,si la force est non nulle, le mobile ne reste pas immobile ; donc mx+ kx = 0 .1.d) La solution de l’équation différentielle est x = Acos ω t + Bsin ω t x= −Aωsin ω t + Bωcosωt.Les conditions initiales s’écrivent x = A v = Bω.0 0v0La solution du problème est donc : x = x0 cos ω t + sin ωt.ωm1.e) ( ) 2 mEc= −x0ωsin ω t + v0 cos ω t = ( x0 2 ω 2 sin 2 ω t + v0 2 cos 2 ω t + 2x0ωv0sin ωtcosωt ).2 22 1− cos2ω t 1 2 1+ cos2ωt1 sin2ωtOr sin ω t = = cos ω t = = sin ωtcos ω t = = 0 .2 2 2 2 22 20 + 0m 2 2 2 kx mvED’où Ec= ( x0ω + v0) = ⇒ Ec= .4 42EComme E = Ec+ Ep, E p = .22.a) f est sans dimension, mg a la dimension d’une force et k a la dimension du rapport d’une force à unelongueur ; donc α a la dimension d’une longueur.2.b) Le corps, soumis à son poids mg , à la réaction de la table N + T et à la tension du ressort F , est en équilibre si sa vitesse est nulle et si mg + N + T + F = 0 , soit N = mg et T = F = k x < fmg ⇒ x ≤ α.2.c) mg + N + T + F = ma , soit en projetant <strong>sur</strong> la verticale mg = N et en projetant <strong>sur</strong> la direction dumouvement mx = − kx + T . Comme x 0 > 0 , le mobile se met en mouvement dans le sens négatif ; le frottementfreinant le mouvement, T > 0 , donc T = f mg, d’où mx+ kx = fmg2.d) La solution générale de l’équation sans second membre est x = Acosω t + Bsinωt.Une solution particulière est x = α .La solution générale est donc x = α + Acos ω t + Bsin ω t x= −Aωsin ω t + Bωcosωt.Les conditions initiales donnent x = α + A = Bω.0 0La solution du problème est donc x = α + ( x −α) cos ω t x= −ω( x − α ) sin ωt.0 02.e) Le mobile s’arrête au premier instant où sa vitesse s’annule, soit àt = π/ω. La durée de cette phase dumouvement est π/ω.2.f) Alors x = x1 = 2α−x02.g) Il y a arrêt définitif si 2α− x0 < α⇔α< x0≤ 3α.3.a) Si on ne considère pas leur dernier terme, la suite x i est une suite alternée et la suite u i = ( −1)i xiest une suitede signe constant, celui de x 0 ; toutefois, le dernier terme de ces deux suites n’a qu’une chance <strong>sur</strong> deux d’obéir à cetterègle.3.b) Appliquons le théorème de l’énergie cinétique entre les arrêts de rang i et i + 1 ; la force totale est la sommed’une force conservative, la tension du ressort, à laquelle est associée une énergie potentielle , et d’une force nonconservative, le frottement, dont le travail, toujours négatif, satisfait à W = ∆( E c + E p ) :1 1−fmg x − x = kx − kx2 21− fmg u + u = k u − u2u − u = −α 2i+12 2i+ 1 i i+1 i2 2( ) ( )i+ 1 i i+1 iiiui= x0 −2αi ⇔ xi= ( −1) ( x0−2αi)Problèmes <strong>sur</strong> l’oscillateur <strong>harmonique</strong>, page 7E p