20221735C AP25 Autopilot Manual Swedish - Bryggan i Väst
20221735C AP25 Autopilot Manual Swedish - Bryggan i Väst
20221735C AP25 Autopilot Manual Swedish - Bryggan i Väst

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
Simrad <strong>AP25</strong> <strong>Autopilot</strong><br />
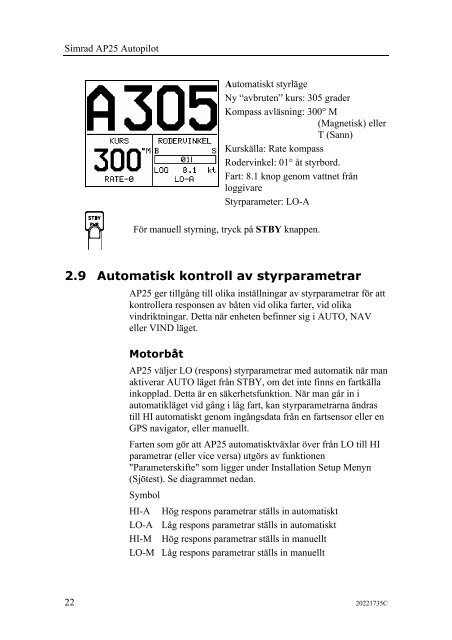
Automatiskt styrläge<br />
Ny “avbruten” kurs: 305 grader<br />
Kompass avläsning: 300° M<br />
(Magnetisk) eller<br />
T (Sann)<br />
Kurskälla: Rate kompass<br />
Rodervinkel: 01° åt styrbord.<br />
Fart: 8.1 knop genom vattnet från<br />
loggivare<br />
Styrparameter: LO-A<br />
För manuell styrning, tryck på STBY knappen.<br />
2.9 Automatisk kontroll av styrparametrar<br />
<strong>AP25</strong> ger tillgång till olika inställningar av styrparametrar för att<br />
kontrollera responsen av båten vid olika farter, vid olika<br />
vindriktningar. Detta när enheten befinner sig i AUTO, NAV<br />
eller VIND läget.<br />
Motorbåt<br />
<strong>AP25</strong> väljer LO (respons) styrparametrar med automatik när man<br />
aktiverar AUTO läget från STBY, om det inte finns en fartkälla<br />
inkopplad. Detta är en säkerhetsfunktion. När man går in i<br />
automatikläget vid gång i låg fart, kan styrparametrarna ändras<br />
till HI automatiskt genom ingångsdata från en fartsensor eller en<br />
GPS navigator, eller manuellt.<br />
Farten som gör att <strong>AP25</strong> automatisktväxlar över från LO till HI<br />
parametrar (eller vice versa) utgörs av funktionen<br />
"Parameterskifte" som ligger under Installation Setup Menyn<br />
(Sjötest). Se diagrammet nedan.<br />
Symbol<br />
HI-A Hög respons parametrar ställs in automatiskt<br />
LO-A Låg respons parametrar ställs in automatiskt<br />
HI-M Hög respons parametrar ställs in manuellt<br />
LO-M Låg respons parametrar ställs in manuellt<br />
22 <strong>20221735C</strong>