

Kinematik der geradlinigen Bewegung Grundbegriffe - TU Wien
Kinematik der geradlinigen Bewegung Grundbegriffe - TU Wien
Kinematik der geradlinigen Bewegung Grundbegriffe - TU Wien

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
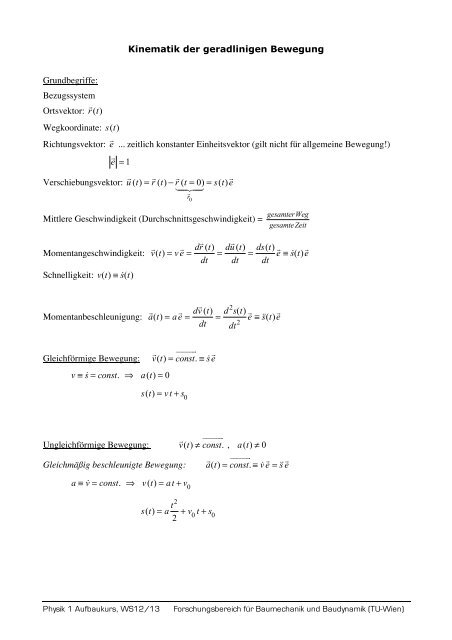
<strong>Grundbegriffe</strong>:<br />
Bezugssystem<br />
�<br />
Ortsvektor: r (t)<br />
Wegkoordinate: s(t)<br />
<strong>Kinematik</strong> <strong>der</strong> <strong>geradlinigen</strong> <strong>Bewegung</strong><br />
Richtungsvektor: � e ... zeitlich konstanter Einheitsvektor (gilt nicht für allgemeine <strong>Bewegung</strong>!)<br />
�<br />
e = 1<br />
�<br />
Verschiebungsvektor: u (t) = � r (t) − � r (t = 0)<br />
�� � �� = s(t) � e<br />
Mittlere Geschwindigkeit (Durchschnittsgeschwindigkeit) =<br />
Momentangeschwindigkeit:<br />
Schnelligkeit:<br />
v(t) ≡ �s(t)<br />
Momentanbeschleunigung:<br />
Gleichförmige <strong>Bewegung</strong>:<br />
v ≡ �s = const. ⇒ a(t) = 0<br />
�<br />
r0 �<br />
v(t) = v � e = d� r (t)<br />
dt = d� u (t)<br />
dt<br />
�<br />
a(t) = a � e = d� v (t)<br />
dt = d 2 s(t)<br />
� ������ v(t) = const. ≡ �s � e<br />
s(t) = vt + s 0<br />
= ds(t)<br />
dt<br />
gesamterWeg<br />
gesamteZeit<br />
�<br />
e ≡ �s(t) � e<br />
Physik 1 Aufbaukurs, WS12/13 Forschungsbereich für Baumechanik und Baudynamik (<strong>TU</strong>-<strong>Wien</strong>)<br />
dt 2<br />
�<br />
e ≡ ��s(t) � e<br />
� ������ Ungleichförmige <strong>Bewegung</strong>: v(t) ≠ const. , a(t) ≠ 0<br />
� ������ Gleichmäßig beschleunigte <strong>Bewegung</strong>: a(t) = const. ≡ �v � e = ��s � e<br />
a ≡ �v = const. ⇒ v(t) = at + v 0<br />
s(t) = a t2<br />
2 + v 0 t + s 0
�<br />
v(t) = v(t) � e t (t)<br />
Richtungsvektor:<br />
�<br />
a(t) = d� v (t)<br />
dt<br />
<strong>Kinematik</strong> <strong>der</strong> kreisförmigen <strong>Bewegung</strong><br />
�<br />
e = � e t (t) ... Einheitsvektor, jedoch zeitlich verän<strong>der</strong>lich; zeigt zu jedem Zeitpunkt<br />
= dv(t)<br />
dt<br />
↑<br />
in Tangentenrichtung <strong>der</strong> Kreisbahn<br />
�<br />
et (t) + v(t) d� et (t)<br />
dt = ��s(t) � et (t)<br />
�� � �� + v(t) � et � (t)<br />
�� � ��<br />
Produktregel für Differentiation<br />
�<br />
a t = a t (t) � e t (t) ≡ ��s(t) � e t (t)...Vektor <strong>der</strong> Tangentialbeschleunigung<br />
�<br />
a n (t) … Vektor <strong>der</strong> Normalbeschleunigung<br />
Gleichförmige Kreisbewegung:<br />
�<br />
a(t) = d� v (t)<br />
dt = � 0 + v(t) ��e t (t) = v d� et ds<br />
Herleitung <strong>der</strong> FRENETschen Formel<br />
"Infinitesimale Geometrie":<br />
"Strahlensatz" (ähnliche Dreiecke):<br />
Physik 1 Aufbaukurs, WS12/13 Forschungsbereich für Baumechanik und Baudynamik (<strong>TU</strong>-<strong>Wien</strong>)<br />
�<br />
at �<br />
an �s ≡ v = const. ⇒ ��s ≡ at = 0<br />
ds<br />
dt = v2 d� e t<br />
ds<br />
d � e t<br />
ds<br />
1 �<br />
= en :<br />
r<br />
= v2<br />
r<br />
�<br />
e n = � a n (t)<br />
�<br />
e t (t + dt) = � e t (t) + d � e t = � e t (t) + d � e t<br />
d � e t<br />
�<br />
e t<br />
= ds<br />
r<br />
d � et ds = d� et ds<br />
⇒ d� e t<br />
ds<br />
�<br />
en = 1 �<br />
r<br />
e n<br />
= 1<br />
r<br />
�<br />
e n<br />
�<br />
( et = 1)<br />
d� et ⊥ � ( et )














