

PDF Version - Universität Osnabrück
PDF Version - Universität Osnabrück
PDF Version - Universität Osnabrück

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
8 KAPITEL 2. DER KURT3D ROBOTER UND DAS INTERFACE<br />
Abbildung 2.3: Die Buttonleise über dem 2D-Viewer.<br />
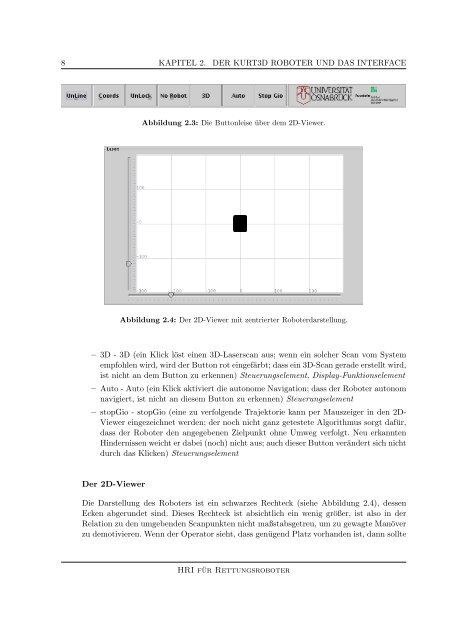
Abbildung 2.4: Der 2D-Viewer mit zentrierter Roboterdarstellung.<br />
– 3D - 3D (ein Klick löst einen 3D-Laserscan aus; wenn ein solcher Scan vom System<br />
empfohlen wird, wird der Button rot eingefärbt; dass ein 3D-Scan gerade erstellt wird,<br />
ist nicht an dem Button zu erkennen) Steuerungselement, Display-Funktionselement<br />
– Auto - Auto (ein Klick aktiviert die autonome Navigation; dass der Roboter autonom<br />
navigiert, ist nicht an diesem Button zu erkennen) Steuerungselement<br />
– stopGio - stopGio (eine zu verfolgende Trajektorie kann per Mauszeiger in den 2D-<br />
Viewer eingezeichnet werden; der noch nicht ganz getestete Algorithmus sorgt dafür,<br />
dass der Roboter den angegebenen Zielpunkt ohne Umweg verfolgt. Neu erkannten<br />
Hindernissen weicht er dabei (noch) nicht aus; auch dieser Button verändert sich nicht<br />
durch das Klicken) Steuerungselement<br />
Der 2D-Viewer<br />
Die Darstellung des Roboters ist ein schwarzes Rechteck (siehe Abbildung 2.4), dessen<br />
Ecken abgerundet sind. Dieses Rechteck ist absichtlich ein wenig größer, ist also in der<br />
Relation zu den umgebenden Scanpunkten nicht maßstabsgetreu, um zu gewagte Manöver<br />
zu demotivieren. Wenn der Operator sieht, dass genügend Platz vorhanden ist, dann sollte<br />
HRI für Rettungsroboter

