Schaltnetze und Schaltwerke (update 9.1.03) - FZK
Schaltnetze und Schaltwerke (update 9.1.03) - FZK
Schaltnetze und Schaltwerke (update 9.1.03) - FZK

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
Hartmut Gemmeke<br />
Forschungszentrum Karlsruhe, IPE<br />
gemmeke@ipe.fzk.de<br />
Tel.: 07247-82-5635<br />
WS2002/2003<br />
Einführung in die Elektronik<br />
für Physiker<br />
<strong>Schaltnetze</strong> <strong>und</strong> <strong>Schaltwerke</strong><br />
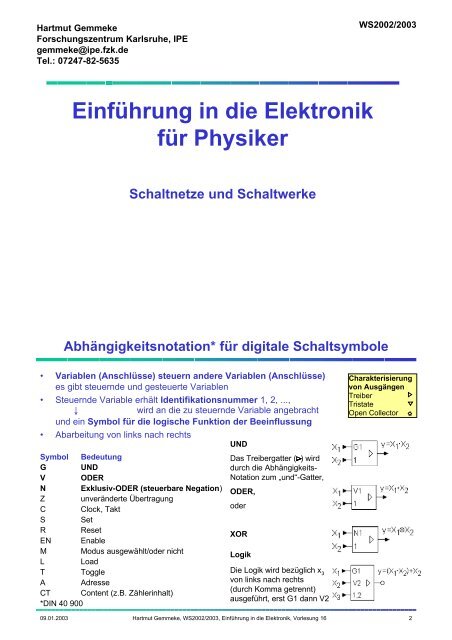
Abhängigkeitsnotation* für digitale Schaltsymbole<br />
• Variablen (Anschlüsse) steuern andere Variablen (Anschlüsse)<br />
es gibt steuernde <strong>und</strong> gesteuerte Variablen<br />
• Steuernde Variable erhält Identifikationsnummer 1, 2, ...,<br />
↓<br />
wird an die zu steuernde Variable angebracht<br />
<strong>und</strong> ein Symbol für die logische Funktion der Beeinflussung<br />
• Abarbeitung von links nach rechts<br />
UND<br />
Symbol Bedeutung<br />
G UND<br />
V ODER<br />
N Exklusiv-ODER (steuerbare Negation)<br />
Z unveränderte Übertragung<br />
C Clock, Takt<br />
S Set<br />
R Reset<br />
EN Enable<br />
M Modus ausgewählt/oder nicht<br />
L Load<br />
T Toggle<br />
A Adresse<br />
CT Content (z.B. Zählerinhalt)<br />
*DIN 40 900<br />
Das Treibergatter ( ) wird<br />
durch die Abhängigkeits-<br />
Notation zum „<strong>und</strong>“-Gatter,<br />
ODER,<br />
oder<br />
XOR<br />
Logik<br />
∆<br />
Die Logik wird bezüglich x 3<br />
von links nach rechts<br />
(durch Komma getrennt)<br />
ausgeführt, erst G1 dann V2<br />
Charakterisierung<br />
von Ausgängen<br />
Treiber<br />
Tristate<br />
Open Collector<br />
09.01.2003 Hartmut Gemmeke, WS2002/2003, Einführung in die Elektronik, Vorlesung 16 2
Beispiele zur Abhängigkeitsnotation I<br />
• Zwei 2:1 Multiplexer<br />
ein Steuereingang beeinflusst mehrere Eingänge,<br />
der Negationsstrich über der Nummer der<br />
Steuervariablen zeigt an , dass die negierte<br />
Steuervariable in der Verknüpfung zu benutzen ist. Das<br />
≥1 Zeichen bezeichnet das „oder“ für den Ausgang. Die<br />
horizontalen Trennstriche teilen die einzelnen<br />
Logikbereiche für den Ausgang ab.<br />
a<br />
G1<br />
d 0 1<br />
d 1 1<br />
d 2 1<br />
d 3 1<br />
≥1 y 0=a . d 0 +a . d 1<br />
≥1 y 1=a . d 2 +a . d 3<br />
• 4:1 Multiplexer<br />
hier sind zwei Steueranschlüsse a 0 <strong>und</strong> a 1 durch die<br />
geschweifte Klammer zu einer Steuervariablen mit dem<br />
0<br />
Wertebereich 0bis 3=<br />
zusammengefasst, d.h. d 0 wird<br />
3<br />
nur erfasst, wenn a 0 <strong>und</strong> a 1 = 0 sind, oder d 3 , wenn a 0<br />
