

mathemasordinate - Fachgruppe Computeralgebra
mathemasordinate - Fachgruppe Computeralgebra
mathemasordinate - Fachgruppe Computeralgebra

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
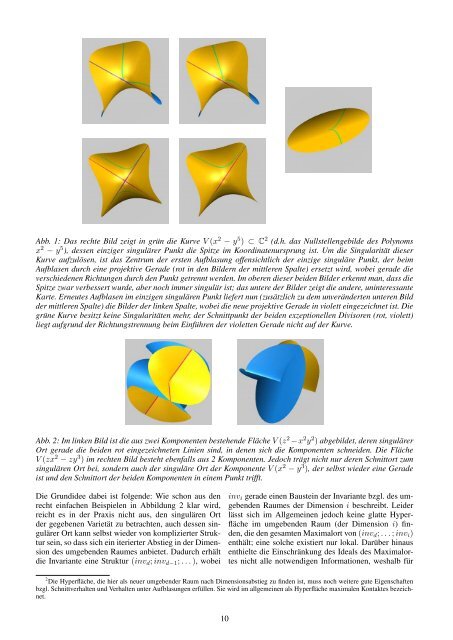
Abb. 1: Das rechte Bild zeigt in grün die Kurve V (x 2 − y 5 ) ⊂ C 2 (d.h. das Nullstellengebilde des Polynoms<br />
x 2 − y 5 ), dessen einziger singulärer Punkt die Spitze im Koordinatenursprung ist. Um die Singularität dieser<br />
Kurve aufzulösen, ist das Zentrum der ersten Aufblasung offensichtlich der einzige singuläre Punkt, der beim<br />
Aufblasen durch eine projektive Gerade (rot in den Bildern der mittleren Spalte) ersetzt wird, wobei gerade die<br />
verschiedenen Richtungen durch den Punkt getrennt werden. Im oberen dieser beiden Bilder erkennt man, dass die<br />
Spitze zwar verbessert wurde, aber noch immer singulär ist; das untere der Bilder zeigt die andere, uninteressante<br />
Karte. Erneutes Aufblasen im einzigen singulären Punkt liefert nun (zusätzlich zu dem unveränderten unteren Bild<br />
der mittleren Spalte) die Bilder der linken Spalte, wobei die neue projektive Gerade in violett eingezeichnet ist. Die<br />
grüne Kurve besitzt keine Singularitäten mehr, der Schnittpunkt der beiden exzeptionellen Divisoren (rot, violett)<br />
liegt aufgrund der Richtungstrennung beim Einführen der violetten Gerade nicht auf der Kurve.<br />
Abb. 2: Im linken Bild ist die aus zwei Komponenten bestehende Fläche V (z 2 −x 2 y 2 ) abgebildet, deren singulärer<br />
Ort gerade die beiden rot eingezeichneten Linien sind, in denen sich die Komponenten schneiden. Die Fläche<br />
V (zx 2 − zy 3 ) im rechten Bild besteht ebenfalls aus 2 Komponenten. Jedoch trägt nicht nur deren Schnittort zum<br />
singulären Ort bei, sondern auch der singuläre Ort der Komponente V (x 2 − y 3 ), der selbst wieder eine Gerade<br />
ist und den Schnittort der beiden Komponenten in einem Punkt trifft.<br />
Die Grundidee dabei ist folgende: Wie schon aus den<br />
recht einfachen Beispielen in Abbildung 2 klar wird,<br />
reicht es in der Praxis nicht aus, den singulären Ort<br />
der gegebenen Varietät zu betrachten, auch dessen singulärer<br />
Ort kann selbst wieder von komplizierter Struktur<br />
sein, so dass sich ein iterierter Abstieg in der Dimension<br />
des umgebenden Raumes anbietet. Dadurch erhält<br />
die Invariante eine Struktur (invd; invd−1; . . . ), wobei<br />
invi gerade einen Baustein der Invariante bzgl. des umgebenden<br />
Raumes der Dimension i beschreibt. Leider<br />
lässt sich im Allgemeinen jedoch keine glatte Hyperfläche<br />
im umgebenden Raum (der Dimension i) finden,<br />
die den gesamten Maximalort von (invd; . . . ; invi)<br />
enthält; eine solche existiert nur lokal. Darüber hinaus<br />
enthielte die Einschränkung des Ideals des Maximalortes<br />
nicht alle notwendigen Informationen, weshalb für<br />
2 Die Hyperfläche, die hier als neuer umgebender Raum nach Dimensionsabstieg zu finden ist, muss noch weitere gute Eigenschaften<br />
bzgl. Schnittverhalten und Verhalten unter Aufblasungen erfüllen. Sie wird im allgemeinen als Hyperfläche maximalen Kontaktes bezeichnet.<br />
10













