Stellaris Roboter Modell - Berner Fachhochschule
Stellaris Roboter Modell - Berner Fachhochschule
Stellaris Roboter Modell - Berner Fachhochschule

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
<strong>Stellaris</strong> <strong>Roboter</strong> <strong>Modell</strong> Knotenbeschreibung<br />
4.2.2 <strong>Roboter</strong>arm Links (5) und Rechts(6)<br />
Die <strong>Roboter</strong>arme nehmen die ECTS vom jeweiligen (linken oder rechten) Förderband und legen es auf das<br />
mittlere Förderband ab. Die <strong>Roboter</strong>arme Links und Rechts unterscheiden sich nicht.<br />
Kit<br />
Bild 10: <strong>Roboter</strong>arm Links<br />
<strong>Roboter</strong>arm<br />
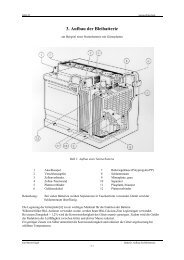
Sie bestehen aus einem Arm aus Aluminium mit sieben Servomotoren als Antrieb. Die Achsen werden von den<br />
Servomotoren mit den im Bild 12 angegeben Nummern angetrieben. Die Schulter und der Ellbogen bestehen aus<br />
je zwei Servomotoren, die spiegelverkehrt montiert sind. Diese müssen synchron betrieben werden.<br />
Der <strong>Roboter</strong>arm-Knoten erhält von der Steuerung die Position und Geschwindigkeit einer einzelnen Achse oder<br />
die Positionen für den gesamten Arm. Er muss die Servomotoren mit diesen Daten an die gewünschte Position<br />
bewegen.<br />
Schulter 2, 3<br />
Basis, 1<br />
Bild 12: <strong>Roboter</strong>arm mit Achsen<br />
Ellbogen 4, 5<br />
Bild 11: <strong>Roboter</strong>arm Rechts<br />
Die möglichen Positionen und Geschwindigkeiten der verschiedenen Achsen sind im Anhang A.4 <strong>Roboter</strong>arm<br />
Links und Rechts (S. 15) aufgelistet.<br />
Marcel Jost 1.3.144 Seite 11<br />
Kit<br />
Hand 6<br />
Greifer 7<br />
<strong>Roboter</strong>arm