

Эффективное животноводство № 9 (139) декабрь 2017
В этом номере читайте: 1. Новые эффективные термовозгонные средства дезинфекции для ветеринарии; 2. Зерновое сорго сорта Рось в рационах животных и птиц; 3. Эффективное использование фермента в рационах для молодняка перепелов; 4. К вопросу о наследственной предрасположенности к лейкозу крупного рогатого скота. И многое другое!
В этом номере читайте:
1. Новые эффективные термовозгонные средства дезинфекции для ветеринарии;
2. Зерновое сорго сорта Рось в рационах животных и птиц;
3. Эффективное использование фермента в рационах для молодняка перепелов;
4. К вопросу о наследственной предрасположенности к лейкозу крупного рогатого скота.
И многое другое!

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
эффективное<br />
<strong>животноводство</strong><br />
<strong>№</strong>9 <strong>декабрь</strong><br />
<strong>2017</strong><br />
33<br />
Зависимость ИТП1(D) построена<br />
в предположении, что оптимальное<br />
решение находится на нижней<br />
границе D1 интервала оптимального<br />
решения (1-я гипотеза). Зависимость<br />
ИТП2(D) построена в<br />
предположении, что оптимальное<br />
решение находится на верхней границе<br />
D2 интервала оптимального<br />
решения (2-я гипотеза).<br />
Величина информационного<br />
риска ИР принимаемого решения<br />
определяется зависимостями<br />
ИТП1(D) и ИТП2(D) и находится<br />
выше точки пересечения этих<br />
кривых.<br />
ИР = MAX(ИТП1(D), ИТП2(D))<br />
при D ∈ [D1, D2]<br />
На приведенном графике видно,<br />
что риск принимаемого решения<br />
не может быть ниже потерь, соответствующих<br />
точке пересечения<br />
кривых ИТП1(D) и ИТП2(D). Эта<br />
точка соответствует решению с<br />
минимальным информационным<br />
риском Dмр, а соответствующее ей<br />
значение потерь равно минимальному<br />
риску ИРmin. Очевидно, что<br />
решение Dмр может быть найдено<br />
из равенства:<br />
ИТП1(D) = ИТП2(D)<br />
Задача минимизации информационного<br />
риска при оптимизации<br />
рационов сводится к решнию следующих<br />
подзадач:<br />
1. Нахождение граничных решений<br />
D1 и D2 интервала оптимального<br />
решения.<br />
2. Определение зависимости<br />
информационно-технологических<br />
потерь ИТП от принимаемого решения<br />
D при предположении, что<br />
оптимальное решение находится<br />
на нижней границе интервала<br />
оптимального решения (ИТП1(D)).<br />
3. Определение зависимости<br />
информационнотехнологических<br />
потерь<br />
ИТП от принимаемого<br />
решения D при предположении,<br />
что оптимальное<br />
решение находится на<br />
верхней границе интервала<br />
оптимального решения<br />
(ИТП2(D)).<br />
4. Определение решения<br />
с минимальным информационным<br />
риском Dмр.<br />
Рацион как управленческое решение<br />
является вектором:<br />
x = (x1, x2, …, xj, …, xM),<br />
где xj – масса j-го корма в рационе<br />
(j ∈ [1, M]);<br />
M – количество кормов в рационе;<br />
и функционально зависит от<br />
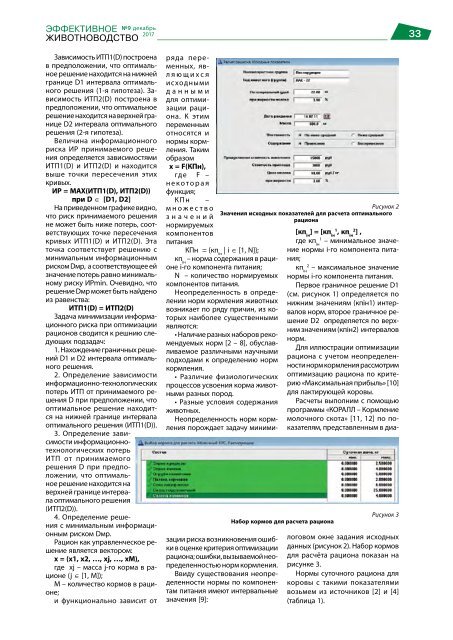
Рисунок 2<br />
Значения исходных показателей для расчета оптимального<br />
рациона<br />
ряда переменных,<br />
являющихся<br />
исходными<br />
данными<br />
для оптимизации<br />
рациона.<br />
К этим<br />
переменным<br />
относятся и<br />
нормы кормления.<br />
Таким<br />
образом<br />
x = F(КПн),<br />
где F –<br />
некоторая<br />
функция;<br />
КПн –<br />
множество<br />
значений<br />
нормируемых<br />
компонентов<br />
питания<br />
КПн = {кп iн<br />
| i ∈ [1, N]};<br />
кп iн<br />
– норма содержания в рационе<br />
i-го компонента питания;<br />
N – количество нормируемых<br />
компонентов питания.<br />
Неопределенность в определении<br />
норм кормления животных<br />
возникает по ряду причин, из которых<br />
наиболее существенными<br />
являются:<br />
• Наличие разных наборов рекомендуемых<br />
норм [2 – 8], обуславливаемое<br />
различными научными<br />
подходами к определению норм<br />
кормления.<br />
• Различие физиологических<br />
процессов усвоения корма животными<br />
разных пород.<br />
• Разные условия содержания<br />
животных.<br />
Неопределенность норм кормления<br />
порождает задачу минимизации<br />
риска возникновения ошибки<br />
в оценке критерия оптимизации<br />
рациона; ошибки, вызываемой неопределенностью<br />
норм кормления.<br />
Ввиду существования неопределенности<br />
нормы по компонентам<br />
питания имеют интервальные<br />
значения [9]:<br />
Набор кормов для расчета рациона<br />
Рисунок 3<br />
[кп iн<br />
] = [кп iн1<br />
, кп iн2<br />
] ,<br />
где кп iн<br />
1<br />
– минимальное значение<br />
нормы i-го компонента питания;<br />
кп iн<br />
2<br />
– максимальное значение<br />
нормы i-го компонента питания.<br />
Первое граничное решение D1<br />
(см. рисунок 1) определяется по<br />
нижним значениям (кпiн1) интервалов<br />
норм, второе граничное решение<br />
D2 определяется по верхним<br />
значениям (кпiн2) интервалов<br />
норм.<br />
Для иллюстрации оптимизации<br />
рациона с учетом неопределенности<br />
норм кормления рассмотрим<br />
оптимизацию рациона по критерию<br />
«Максимальная прибыль» [10]<br />
для лактирующей коровы.<br />
Расчеты выполним с помощью<br />
программы «КОРАЛЛ – Кормление<br />
молочного скота» [11, 12] по показателям,<br />
представленным в диалоговом<br />
окне задания исходных<br />
данных (рисунок 2). Набор кормов<br />
для расчёта рациона показан на<br />
рисунке 3.<br />
Нормы суточного рациона для<br />
коровы с такими показателями<br />
возьмем из источников [2] и [4]<br />
(таблица 1).














