Clarissa Codá dos Santos Cavalcanti Marques Animaç ... - PUC-Rio
Clarissa Codá dos Santos Cavalcanti Marques Animaç ... - PUC-Rio
Clarissa Codá dos Santos Cavalcanti Marques Animaç ... - PUC-Rio

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
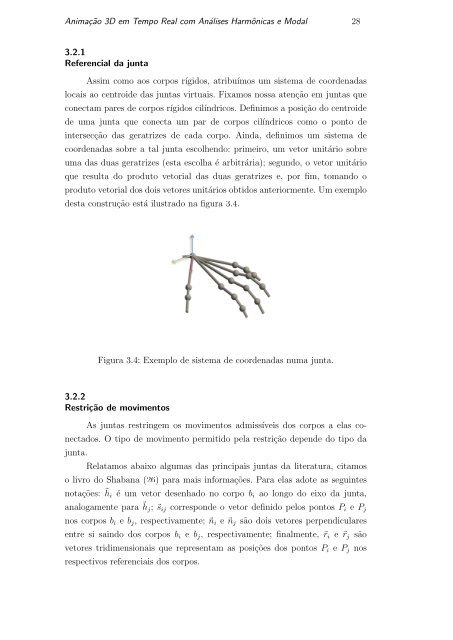
Animação 3D em Tempo Real com Análises Harmônicas e Modal 283.2.1Referencial da juntaAssim como aos corpos rígi<strong>dos</strong>, atribuímos um sistema de coordenadaslocais ao centroide das juntas virtuais. Fixamos nossa atenção em juntas queconectam pares de corpos rígi<strong>dos</strong> cilíndricos. Definimos a posição do centroidede uma junta que conecta um par de corpos cilíndricos como o ponto deintersecção das geratrizes de cada corpo. Ainda, definimos um sistema decoordenadas sobre a tal junta escolhendo: primeiro, um vetor unitário sobreuma das duas geratrizes (esta escolha é arbitrária); segundo, o vetor unitárioque resulta do produto vetorial das duas geratrizes e, por fim, tomando oproduto vetorial <strong>dos</strong> dois vetores unitários obti<strong>dos</strong> anteriormente. Um exemplodesta construção está ilustrado na figura 3.4.Figura 3.4: Exemplo de sistema de coordenadas numa junta.3.2.2Restrição de movimentosAs juntas restringem os movimentos admissíveis <strong>dos</strong> corpos a elas conecta<strong>dos</strong>.O tipo de movimento permitido pela restrição depende do tipo dajunta.Relatamos abaixo algumas das principais juntas da literatura, citamoso livro do Shabana (26) para mais informações. Para elas adote as seguintesnotações: ⃗ h i é um vetor desenhado no corpo b i ao longo do eixo da junta,analogamente para ⃗ h j ; ⃗s ij corresponde o vetor definido pelos pontos P i e P jnos corpos b i e b j , respectivamente; ⃗n i e ⃗n j são dois vetores perpendicularesentre si saindo <strong>dos</strong> corpos b i e b j , respectivamente; finalmente, ⃗r i e ⃗r j sãovetores tridimensionais que representam as posições <strong>dos</strong> pontos P i e P jrespectivos referenciais <strong>dos</strong> corpos.nos