Attention! Your ePaper is waiting for publication!
By publishing your document, the content will be optimally indexed by Google via AI and sorted into the right category for over 500 million ePaper readers on YUMPU.
This will ensure high visibility and many readers!
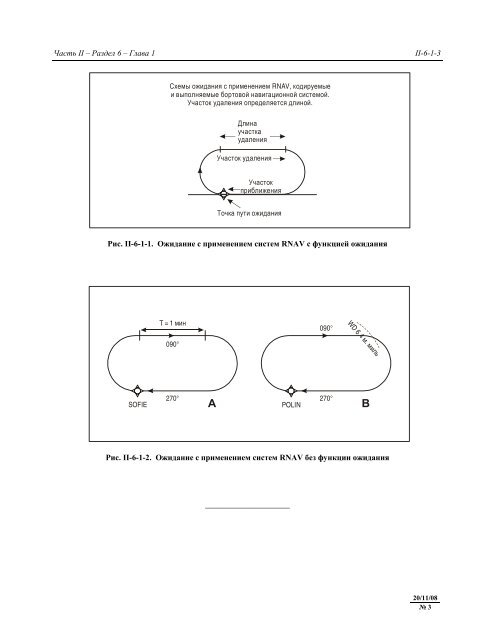
II-6-1-2 Правила – Производство полетов воздушных судов – Том I 1.3 ВОЗДУШНЫЕ СУДА, ОБОРУДОВАННЫЕ СИСТЕМАМИ RNAV БЕЗ ФУНКЦИИ ОЖИДАНИЯ (см. рис. II-6-1-2) 1.3.1 Воздушные суда, оборудованные системами RNAV без функции ожидания, могут выполнять опубликованную схему ожидания с применением RNAV вручную над точкой пути. 1.3.2 Из базы данных выбирается или вводится экипажем точка пути ожидания. Государство публикует желательный путевой угол приближения и окончание участка удаления. Пилоту следует выполнить перекрестную проверку местоположения точки пути с использованием информации о контрольной точке VOR/DME в случае ее наличия. 1.3.3 Пилот выполняет полет в зоне ожидания вручную, осуществляя как минимум следующие операции: а) переходит с автоматического на ручное задание точки пути; b) определяет активную точку пути ожидания (прямо до); с) выбирает желательный курс приближения (используя дополнительную цифровую клавиатуру, указатель курса HSI или задатчик пеленга на всенаправленный маяк (OBS) CDI) до установленной точки пути ожидания. 1.3.4 Схема ожидания этого типа будет выполняться вручную, и наведение по линии пути с применением RNAV обеспечивается только на линии пути приближения. Примечание. Точка пути ожидания может не обозначаться на карте как точка пути "флайовер", однако предполагается, что пилот и/или бортовая навигационная система при выполнении схемы ожидания будут рассматривать данную точку пути как точку пути "флайовер". 1.3.5 Конец участка удаления в схеме ожидания определяется по времени или по расстоянию от точки пути ожидания (WD), обеспечиваемой системой RNAV. 1.3.5.1 Участок удаления, определяемый по времени (см. рис. II-6-1-2 А). Отсчет времени полета по участку удаления начинается по завершении разворота на участок удаления или при выходе на траверз точки пути в зависимости от того, что наступает позже. 1.3.5.2 Участок удаления, определяемый по обеспечиваемому RNAV расстоянию от точки пути (см. рис. II-6-1-2 В). Если конец участка удаления определяется по задаваемому RNAV расстоянию от точки пути ожидания (WD), то участок удаления заканчивается, как только достигается это расстояние. 1.4 При наличии системы RNAV могут использоваться обычные типовые схемы полетов в зоне ожидания. В этом случае система RNAV не выполняет никаких функций, кроме функции управления автопилотом или командным пилотажным прибором. Пилот по-прежнему несет ответственность за обеспечение выдерживания воздушным судном принятых в п. 1.3 главы 1 раздела 6 части I скорости, угла крена, отсчета времени и расстояния. 1.5 ОТВЕТСТВЕННОСТЬ ПИЛОТА 1.5.1 При использовании оборудования RNAV для схем ожидания, не основанных на RNAV, пилот проверяет точность местоположения в контрольной точке ожидания при каждом пролете контрольной точки. 1.5.2 При полете по схемам ожидания с применением RNAV пилоты обеспечивают соответствие скоростям, указанным в таблицах I-6-1-1 и I-6-1-2. 18/11/10 № 4
Часть II – Раздел 6 – Глава 1 II-6-1-3 Схемы ожидания с применением RNAV, кодируемые и выполняемые бортовой навигационной системой. Участок удаления определяется длиной. Длина участка удаления Участок удаления Участок приближения Точка пути ожидания Рис. II-6-1-1. Ожидание с применением систем RNAV с функцией ожидания T = 1 мин 090° WD 6 , 4 м. миль 090° SOFIE 270° 270° POLIN A B Рис. II-6-1-2. Ожидание с применением систем RNAV без функции ожидания ___________________ 20/11/08 № 3