<strong>und</strong> a 1 = 1 sind.<br />
a 0 0<br />
a 1 1<br />
d 0 0<br />
d 1 1<br />
d 2 2<br />
d 3 3<br />
G 0 3<br />
≥1 y=a 0 . a 1<br />
. d0 +...<br />
09.01.2003 Hartmut Gemmeke, WS2002/2003, Einführung in die Elektronik, Vorlesung 16 3<br />
Beispiele zur Abhängigkeitsnotation II<br />
Vorwärts-/Rückwärtszähler mit synchronen<br />
Ladeeingängen <strong>und</strong> steuernder Wirkung<br />
eines Inhaltes (Content CT)<br />
• 3 Betriebsarten (0 - 2) Modus M:<br />
0 (Load=0 & Up=0): abwärts zählen (-), wenn<br />
Enable(4) = 1<br />
1 synchron mit dem Takt (C) Daten D laden<br />
1, 5 D (D für Daten zusätzlich eingeführte<br />
Identifikation für die Eingänge d 0 - d 3 )<br />
2 Notation 2,4+ bedeutet Zählerstand<br />
inkrementieren, wenn Enable(4) = 1<br />
• Übertragsausgang* CO wird vom<br />
Zählerinhalt CT gesteuert, d.h. = 1 wenn:<br />
– Wenn beim Vorwärtszählen (Modus 2) der<br />
Zählerinhalt 15 beträgt (2,4 CT=15) bzw.<br />
– Wenn beim Abwärtszählen (Modus 0) der<br />
Inhalt des Zählers 0 ist (0,4 CT=0)<br />
– In beiden Fällen muss Enable(4) = 1 sein<br />
*counter overrange<br />
Load<br />
Up/Down<br />
Enable<br />
Clk<br />
d<br />
d<br />
d<br />
d<br />
0<br />
1<br />
2<br />
3<br />
0⎫<br />
0<br />
⎬M<br />
1⎭<br />
2<br />
04 , CT = 0/ 24 , CT = 15 CO<br />
EN4<br />
04 , − / 1, C5/ 24 , +<br />
15 , D<br />
15 , D<br />
15 , D<br />
15 , D<br />
09.01.2003 Hartmut Gemmeke, WS2002/2003, Einführung in die Elektronik, Vorlesung 16 4
Systematik digitaler Schaltungen<br />
1. <strong>Schaltnetze</strong><br />
x 1<br />
= digitale Schaltungen ohne Speicher<br />
x 2<br />
.<br />
= kombinatorische Logik<br />
.<br />
.<br />
.<br />
= Vektoren boolescher Funktionen<br />
.<br />
.<br />
.<br />
.<br />
.<br />
.<br />
2. <strong>Schaltwerke</strong> (finit state machine, FSM)<br />
.<br />
= <strong>Schaltnetze</strong> für m Eingangsvariable,<br />
n Zustands- <strong>und</strong> o Ausgangs-Variable<br />
+ Speicher für Zustandsvariablen Z<br />
+ Rückführung der Zustandsvariablen m<br />
auf den Eingang<br />
Schaltnetz<br />
X<br />
+ Taktgeber<br />
→ Y = f(X,Z)<br />
= Ausgangsvektor<br />
→ X = Eingangsvektor<br />
→ Z(t k ) = letzter Zustandsvektor<br />
zur Zeit t k<br />
Schaltnetz<br />
y 1<br />
y 2<br />
.<br />
.<br />
Ausgangsvektor<br />
.<br />
.<br />
.<br />
y = f(x 1 ,...x n<br />
.<br />
)<br />
.<br />
y m<br />
x n<br />
Z(t k +1)<br />
n<br />
Z(t k )<br />
o<br />
Y(X,Z)<br />
Zustandsvariablen<br />
Speicher<br />
φ Takt<br />
09.01.2003 Hartmut Gemmeke, WS2002/2003, Einführung in die Elektronik, Vorlesung 16 5<br />
