Dynamika II, 3. pÅednáška
Dynamika II, 3. pÅednáška
Dynamika II, 3. pÅednáška

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
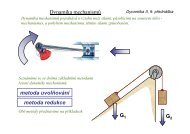
Obecný rovinný pohyb<strong>Dynamika</strong> <strong>II</strong>, <strong>3.</strong> přednáškaposuvnýpohybrotačnípohybobecný rovinnýpohybrovinný pohyb :Všechny body tělesase pohybují v navzájemrovnoběžných rovinách.Obecný rovinný pohyb je pohyb, který :- je rovinný,- není ani posuvný ani rotační.
Obecný rovinný pohyb <strong>Dynamika</strong> <strong>II</strong>, <strong>3.</strong> přednáškaTěleso, které koná obecný rovinný pohyb, může mít 1, 2 nebo 3 stupně volnosti.1 stupeň volnostirotace2 stupně volnostiposuvrotaceposuvposuv3 stupně volnosti
Obecný rovinný pohyb<strong>Dynamika</strong> <strong>II</strong>, <strong>3.</strong> přednáškarφ, ω, εrotace1 stupeň volnostivalení bez prokluzujeden nezávislý pohybx, v, aposuvvalení bez prokluzux, v, anezávislý posuv a rotace2 stupně volnostiφ, ω, εprokluz v bodě dotykudva nezávislé pohybyprokluz v bodě dotyku
Obecný rovinný pohyb<strong>Dynamika</strong> <strong>II</strong>, <strong>3.</strong> přednáškaKinematika se zabývá vyšetřováním rychlostí a zrychlení.Analytické řešení.Řešení rychlostí pólovou konstrukcí.Řešení základním rozkladem.
analytické řešeníObecný rovinný pohybAnalytické řešení je založeno na analytické geometriia na aplikaci základních zákonitostí kinematiky -- rychlost je derivací dráhy a zrychlení je derivací rychlosti.<strong>Dynamika</strong> <strong>II</strong>, <strong>3.</strong> přednáškava= s&= v&= & s=v ⋅dvdsy Bv rB, rB a BlAv rrA , a ATyč AB délky l se pohybuje tak,že bod A se smýká po vodorovné podlazerychlostí v Aa se zrychlením a A,bod B se smýká po svislé stěněrychlostí v Ba se zrychlením a B.Poloha bodu A je dána vodorovnou souřadnicí x A,poloha bodu B je dána svislou souřadnicí y Bod rohu stěny a podlahy.Pro rozměry x A, y B(proměnné souřadnice) a l(konstantní délka tyče) zjevně platí Pythagorova věta.x Av A, a Adáno,vypočtěte v B, a B
analytické řešeníAnalytické řešení je založeno na analytické geometriia na aplikaci základních zákonitostí kinematiky -- rychlost je derivací dráhy a zrychlení je derivací rychlosti.BObecný rovinný pohybzákladní schémax2A+úloha polohy2 2yy v rB , a rB= l − xAvBlA p( x A)BdyBdyBdxA− xAvB= = ⋅ = ⋅ v2Adt dx2Adt l − xAA AAv r, a rdvBdp dvAaB= = ⋅ vA+ p ⋅ řešenídt dt dt rychlostix Avdp dx A řešení zrychleníAaB= ⋅ ⋅ vA+ p ⋅aAv A, a Adáno,dxAdtvypočtěte v B, a B q( x A) dp 22aB= ⋅ vA+ p ⋅aA= q ⋅ vA+ p ⋅aAdxAy2B=l2<strong>Dynamika</strong> <strong>II</strong>, <strong>3.</strong> přednáškava= s&= v&= & s=v ⋅dvds
