Stellaris Roboter Modell - Berner Fachhochschule
Stellaris Roboter Modell - Berner Fachhochschule
Stellaris Roboter Modell - Berner Fachhochschule

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
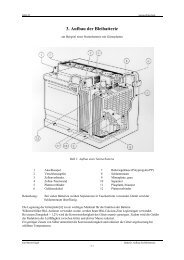
<strong>Stellaris</strong> <strong>Roboter</strong> <strong>Modell</strong> Knotenbeschreibung<br />
4.1.1 Förderband Links (1) und Rechts (3)<br />
Die Förderbänder Links und Rechts übernehmen die ECTS vom Verteiler und befördern sie zur Position 3a<br />
respektive 3b. Damit die ECTS vom <strong>Roboter</strong>arm aufgenommen werden können, müssen sie an einer bestimmten<br />
Position gestoppt werden.<br />
Motor<br />
Bild 5: Förderband Links<br />
Kit L2 L1<br />
Die Knoten der Förderbänder Links und Rechts unterscheiden sich nur darin, dass sie Spiegelverkehrt aufgebaut<br />
sind.<br />
4.1.2 Förderband Mitte (2)<br />
Auf dem Förderband Mitte werden die ECTS von den<br />
<strong>Roboter</strong>armen abgelegt und zum Verteiler<br />
transportiert. Dort werden sie vom Verteiler entweder<br />
auf das Förderband Links oder Rechts geschoben.<br />
Motor<br />
Bild 7: Förderband Mitte<br />
Marcel Jost 1.3.144 Seite 9<br />
Kit<br />
L1<br />
L2<br />
Bild 6: Förderband Rechts<br />
L1<br />
Kit<br />
L2<br />
Motor