
Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
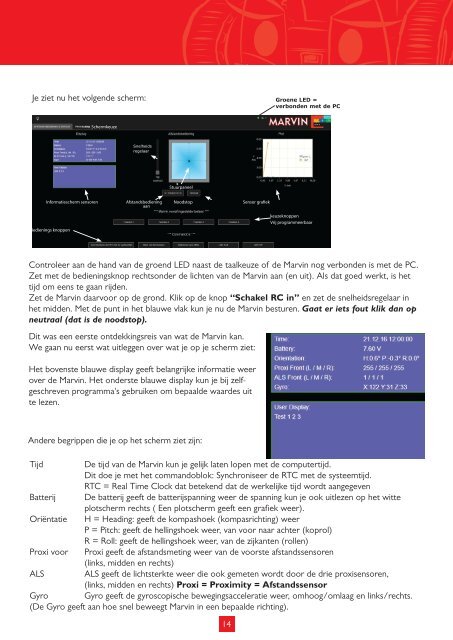
Je ziet nu het volgende scherm:<br />
Groene LED =<br />
verbonden met de PC<br />
----> Schermkeuze<br />
Snelheids<br />
regelaar<br />
Stuurpaneel<br />
Informatiescherm sensoren Afstandsbediening Noodstop Sensor grafiek<br />
aan<br />
Bedienings knoppen<br />
keuzeknoppen<br />
Vrij programmeerbaar<br />
Controleer aan de hand van de groend LED naast de taalkeuze of de Marvin nog verbonden is met de PC.<br />
Zet met de bedieningsknop rechtsonder de lichten van de Marvin aan (en uit). Als dat goed werkt, is het<br />
tijd om eens te gaan rijden.<br />
Zet de Marvin daarvoor op de grond. Klik op de knop “Schakel RC in” en zet de snelheidsregelaar in<br />
het midden. Met de punt in het blauwe vlak kun je nu de Marvin besturen. Gaat er iets fout klik dan op<br />
neutraal (dat is de noodstop).<br />
Dit was een eerste ontdekkingsreis van wat de Marvin kan.<br />
We gaan nu eerst wat uitleggen over wat je op je scherm ziet:<br />
Het bovenste blauwe display geeft belangrijke informatie weer<br />
over de Marvin. Het onderste blauwe display kun je bij zelfgeschreven<br />
programma's gebruiken om bepaalde waardes uit<br />
te lezen.<br />
Andere begrippen die je op het scherm ziet zijn:<br />
Tijd De tijd van de Marvin kun je gelijk laten lopen met de computertijd.<br />
Dit doe je met het commandoblok: Synchroniseer de RTC met de systeemtijd.<br />
RTC = Real Time Clock dat betekend dat de werkelijke tijd wordt aangegeven<br />
Batterij De batterij geeft de batterijspanning weer de spanning kun je ook uitlezen op het witte<br />
plotscherm rechts ( Een plotscherm geeft een grafiek weer).<br />
Oriëntatie H = Heading: geeft de kompashoek (kompasrichting) weer<br />
P = Pitch: geeft de hellingshoek weer, van voor naar achter (koprol)<br />
R = Roll: geeft de hellingshoek weer, van de zijkanten (rollen)<br />
Proxi voor Proxi geeft de afstandsmeting weer van de voorste afstandssensoren<br />
(links, midden en rechts)<br />
ALS ALS geeft de lichtsterkte weer die ook gemeten wordt door de drie proxisensoren,<br />
(links, midden en rechts) Proxi = Proximity = Afstandssensor<br />
Gyro Gyro geeft de gyroscopische bewegingsacceleratie weer, omhoog/omlaag en links/rechts.<br />
(De Gyro geeft aan hoe snel beweegt Marvin in een bepaalde richting).<br />
14