analytické řešeníAnalytické řešení je založeno na analytické geometriia na aplikaci základních zákonitostí kinematiky -- rychlost je derivací dráhy a zrychlení je derivací rychlosti.y Bv rB, rB a Bx Av A, a Adáno,vypočtěte v B, a BlaBA= −v rObecný rovinný pohybvrA , a A2A2 2 2xA+ yB= lv Av B2⋅xA⋅ x&A+ 2⋅yB⋅ y&B=+alternativní postupxvB⋅ vA+ yB⋅ vxA= − ⋅ vAyA B=Ba A00va= s&= v&= & s=ddta Bx&A⋅ vA+ xA⋅ v&A+ y&B⋅ vB+ yB⋅ v&B=22v + x ⋅a+ v + y ⋅a0vA A A B B B=2ByB+xA⋅aA= − v2A⋅<strong>Dynamika</strong> <strong>II</strong>, <strong>3.</strong> přednáška1yB⎛ ⋅ ⎜1 +⎝ddtxy2A2Bv ⋅0⎞⎟−⎠xydvdsAB⋅aA
analytické řešeníAnalytické řešení je založeno na analytické geometriia na aplikaci základních zákonitostí kinematiky -- rychlost je derivací dráhy a zrychlení je derivací rychlosti.y Bv rB, rB a Bx Av A, a Adáno,vypočtěte v B, a BlAv rObecný rovinný pohybrA , a APozor !vB= −l2xA− x2A<strong>Dynamika</strong> <strong>II</strong>, <strong>3.</strong> přednáška⋅ vAva= s&= v&= & s=x= −yAB⋅ vAv ⋅dvdsVe výsledku je velmi významné záporné znaménko.Podává informaci (jedinou informaci) o směru pohybu.Kladné znaménko znamená rychlost (zrychlení)ve směru narůstající souřadnice(vodorovně doprava, svisle nahoru).Záporné znaménko znamená rychlost (zrychlení)ve směru klesající souřadnice(vodorovně doleva, svisle dolů).Záporné znaménko ve výše uvedeném vzorci pak znamená,že při pohybu bodu A doprava bude bod B klesata naopak.Toto znaménko je jedinou informací o orientaci rychlostiresp. zrychlení.
analytické řešeníObecný rovinný pohybAnalytické řešení je založeno na analytické geometriia na aplikaci základních zákonitostí kinematiky -- rychlost je derivací dráhy a zrychlení je derivací rychlosti.y Bv rB, rB a Bx Alφω,εAv rrA , a AxAvAv Av AaAaA= l ⋅cosφdxAdxA= =dt dφ= −l ⋅ sin φ⋅φ&= −l⋅ω⋅ sin φdφ⋅dtvy BvBv Bv Ba= s&= v&= & s== l ⋅ sinφv ⋅dyBdy= =dt dφ= l ⋅cosφ⋅φ&= l ⋅ω⋅cosBφdvdsdφ⋅dtdvA= = −l⋅ω⋅ & sin φ − l ⋅ω⋅cosφ⋅φ&dt2= −l⋅ε ⋅ sin φ − l ⋅ω ⋅cosφdvBa = = l ⋅ω⋅ & cos φ − l ⋅ω⋅ sin φ⋅φ&Bdt2= l ⋅ε⋅cosφ − l ⋅ω ⋅ sin φaB<strong>Dynamika</strong> <strong>II</strong>, <strong>3.</strong> přednáška
analytické řešeníφ,ω,εObecný rovinný pohyb <strong>Dynamika</strong> <strong>II</strong>, <strong>3.</strong> přednáškaφ = 360º = 2·π ≅6,28 radcykloidarφφ·rxv,ax = 2·π·rvalení bez prokluzuxva= φ ⋅ r= ω⋅r= ε ⋅ rToto jsou tzv. vazbové rovnice.Jejich platnost je dána valivou vazbou mezi tělesem a podložkou.Udávají jednoznačný vztah mezi posuvem (x,v,a) a rotací (φ,ω,ε).