Beispiele für <strong>Schaltnetze</strong> I<br />
• Dekoder 1 aus 4<br />
• Anwendung: aus binärer Adresse ein Gatter oder Chip selektieren:<br />
n<br />
a 1<br />
a 0<br />
y 3<br />
y 2<br />
y 1<br />
y 0<br />
Negation<br />
0<br />
1<br />
2<br />
3<br />
0 0<br />
0 1<br />
1 0<br />
1 1<br />
a0⋅a1 a0 ⋅a1 a0⋅a1 a0⋅a1<br />
0 0 0 1<br />
0 0 1 0<br />
0 1 0 0<br />
1 0 0 0<br />
einlagiges<br />
Netz<br />
09.01.2003 Hartmut Gemmeke, WS2002/2003, Einführung in die Elektronik, Vorlesung 16 6
Beispiele für <strong>Schaltnetze</strong> II<br />
• Multiplexer 4:1<br />
– Es gibt verschiedene Eingangsinformationen d 0 – d 3 .<br />
Eine Datenleitung d i soll mit den binären Selektoren<br />
a 0 , a 1 , d.h. einem Dekoder, ausgewählt <strong>und</strong> auf eine<br />
Ausgangsleitung y geschaltet werden<br />
a 0 0<br />
a 1 1<br />
d 0 0<br />
d 1 1<br />
d 2 2<br />
d 3 3<br />
G 0 3<br />
≥1 y=a 0 . a 1<br />
. d0 +...<br />
09.01.2003 Hartmut Gemmeke, WS2002/2003, Einführung in die Elektronik, Vorlesung 16 7<br />
Rechenwerk als Beispiel für <strong>Schaltnetze</strong> I<br />
• Halbaddierer (ohne Übertrag einer Vorstufe):<br />
– 0 + 0 = 0, Summe Σ =0<br />
– 1 + 0 = 0 + 1 = 1, Summe Σ =1<br />
– 1 + 1 = 10, d.h. Summe Σ =0 <strong>und</strong> Carry (Übertrag) C = 1<br />
a b<br />
0 0<br />
0 1<br />
1 0<br />
1 1<br />
Σ C<br />
0 0<br />
1 0<br />
1 0<br />
0 1<br />
Σ = a ⊕ b<br />
C = a ⋅ b<br />
09.01.2003 Hartmut Gemmeke, WS2002/2003, Einführung in die Elektronik, Vorlesung 16 8
Rechenwerk als Beispiel für <strong>Schaltnetze</strong> II<br />
• Volladdierer ⇔ Carry der Vorstufe berücksichtigt<br />
0 0 0<br />
0 0 1<br />
0 1 0<br />
0 1 1<br />
1 0 0<br />
1 0 1<br />
1 1 0<br />
1 1 1<br />
Σ i<br />
C i<br />
C i -1 a i b i<br />
Symbol für Volladdierer<br />
0 0<br />
1 0<br />
1 0<br />
0 1<br />
1 0<br />
0 1<br />
0 1<br />
1 1<br />
C<br />
Σ<br />
1<br />
2<br />
Σ i<br />
= (a i<br />
⊕ b i<br />
) ⊕ C i-1<br />
C i<br />
= a i<br />
⋅ b i<br />
+ C i-1<br />
⋅ (a i<br />
⊕ b i<br />
)<br />
09.01.2003 Hartmut Gemmeke, WS2002/2003, Einführung in die Elektronik, Vorlesung 16 9<br />
Rechenwerke III<br />
• Beispiel: duale Addition von A = 13 <strong>und</strong> B = 9 mit einem 4-Bit Addierer<br />
• A = 13 1 1 0 1<br />
• B = 9 1 0 0 1<br />
--------------------------------<br />
• 1 0 1 1 0 = Σ<br />
C 4 = Übertrag für den nächsten Addierer<br />
• Binäre Zahlendarstellung mit beliebigen Vorzeichen<br />
– „führendes“ Bit = Vorzeichen: 0 = + , 1 = −<br />
– Standard-Darstellung: a = ( sign(a), ⎜a⎟ ) (Problem, 0 kommt 2-mal vor, Rechenwerk muss für<br />
