VM113 Buigen - vormgeven van dunne plaat.pdf - Induteq
VM113 Buigen - vormgeven van dunne plaat.pdf - Induteq
VM113 Buigen - vormgeven van dunne plaat.pdf - Induteq

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
De bedoeling <strong>van</strong> een kantpers is dat het drukvlak <strong>van</strong> de<br />
persbalk parallel blijft aan het drukvlak <strong>van</strong> de onderbalk.<br />
Doorbuigen <strong>van</strong> een hydraulisch aangedreven pers<br />
Doordat op een hydraulisch aangedreven kantpers de<br />
aandrijfkrachten, c.q. reactiekrachten meestal aangrijpen<br />
op twee punten <strong>van</strong> de bovenbalk, c.q. de onderbalk,<br />
vertonen deze balken bij belasting een doorbuiging (figuur<br />
M.2.6)<br />
Deze doorbuiging <strong>van</strong> de persbalk en de onderbalk geeft,<br />
wanneer geen tegenmaatregelen als bomberen of voorspannen<br />
worden genomen, een parallelliteitsafwijking.<br />
Dit resulteert in een hoekafwijking in het midden ten opzichte<br />
<strong>van</strong> de zijkanten <strong>van</strong> de kantpers. Voorts is een<br />
gelijkloopbesturing nodig, die voorkomt, dat de persbalk<br />
niet evenwijdig blijft aan de onderbalk.<br />
Bij het bomberen of het voorspannen wordt de doorbuiging<br />
<strong>van</strong> de persbalk of de onderbalk gecorrigeerd door<br />
bol maken <strong>van</strong> het drukvlak. Dit wordt ingesteld aan de<br />
hand <strong>van</strong> de te verwachten perskracht. Bij conventionele<br />
kantpersen wordt dit handmatig gedaan. Bij numeriek<br />
bestuurde kantpersen wordt dit meestal door middel <strong>van</strong><br />
een "programma" mechanisch of hydraulisch ingesteld<br />
(zie § 4.1).<br />
figuur M.2.6 Parallelliteitsafwijking, doorbuiging, tengevolge<br />
<strong>van</strong> de buigkrachten<br />
Doorbuigen <strong>van</strong> een servo-mechanisch aangedreven pers<br />
Doordat op een servo-mechanisch aangedreven kantpers<br />
de aandrijfkrachten aangrijpen op meerdere punten over<br />
de volle lengte <strong>van</strong> de persbalk, zal deze pers bij belasting<br />
aanmerkelijk minder doorbuigen (zie figuur M.2.7).<br />
Wanneer dit principe voor zowel de onder- als de bovenbalk<br />
wordt toegepast, kunnen compensatiemaatregelen<br />
tegen het doorbuigen geheel achterwege blijven.<br />
figuur M.2.7 Reduceren <strong>van</strong> de doorbuiging door gelijkmatige<br />
verdeling <strong>van</strong> de aandrijf- c.q. reactiekrachten<br />
43<br />
Uitvering <strong>van</strong> het C-frame<br />
De stijfheid <strong>van</strong> het C-frame bepaalt in hoge mate de weerstand<br />
tegen uitvering. Door de uitvering kan een hoekafwijking<br />
ontstaan (zie figuur M.2.8).<br />
figuur M.2.8 Uitvering C-frame<br />
De hoekafwijking wordt bij kantpersen veelal met een elektronische<br />
diepte-aanslag gecompenseerd, door een zogenaamd<br />
belastingonafhankelijk meetframe.<br />
Bij een O-frame zal het uitveren in mindere mate optreden,<br />
omdat het frame in deze richting symmetrisch is opgebouwd<br />
en daardoor alleen op trek wordt belast.<br />
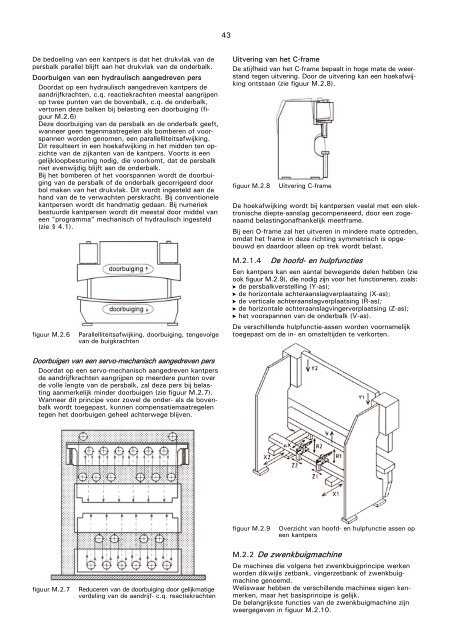
M.2.1.4 De hoofd- en hulpfuncties<br />
Een kantpers kan een aantal bewegende delen hebben (zie<br />
ook figuur M.2.9), die nodig zijn voor het functioneren, zoals:<br />
de persbalkverstelling (Y-as);<br />
de horizontale achteraanslagver<strong>plaat</strong>sing (X-as);<br />
de verticale achteraanslagver<strong>plaat</strong>sing (R-as);<br />
de horizontale achteraanslagvingerver<strong>plaat</strong>sing (Z-as);<br />
het voorspannen <strong>van</strong> de onderbalk (V-as).<br />
De verschillende hulpfunctie-assen worden voornamelijk<br />
toegepast om de in- en omsteltijden te verkorten.<br />
figuur M.2.9 Overzicht <strong>van</strong> hoofd- en hulpfunctie assen op<br />
een kantpers<br />
M.2.2 De zwenkbuigmachine<br />
De machines die volgens het zwenkbuigprincipe werken<br />
worden dikwijls zetbank, vingerzetbank of zwenkbuigmachine<br />
genoemd.<br />
Weliswaar hebben de verschillende machines eigen kenmerken,<br />
maar het basisprincipe is gelijk.<br />
De belangrijkste functies <strong>van</strong> de zwenkbuigmachine zijn<br />
weergegeven in figuur M.2.10.