
Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
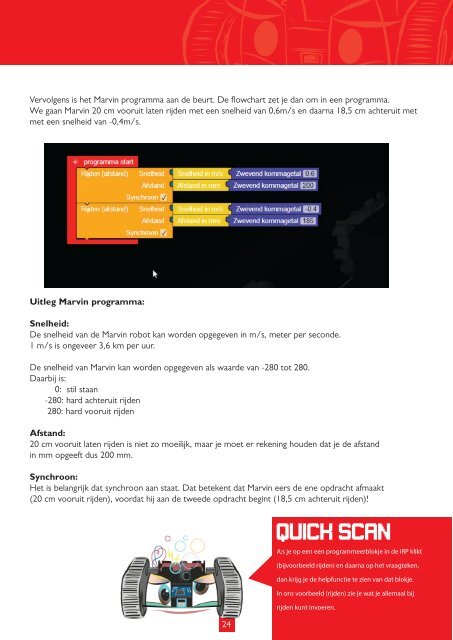
Vervolgens is het Marvin programma aan de beurt. De flowchart zet je dan om in een programma.<br />
We gaan Marvin 20 cm vooruit laten rijden met een snelheid van 0,6m/s en daarna 18,5 cm achteruit met<br />
met een snelheid van -0,4m/s.<br />
Uitleg Marvin programma:<br />
Snelheid:<br />
De snelheid van de Marvin robot kan worden opgegeven in m/s, meter per seconde.<br />
1 m/s is ongeveer 3,6 km per uur.<br />
De snelheid van Marvin kan worden opgegeven als waarde van -280 tot 280.<br />
Daarbij is:<br />
0: stil staan<br />
-280: hard achteruit rijden<br />
280: hard vooruit rijden<br />
Afstand:<br />
20 cm vooruit laten rijden is niet zo moeilijk, maar je moet er rekening houden dat je de afstand<br />
in mm opgeeft dus 200 mm.<br />
Synchroon:<br />
Het is belangrijk dat synchroon aan staat. Dat betekent dat Marvin eers de ene opdracht afmaakt<br />
(20 cm vooruit rijden), voordat hij aan de tweede opdracht begint (18,5 cm achteruit rijden)!<br />
24<br />
Quick scan<br />
A;s je op een een programmeerblokje in de iRP klikt<br />
(bijvoorbeeld rijden) en daarna op het vraagteken,<br />
dan krijg je de helpfunctie te zien van dat blokje.<br />
In ons voorbeeld (rijden) zie je wat je allemaal bij<br />
rijden kunt invoeren.