analytické řešeníArφ, ω, εrotaceObecný rovinný pohyb <strong>Dynamika</strong> <strong>II</strong>, <strong>3.</strong> přednáškar·sin(φ)φAúloha polohy1. x A= x + r ⋅ sin( φ)x A= r ⋅φ + r ⋅ sin( φ)= r ⋅( φ + sin( φ))( φ)y A= r + r ⋅cos= r ⋅ 1+cos( φ)( )<strong>3.</strong> aaAxAxx, v, avalení bez prokluzuřešení zrychleníaaAxAxposuvvalení bez prokluzux Ay A2.( 1+cos( φ)) + ω⋅r⋅ 0 − sin( φ)x Ax&= r ⋅ φ & + cos( φ)vAxv Ax( ⋅φ)= v&= ω⋅ & r ⋅&Axxva= φ ⋅ r= ω⋅r= ε ⋅ r2( 1+cos( φ)) − ω ⋅ r ⋅ ( φ)= ε⋅ r ⋅sin( )( ( )) ( )= v&= & ⋅ + φ + ⋅ − φ ⋅φ&Axv 1 cos v 0 sin2v= a ⋅( 1+cos( φ)) − ⋅ sin( φ)rřešení rychlosti( ⋅φ)= &A( 1+( φ))= ω⋅r⋅ cosaAyvAyy A= r ⋅ 0 − sin( φ)( ⋅φ)= y&&Av Ay= −ω⋅r⋅ sinv Ax= v⋅( 1+cos( φ)) = −v⋅ sin( φ)aaaAyAyAy( φ)( φ) − ω⋅ r ⋅cos( φ) ⋅φ= v&= −ω⋅ & r ⋅ sin&Ayv Ay( φ) − v⋅cos( φ) ⋅φ= v&= −v&⋅ sin&Ay2( φ) − ω ⋅ r ⋅ ( φ)= −ε⋅ r ⋅ sin cos2v= −a⋅ sin cosr( φ) − ⋅ ( φ)
analytické řešení Obecný rovinný pohyb <strong>Dynamika</strong> <strong>II</strong>, <strong>3.</strong> přednáškazobecněníúloha polohys = fs A, s B– tzv. zobecnělé souřadnice – délkové nebo úhlovéB( sA)vB=dsdtB=dsdsBA⋅dsdtAp =( sA)dsdsBAdsdtA=vAřešení rychlostivB= p( sA) ⋅ vvAA, v B– tzv. zobecnělé rychlosti – délkové nebo úhlovéaaaBBB===dvdtBdpdsqA=dds⋅dt⋅ v( p ⋅ v )A2dt⋅ v+ApA=dpdt+ p ⋅a⋅a( sA) A ( sA) AA⋅ vA+ p ⋅dvdtAdpq = =ds( sA) 2Adřešení zrychlenía A, a B– tzv. zobecnělá zrychlení – délková nebo úhlová2dssABdvA =dtaA
kinematická geometrieObecný rovinný pohyb<strong>Dynamika</strong> <strong>II</strong>, <strong>3.</strong> přednáškaAtrajektorie bodu AtBC’A’t+ΔtPočáteční a koncovou polohu všechbodů lze spojit navzájem soustřednýmikruhovými oblouky.Společný střed těchto oblouků budeležet ve společném průsečíku os úsečekAA’, BB’, CC’, atd.CπB’Těleso, jež se přemístí obecným rovinným pohybem z jisté výchozí do jisté koncové polohy,může se rovněž z téže výchozí do téže koncové polohy dostat otočením okolo jistého bodu(společného středu zmíněných kruhových oblouků).Tento bod se nazývá pól pohybu a značí se π (někdy též P).
kinematická geometrieObecný rovinný pohyb<strong>Dynamika</strong> <strong>II</strong>, <strong>3.</strong> přednáškatABC’rΔAtrajektorie bodu AA’rACrΔCrΔBB’t+ΔtrArv( t+Δt) A( t ) AAr r=+ Δr rΔAdrA= lim =Δt→0ΔtdtπRychlosti všech bodů tělesa při jeho skutečném pohybu (obecném rovinném pohybu)jsou stejné jako při náhradním (fiktivním) pohybu - rotaci okolo pólu.Pól pohybu leží na průsečíku normál.
kinematická geometrieObecný rovinný pohyb<strong>Dynamika</strong> <strong>II</strong>, <strong>3.</strong> přednáškaBn Bπy Bv rBln ATyč AB délky l se pohybuje tak,že bod A se smýká po vodorovné podlaze rychlostí v A,bod B se smýká po svislé stěně rychlostí v B.Av rABod A se pohybuje po vodorovné přímce,normála této trajektorie n Aje svislá.Bod B se pohybuje po svislé přímce, normálatéto trajektorie n Bje vodorovná.Na průsečíku těchto normál leží pól pohybu π.x A
kinematická geometrieObecný rovinný pohyb<strong>Dynamika</strong> <strong>II</strong>, <strong>3.</strong> přednáškaBn BπBn Bπy Bv rBln Ay Bv rBlωn AAv rAAv rAx Ax ARychlosti všech bodů můžeme vyšetřit tak,jako bychom řešili rotaci okolo pólu π.vB=vAx⋅yABvBvAvAω = =AπyB= ω⋅ Bπ = ω⋅ xA=vA⋅xyAB
kinematická geometrieObecný rovinný pohyb<strong>Dynamika</strong> <strong>II</strong>, <strong>3.</strong> přednáškaBn BπPólová konstrukce je založena na existencizvláštního bodu - pólu pohybu (značíme jej π).n Aωn CCv r CPro pól pohybu platí že rychlosti všech bodůpři obecném rovinném pohybu jsou stejné, jakokdyby těleso rotovalo okolo tohoto pólu.Pól pohybu leží na společném průsečíkunormál trajektorií všech bodů.Av r ATo platí pro všechny body tělesa,ne jen pro body A a B.Jen rychlosti !Ne zrychlení !
