Profibus - W.E.ST. Elektronik GmbH
Profibus - W.E.ST. Elektronik GmbH
Profibus - W.E.ST. Elektronik GmbH

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
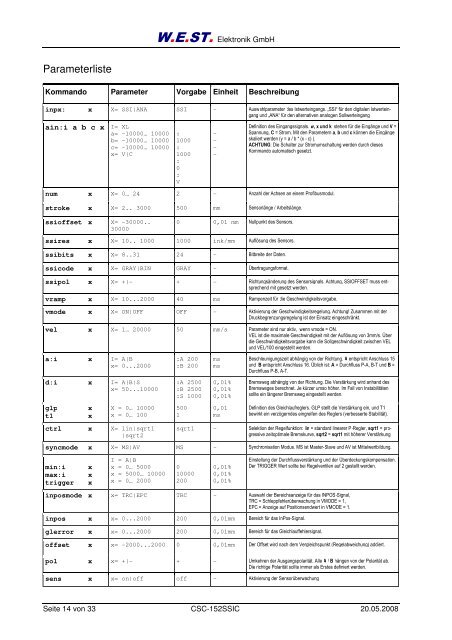
Parameterliste<br />
W.E.<strong>ST</strong>. <strong>Elektronik</strong> <strong>GmbH</strong><br />
Kommando Parameter Vorgabe Einheit Beschreibung<br />
inpx: x X= SSI|ANA SSI - Auswahlparameter des Istwerteingangs. „SSI“ für den digitalen Istwerteingang<br />
und „ANA“ für den alternativen analogen Sollwerteingang<br />
ain:i a b c x<br />
I= XL<br />
a= -10000… 10000<br />
b= -10000… 10000<br />
c= -10000… 10000<br />
x= V|C<br />
:<br />
1000<br />
:<br />
1000<br />
:<br />
0<br />
:<br />
V<br />
-<br />
-<br />
-<br />
-<br />
Definition des Eingangssignals. w, x und k stehen für die Eingänge und V =<br />
Spannung, C = Strom. Mit den Parametern a, b und c können die Eingänge<br />
skaliert werden (y = a / b * (x - c) ).<br />
ACHTUNG: Die Schalter zur Stromumschaltung werden durch dieses<br />
Kommando automatisch gesetzt.<br />
num x X= 0… 24 2 - Anzahl der Achsen an einem <strong>Profibus</strong>modul.<br />
stroke x X= 2.. 3000 500 mm Sensorlänge / Arbeitslänge.<br />
ssioffset x X= -30000..<br />
30000<br />
0 0,01 mm Nullpunkt des Sensors.<br />
ssires x X= 10.. 1000 1000 ink/mm Auflösung des Sensors.<br />
ssibits x X= 8..31 24 - Bitbreite der Daten.<br />
ssicode x X= GRAY|BIN GRAY - Übertragungsformat.<br />
ssipol x X= +|- + - Richtungsänderung des Sensorsignals. Achtung, SSIOFFSET muss entsprechend<br />
mit gesetzt werden.<br />
vramp x X= 10...2000 40 ms Rampenzeit für die Geschwindigkeitsvorgabe.<br />
vmode x X= ON|OFF OFF - Aktivierung der Geschwindigkeitsregelung. Achtung! Zusammen mit der<br />
Druckbegrenzungsregelung ist der Einsatz eingeschränkt.<br />
vel x<br />
a:i x<br />
X= 1… 20000<br />
I= A|B<br />
x= 0...2000<br />
d:i x I= A|B|S<br />
x= 50...10000<br />
glp x<br />
t1 x<br />
X = 0… 10000<br />
x = 0… 100<br />
ctrl x X= lin|sqrt1<br />
|sqrt2<br />
50<br />
:A 200<br />
:B 200<br />
:A 2500<br />
:B 2500<br />
:S 1000<br />
500<br />
1<br />
mm/s<br />
ms<br />
ms<br />
0,01%<br />
0,01%<br />
0,01%<br />
0,01<br />
ms<br />
Parameter sind nur aktiv, wenn vmode = ON.<br />
VEL ist die maximale Geschwindigkeit mit der Auflösung von 3mm/s. Über<br />
die Geschwindigkeitsvorgabe kann die Sollgeschwindigkeit zwischen VEL<br />
und VEL/100 eingestellt werden.<br />
Beschleunigungszeit abhängig von der Richtung. A entspricht Anschluss 15<br />
und B entspricht Anschluss 16. Üblich ist: A = Durchfluss P-A, B-T und B =<br />
Durchfluss P-B, A-T.<br />
Bremsweg abhängig von der Richtung. Die Verstärkung wird anhand des<br />
Bremsweges berechnet. Je kürzer umso höher. Im Fall von Instabilitäten<br />
sollte ein längerer Bremsweg eingestellt werden.<br />
Definition des Gleichlaufreglers. GLP stellt die Verstärkung ein, und T1<br />
bewirkt ein verzögerndes eingreifen des Reglers (verbesserte Stabilität).<br />
sqrt1 - Selektion der Regelfunktion: lin = standard linearer P-Regler, sqrt1 = progressive<br />
zeitoptimale Bremskurve, sqrt2 = sqrt1 mit höherer Verstärkung<br />
syncmode x X= MS|AV MS - Synchronisation Modus. MS ist Master-Slave und AV ist Mittelwertbildung.<br />
min:i x<br />
max:i x<br />
trigger x<br />
I = A|B<br />
x = 0… 5000<br />
x = 5000… 10000<br />
x = 0… 2000<br />
0<br />
10000<br />
200<br />
0,01%<br />
0,01%<br />
0,01%<br />
Einstellung der Durchflussverstärkung und der Überdeckungskompensation.<br />
Der TRIGGER Wert sollte bei Regelventilen auf 2 gestellt werden.<br />
inposmode x x= TRC|EPC TRC - Auswahl der Bereichsanzeige für das INPOS-Signal,<br />
TRC = Schleppfehlerüberwachung in VMODE = 1,<br />
EPC = Anzeige auf Positionsendwert in VMODE = 1.<br />
inpos x x= 0...2000 200 0,01mm Bereich für das InPos-Signal.<br />
glerror x x= 0...2000 200 0,01mm Bereich für das Gleichlauffehlersignal.<br />
offset x x= -2000...2000 0 0,01mm Der Offset wird nach dem Vergleichspunkt (Regelabweichung) addiert.<br />
pol x x= +|- + - Umkehren der Ausgangspolarität. Alle A / B hängen von der Polarität ab.<br />
Die richtige Polarität sollte immer als Erstes definiert werden.<br />
sens x x= on|off off - Aktivierung der Sensorüberwachung<br />
Seite 14 von 33 CSC-152SSIC 20.05.2008