Subtraktion umgestellt werden)<br />
• Subtraktion = Addition einer negativen Zahl<br />
⇒ Zweier-Komplement = Einer-Komplement +1<br />
• z.B. Darstellung von -1 oder eine Subtraktion 13 - 1 =12<br />
sign sign<br />
• 1 0 0 0 0 1 13 0 1 1 0 1<br />
• 1-Komplement 1 1 1 1 0 -1 1 1 1 1 1<br />
• +1 0 0 0 0 1<br />
---------------------------------------------------------------------------------------------------------<br />
• -1 = 1 1 1 1 1 Σ = 12 (1) 0 1 1 0 0<br />
09.01.2003 Hartmut Gemmeke, WS2002/2003, Einführung in die Elektronik, Vorlesung 16 10
Rechenwerke IV<br />
• Zahlendarstellung für n = 4 im 2er-Komplement<br />
– positive Zahlen bis 2 n –1 negative Zahlen bis 2 n<br />
0 0 0 0 0 0 0 0 0 0 0 0<br />
1 0 0 0 0 1 -1 1 1 1 1 1<br />
2 0 0 0 1 0 -2 1 1 1 1 0<br />
3 0 0 0 1 1 -3 1 1 1 0 1<br />
: :<br />
15 0 1 1 1 1 -15 1 0 0 0 1<br />
-16 1 0 0 0 0<br />
• 4-Bit Volladdierer in Hardware<br />
Summe<br />
0<br />
• Summe A+B für C 0<br />
= 0<br />
• Differenz (A-B) = A + B + 1<br />
mit C 0<br />
= 1 !!<br />
Differenz<br />
1<br />
09.01.2003 Hartmut Gemmeke, WS2002/2003, Einführung in die Elektronik, Vorlesung 16 11<br />
Schaltwerk = sequentielle Logik<br />
• Beschreibung:<br />
– Schaltung<br />
– Zustandsfolge-Tabelle, -Funktion<br />
– Flussdiagramm<br />
– Zustandsdiagramm, -graph<br />
• Zustandsdiagramm besteht aus<br />
Power-on<br />
Zustandsdiagramm<br />
S 0 S 1<br />
x 0<br />
S 2<br />
– Knoten, die den Zustand S k<br />
beschreiben, <strong>und</strong><br />
– Kanten, die die Übergangsbedingungen<br />
x i zwischen den<br />
Zuständen definieren.<br />
• Beispiel: für ein Zustandsdiagramm<br />
– S0: Anfangszustand nach Power-on<br />
– S1: Übergangszustand<br />
– S2: Verzweigungszustand<br />
– S3: Wartezustand<br />
x 3<br />
x 3<br />
x 2<br />
x 1<br />
x 2<br />
S 3<br />
09.01.2003 Hartmut Gemmeke, WS2002/2003, Einführung in die Elektronik, Vorlesung 16 12
Beispiele <strong>Schaltwerke</strong> I<br />
Asynchrones RS-Flip-Flop mit NOR-Gattern (ungetaktet)<br />
Schaltung Wahrheitstafel Impulsdiagramm Flussdiagramm<br />
R<br />
S<br />
≥1<br />
≥1<br />
q<br />
q<br />
S<br />
R<br />
0 0<br />
0 1<br />
1 0<br />
1 1<br />
Q<br />
Q -1<br />
0<br />
1<br />
(0)<br />
S=R=1 nicht definiert,<br />
schaltungsabhängig<br />
[s,r]=[0,x],([1,1])<br />
q=0<br />
s<br />
r<br />
q<br />
t<br />
t<br />
t<br />
n<br />
y<br />
s = 0<br />
n<br />
q = 0<br />
s = 0<br />
n<br />
r = 0<br />
y<br />
y<br />
n<br />
[s,r] = [0,1]<br />
q=1<br />
[s,r]=[x,0]<br />
[s,r] = [1,0]<br />
für<br />
beliebigen<br />