kinematická geometrieObecný rovinný pohyb<strong>Dynamika</strong> <strong>II</strong>, <strong>3.</strong> přednáškabod B se pohybuje po přímceBv rn Ba Bn =0Blπn Aa An =0A v rAbod B se pohybuje po kružniciBa rBnn Bωπn Aa rAAnbod A se pohybuje po přímceTento postup nelze aplikovat na zrychlení.Ve skutečnosti se oba body (A i B) pohybují po přímce,takže jejich normálové zrychlení je nulové.bod A se pohybuje po kružnician=2vRPři pomyslné rotaci okolo pólu se všakoba body pohybují po kružnici a majínenulové normálové zrychlení, což ješpatný výsledek.
kinematická geometrieObecný rovinný pohyb<strong>Dynamika</strong> <strong>II</strong>, <strong>3.</strong> přednáškaBπ (t-Δt)π (t)π (t+Δt)pevná polódieAPolódie je množina bodů, které byly, jsou nebo budou pólem.
kinematická geometrieObecný rovinný pohyb<strong>Dynamika</strong> <strong>II</strong>, <strong>3.</strong> přednáškaBπ (t-Δt)π (t)π (t+Δt)pevná polódiepohyblivá polódieObě polódie se navzájem dotýkají v pólu pohybu.APolódie je množina bodů, které byly, jsou nebo budou pólem.
kinematická geometrieObecný rovinný pohyb<strong>Dynamika</strong> <strong>II</strong>, <strong>3.</strong> přednáškaBCπ (t-Δt)Dπ (t)Cπ (t-Δt)π (t+Δt)π (t)pevná polódieDEπ (t+Δt)pevná polódiepohyblivá polódieπ (t+Δt)EApohyblivá polódieObecný rovinný pohyb lze chápat jako valení pohyblivé polódie po polódii pevné.
kinematická geometrie Obecný rovinný pohyb <strong>Dynamika</strong> <strong>II</strong>, <strong>3.</strong> přednáškaObecný rovinný pohyb lze chápat jako valení pohyblivé polódie po polódii pevné.BCπ (t-Δt)Dπ (t)pevná polódieEpohyblivá polódieπ (t+Δt)bod B se pohybuje po přímceBvalenípevná polódieObecný rovinný pohyb je technickyrealizován smýkáním bodů A a B povodorovné resp. svislé podložce.Polódie fyzicky neexistují, jsou pouzeabstraktními geometrickými objekty.Apohyblivá polódieAbod A se pohybuje po přímceObecný rovinný pohyb je technickyrealizován valením fyzicky existujícípohyblivé polódie po fyzickyexistující polódii pevné.
kinematická geometrieObecný rovinný pohyb<strong>Dynamika</strong> <strong>II</strong>, <strong>3.</strong> přednáškarφ, ω, εrotacex, v, aposuvvalení bez prokluzuvalení bez prokluzuPři valení tělesa po podložce je povrch tělesa (jeho obrys) pohyblivou polódií,podložka sama je polódií pevnou.Dotykový bod tělesa s podložkou je pólem pohybu.
kinematická geometrieObecný rovinný pohyb<strong>Dynamika</strong> <strong>II</strong>, <strong>3.</strong> přednáškavv = ω⋅rvπrpohyblivá polódiepevná polódievalení bez prokluzuPři valení tělesa po podložce je povrch tělesa (jeho obrys) pohyblivou polódií,podložka sama je polódií pevnou.Dotykový bod tělesa s podložkou je pólem pohybu.Jen rychlosti !Ne zrychlení !
kinematická geometrieObecný rovinný pohyb<strong>Dynamika</strong> <strong>II</strong>, <strong>3.</strong> přednáškatečna polódiíπ (t)t p
kinematická geometrieObecný rovinný pohyb<strong>Dynamika</strong> <strong>II</strong>, <strong>3.</strong> přednáškaBCπ (t-Δt)Dπ (t)v π2·Δtωπ (t+Δt)EAPólová rychlost v π je rychlost se kterou se střídají póly. Má směr tečny polódií t p.
kinematická geometrieObecný rovinný pohyb<strong>Dynamika</strong> <strong>II</strong>, <strong>3.</strong> přednáškaD ≡ πωDRychlost bodu, ležícího v pólu, je nulová.
kinematická geometrieObecný rovinný pohybπ (t-Δt)<strong>Dynamika</strong> <strong>II</strong>, <strong>3.</strong> přednáškaπ (t-Δt)CD (t-Δt)a rDπ (t)D (t)D (t+Δt)Eπ (t+Δt)vωCΔsrv Δ( t- t)rvD≡π (t)Δs( t + Δ t)π (t+Δt)t pω( t− Δt) = ω⋅ Δsv( t+Δt) = ω⋅ ΔsERychlost bodu, ležícího v pólu, je nulová.Zrychlení bodu, který leží v pólu, je nenulové, kolmé k tečně polódií.
kinematická geometrie Obecný rovinný pohybπ (t-Δt)Cπ (t)rvr( t + Δ t)<strong>Dynamika</strong> <strong>II</strong>, <strong>3.</strong> přednáškav Δ( t- t)DΔv rD (t)D (t-Δt)a rDD (t+Δt)Eπ (t+Δt)vtrvtrΔva D( − Δt) = ω⋅ Δsv( t+Δt) = ω⋅ Δs==rvr( t Δt) ( t+Δt)Δv2⋅Δt−+r+ Δrv( +Δt) = v( t−Δt) vΔs= ω⋅ΔtΔv= 2⋅ω⋅ΔsΔs=ΔtRychlost bodu, ležícího v pólu, je nulová.vπZrychlení bodu, který leží v pólu, je nenulové, kolmé k tečně polódií.a D= ω⋅ vπra Dr= vrπ× ω
kinematická geometrieObecný rovinný pohyb<strong>Dynamika</strong> <strong>II</strong>, <strong>3.</strong> přednáškaπ (t-Δt)Cπ (t)D (t)a rDD≡πv rπD (t-Δt)a rDD (t+Δt)Eπ (t+Δt)ωt pRychlost bodu, ležícího v pólu, je nulová.Zrychlení bodu, který leží v pólu, je nenulové, kolmé k tečně polódií.a Dv D= 0= ω⋅ vπra Dr= vrπ× ω
Střed křivosti trajektorie<strong>Dynamika</strong> <strong>II</strong>, <strong>3.</strong> přednáškaCo to je – střed křivosti trajektorie ?K čemu je střed křivosti trajektorie potřebný ?Jak určíme polohu středu křivosti trajektorie ?
Střed křivosti trajektorie<strong>Dynamika</strong> <strong>II</strong>, <strong>3.</strong> přednáškaCo to je – střed křivosti trajektorie ?Střed křivosti trajektorie je střed oskulační kružnice.Co to je – oskulační kružnice ?Oskulační kružnice je kružnice, daná třemi soumeznými body trajektorie.oskulační kružnicetrajektorie (dráha) bodu AAJe to kružnice, která se v nejširším úseku dotýká trajektorie.
Střed křivosti trajektorie<strong>Dynamika</strong> <strong>II</strong>, <strong>3.</strong> přednáškaK čemu je střed křivosti trajektorie potřebný ?Střed křivosti trajektorie je střed oskulační kružnice.Poloměr křivosti trajektorie je poloměr oskulační kružnice.an=2vRoskulační kružnicestřed křivosti trajektorie bodu Apoloměr křivosti trajektorie bodu ARS Aa ntrajektorie (dráha) bodu AAv
Střed křivosti trajektorie<strong>Dynamika</strong> <strong>II</strong>, <strong>3.</strong> přednáškaJak určíme polohu středu křivosti trajektorie ?Euler-Savaryho věta (početní metoda).Hartmannova konstrukce (grafická metoda).Bobillierova konstrukce (grafická metoda).Obálková věta.