Zustand x<br />
Zustandsdiagramm<br />
q<br />
S<br />
R<br />
q<br />
Schaltungssymbol<br />
r = 0<br />
y<br />
q = 1<br />
09.01.2003 Hartmut Gemmeke, WS2002/2003, Einführung in die Elektronik, Vorlesung 16 13<br />
Beispiele <strong>Schaltwerke</strong> II<br />
• Beispiel: RS-Flipflop mit NAND-Gattern<br />
• Anwendung:<br />
Entprellung einer mechanischen Taste<br />
(Tastatur schwingt nach) <strong>und</strong> hat eine<br />
mechanische Umschaltzeit t u<br />
• Wegen der Beschaltung tritt der Zustand<br />
S=R=0 nicht ein<br />
S<br />
R<br />
0 0<br />
0 1<br />
1 0<br />
1 1<br />
Q<br />
(1)<br />
0<br />
1<br />
Q -1<br />
09.01.2003 Hartmut Gemmeke, WS2002/2003, Einführung in die Elektronik, Vorlesung 16 14
<strong>Schaltwerke</strong>: Elementare Kippschaltungen<br />
• Definition: Kippschaltung = digitale Schaltung mit sprunghaftem<br />
Übertragungsverhalten<br />
– Schwellwertschalter (Schmitt-Trigger, haben durch Mitkopplung Hysterese)<br />
– stabile Kippschaltung (durch Rückkopplung selbsthaltend)<br />
– monostabile Kippschaltung (fällt nach bestimmter Haltezeit wieder in den stabilen<br />
Gr<strong>und</strong>zustand zurück)<br />
– bistabile Kippschaltung (Flipflop)<br />
– astabile Kippschaltung (Multivibrator)<br />
• Bedeutsam für die<br />
Schaltungstechnik<br />
sind insbesondere<br />
die bistabilen<br />
Kippschaltungen<br />
ungetaktet<br />
z.B.: NOR-Basis-FF<br />
zustandsgesteuert<br />
z.B.:synchrone RS-FF<br />
Bistabile Kippglieder<br />
(Flipflop)<br />
taktgesteuert<br />
flankengesteuert<br />
(dynamisch)<br />
einflankengesteuert<br />
z.B.: D-FF<br />
zweiflankengesteuert<br />
z.B.: JK-MS-FF<br />
09.01.2003 Hartmut Gemmeke, WS2002/2003, Einführung in die Elektronik, Vorlesung 16 15<br />
Synchrone (getaktete) Flipflops<br />
1. Über C Taktzustandsgesteuerte Flipflops<br />
(transparente synchrone FF)<br />
– RS-Flipflop<br />
• C = 0 entspricht R=S=1 <strong>und</strong> damit<br />
Q = Q(t-1)<br />
• C = 1 entspricht asynchronem<br />
RS-Flipflop<br />
• Schaltsymbol in Abhängigkeitsnotation:<br />
– D-Flipflop oder D-Latch (Halteschaltung)<br />
• C = 1 Q = D, Q = D, für C = 1 wirkt<br />
Rückkopplung für D = 0 als invertiertes<br />
Signal als „Reset“ auf R´ des RS-Flipflops<br />
• C = 0 Q = D(t-1) Q = D(t-1)<br />
• Schaltsymbol in Abhängigkeitsnotation:<br />
09.01.2003 Hartmut Gemmeke, WS2002/2003, Einführung in die Elektronik, Vorlesung 16 16
Taktflankengesteuerte Flipflops<br />
• digitale Differenziation einer Flanke<br />
mit 3 Ingredienzien:<br />
1. Ungerade Zahl von Invertern, um<br />