Euler-Savaryho větaStřed křivosti trajektorie<strong>Dynamika</strong> <strong>II</strong>, <strong>3.</strong> přednáškapohyblivá polódieωsRn BS BrBπϑv rπt ppevná polódie
Euler-Savaryho větaStřed křivosti trajektorie<strong>Dynamika</strong> <strong>II</strong>, <strong>3.</strong> přednáškaωπrsϑRa nBv rπn BS Bt pan=2vR⎛1⎜⎝ r−1s⎞⎟ ⋅⎠ωsin ϑ = = κ = konstv πHodnota zlomku κ = ω/v πnezávisí na rychlosti pohybu.r – vzdálenost bodu od pólus – vzdálenost středu křivosti od póluR=s-r – poloměr křivosti trajektorieω i v πjsou kinematické veličiny, společné pro všechny body tělesa.Konstanta κ má tedy pro všechny body tělesa stejnou hodnotu.
Euler-Savaryho větaStřed křivosti trajektorie<strong>Dynamika</strong> <strong>II</strong>, <strong>3.</strong> přednáškarn AAπa nBn Ban=2vRS BRbod A : r – vzdálenost bodu od pólus → ∞ – vzdálenost středu křivosti od pólubod B : r – vzdálenost bodu od pólu⎛⎜⎝⎛⎜⎝1rs1 ⎞− ⎟ ⋅ sin90°∞ ⎠1−2 ⋅ r= −1s2 ⋅ r⎞⎟ ⋅⎠=κsin 45°=R = BSB = 2⋅2 ⋅raκ =κ =n=1r1r2vR
Střed křivosti trajektorieHartmannova (rychlostní) konstrukce<strong>Dynamika</strong> <strong>II</strong>, <strong>3.</strong> přednáškaStřed křivosti (S B) trajektorie bodu (B) leží na spojnici koncového bodu rychlosti (v B)a koncového bodu průmětu pólové rychlosti (v π ) do směru kolmého k normále.ωBn BS Bspojniceπv π·sinϑϑϑv r Bv rπpólová rychlostt pprůmět pólové rychlosti do směru kolmého k normále
Bobillierova konstrukceStřed křivosti trajektorie<strong>Dynamika</strong> <strong>II</strong>, <strong>3.</strong> přednáškaÚhel od normály jednoho bodu k tečně polódií je stejně velký, opačně orientovanýnež úhel od normály druhého bodu k ose kolineace.ABn A n BOK ABπS At pS B
Obálková větaStřed křivosti trajektorie<strong>Dynamika</strong> <strong>II</strong>, <strong>3.</strong> přednáškaStřed křivosti trajektorie středu křivosti výtvarné křivky leží ve středu křivosti obálky.výtvarná křivkaobálkavýtvarná křivkaAstřed křivosti výtvarné křivkytrajektorie středu křivosti výtvarné křivkyk 1k 2obálkastřed křivosti obálkyS Astřed křivosti trajektoriestředu křivosti výtvarné křivky
Obálková větaStřed křivosti trajektorie<strong>Dynamika</strong> <strong>II</strong>, <strong>3.</strong> přednáškaStřed křivosti trajektorie středu křivosti výtvarné křivky leží ve středu křivosti obálky.výtvarná křivkaobálkak BBkpAAS AS B∞
Obálková větaStřed křivosti trajektorie<strong>Dynamika</strong> <strong>II</strong>, <strong>3.</strong> přednáškaStřed křivosti trajektorie středu křivosti výtvarné křivky leží ve středu křivosti obálky.výtvarná křivkaobálkak AApS AB ∞ S Bk B
základní rozklad Obecný rovinný pohyb <strong>Dynamika</strong> <strong>II</strong>, <strong>3.</strong> přednáškaZákladní rozklad je umělá myšlenková konstrukce - představa obecného rovinného pohybujako „složeniny“ ze dvou současných pohybů - posuvu a rotace.posuvBBAB v posuvA v A Av Bv A+v rotacerotacesuperposice posuvného a rotačního pohybudáno : v A , a A - rychlost a zrychlení bodu A,vypočtěte : v B , a B - rychlost a zrychlení bodu B.
základní rozklad Obecný rovinný pohyb <strong>Dynamika</strong> <strong>II</strong>, <strong>3.</strong> přednáškaZákladní rozklad je umělá myšlenková konstrukce - představa obecného rovinného pohybujako „složeniny“ ze dvou současných pohybů - posuvu a rotace.posuvBBv posuv=v Av BAv Av Bv rotaceArotacev A=v BAA – referenční bodsuperposice posuvného a rotačního pohybuReferenční bod určuje oba současné pohyby :Posuv - posuv ve směru pohybu referenčního bodu.Rotace - rotace okolo referenčního bodu.Za referenční bod si zvolíme bod, pohybující se pojednoduché trajektorii (přímka, kružnice, ...).rvrvraBBBr= vr= vr= aB_posuvAAr+ vr+ a+BABArvB_rotace
Obecný rovinný pohybzákladní rozklad<strong>Dynamika</strong> <strong>II</strong>, <strong>3.</strong> přednáškav rBA+ v r BA= v rv Am vBvv BφAωvB= v BA ⊥ ABtan φlvAvvBA=B sinv AφφAω =v BAv= Al l ⋅ sin φ
základní rozkladaBBa B=φAlraa rω, εaA+ atanφAABAnr+ aObecný rovinný pohyb=raBA B+ a r BAna r BAt Ba BaBAna A=⎛⋅⎜sin φ +⎝costanφφ⎞⎟⎠= a rφa A+ a BAn || AB2BAvl= ω2⋅laA+ aBAn⋅cosφ − aBAt⋅ sin φ =a ⋅ sin φ + a ⋅cosφ =BAnaBAt=BAt<strong>Dynamika</strong> <strong>II</strong>, <strong>3.</strong> přednáškaaAaBAn+sin φ tan φφa BAt ⊥ AB0aBεvodorovněsvisle=m aa BAtl
základní rozkladv A,a AA – referenční bodrACφvalení bez prokluzuObecný rovinný pohybv A= ω⋅r= ε ⋅ ra Abω,εBrvyB=rvAr+ vposuv + rotaceψv rv rBA(⊥ BC)<strong>Dynamika</strong> <strong>II</strong>, <strong>3.</strong> přednáškaBAφv r BAx⊥ ABv BA= ω⋅bvB=v2B_ x+v2B_yvvB_xB _ x=vA+vBA _ x( r + b ⋅ φ)= ω⋅ cosvvB_ y=B _ yvBA _ y= ω⋅ b ⋅ sin φψ = arctanvvB_yB_xvB_xv ω = Ar⎛ b ⎞= vA⋅⎜1+⋅cosφ⎟⎝ r ⎠vB_yb= vA⋅ ⋅ sin φr
základní rozkladv A,a AA – referenční bodaBγrACφbvalení bez prokluzu=a2B_ x+= arctanaaaB_yB_x2B_yObecný rovinný pohybv A= ω⋅r= ε ⋅ ra Aω,εBaaB_xB_x=aAyγa rBrara+ aBBr= ar= aa r Aposuv + rotaceBA _ t _ xAArar+ ar+ aφra− aaBABA _ nBA _ txBA _ t⊥ ABr+ a|| ABBA _ naaBA _ tBA _ n _ xB_ y= aBA _ t _ y+2( r + b ⋅cosφ) − ω ⋅ b ⋅ φφBA _ na= ε ⋅ b2= ω ⋅bBA _ n _ y= ε ⋅sin2a = ε ⋅ b ⋅ sin φ + ω ⋅ b ⋅cosφB_y<strong>Dynamika</strong> <strong>II</strong>, <strong>3.</strong> přednáškaε=a Arω =v Ar
základní rozkladv A,a AA – referenční bodrACφbvalení bez prokluzuObecný rovinný pohybv A= ω⋅r= ε ⋅ ra Aω,εBya rBraraBBψγr= ar= aposuv + rotacerarB _ taB _ nAA⊥ BCr+ ar+ aψ|| BC<strong>Dynamika</strong> <strong>II</strong>, <strong>3.</strong> přednáškaBABA _ txr+ aBA _ naaBA _ tBA _ n= ε ⋅ b2= ω ⋅baBγ=a2B_ x+= arctanaaa B= a ⋅cos_ tBa B= a ⋅ sin_ nBaB_yB_x2B_y( γ − ψ)( γ − ψ)
Obsah dnešní přednášky :<strong>Dynamika</strong> <strong>II</strong>, <strong>3.</strong> přednáškaObecný rovinný pohyb tělesa.Obecný rovinný pohyb - kinematika,- analytické řešení,- kinematická geometrie,- základní rozklad.Děkuji za pozornost a příště nashledanou.