verzögertes (um T‘-T) <strong>und</strong> invertiertes<br />
Signal zu erzeugen<br />
2. „UND“-Gatter, um Vorderflanke heraus<br />
zu differenzieren<br />
3. „NOR“-Gatter für die Rückflanke<br />
• Anwendung:<br />
– flankengetriggertes RS- oder D-<br />
Flipflop entspricht Zustandsflipflop mit<br />
T = Clock <strong>und</strong><br />
– Clock´ = A 1 Übernahme von R, S oder<br />
D mit steigender Flanke L → H oder<br />
– Clock´ = A 2 (verzögerte) Übernahme<br />
mit fallender Flanke H → L<br />
• Problem<br />
– Verzögerung ist abhängig von<br />
verwendeter Technologie<br />
T<br />
T<br />
T'<br />
A 1<br />
A 2<br />
1 1 1<br />
T'-T<br />
=> Master-Slave Flip-Flops<br />
T'<br />
&<br />
≥1<br />
A 1<br />
A 2<br />
t<br />
t<br />
t<br />
t<br />
09.01.2003 Hartmut Gemmeke, WS2002/2003, Einführung in die Elektronik, Vorlesung 16 17<br />
Flipflops mit Zwischenspeicherung<br />
a) Zwischenspeicherung des Eingangszustandes<br />
b) Eingang verriegeln<br />
c) Zwischenspeicher ausgeben<br />
⇒ Optimale Zeitauflösung für Definition der Flanke<br />
⇒ 2 Flipflops: Master- <strong>und</strong> Slave-Flipflop<br />
beim Übergang von C H⇒ L wird der Masterzustand eingefroren<br />
<strong>und</strong> der Slave (sowie Ausgang) folgt dem Master, RS-MS-FF:<br />
• Anwendung: Register oder D-Flipflop<br />
09.01.2003 Hartmut Gemmeke, WS2002/2003, Einführung in die Elektronik, Vorlesung 16 18
• JK-Flipflop = flankengesteuertes RS-Flipflop + Rückkopplung<br />
⇒ J=K=1 Toggle = automatischer Wechsel des Ausgangszustands mit jedem Takt<br />
C<br />
L/H<br />
J<br />
K<br />
0 0<br />
0 1<br />
1 0<br />
1 1<br />
0 0<br />
Q n 0<br />
0 Q n<br />
Q n Q n<br />
Q n+1<br />
Q n<br />
0<br />
1<br />
Q n<br />
• JK-Master-Slave Flipflops<br />
R<br />
– Entkopplung von Ein- <strong>und</strong> Ausgang<br />
– Zusätzlich:<br />
• Preset <strong>und</strong> Clear<br />
S<br />
JK-Flipflop<br />
bei positiver Taktflanke<br />
übernimmt der Master<br />
den Eingang<br />
bei negativer Taktflanke<br />
übernimmt der Slave<br />
den Master<br />
Anwendung: Zähler, Schieberegister („Toggle“-Funktion wird benötigt)<br />
09.01.2003 Hartmut Gemmeke, WS2002/2003, Einführung in die Elektronik, Vorlesung 16 19<br />
Allgemeine Multifunktionsflipflops<br />
Beispiel für Abhängigkeitsnotation<br />
• Flipflop mit folgenden Funktionen:<br />
– Halte altes Q<br />
– T = Toggle<br />
– L = Lade D<br />
D = Data<br />
C = Clock<br />
L<br />
0<br />
0<br />
1<br />
1<br />
T<br />
0<br />
1<br />
0<br />
1<br />
Q n+1<br />
Q n<br />
Q n<br />
D<br />
D<br />
• Bezeichnungen an Schaltsymbolen:<br />
– Dynamischer Eingang, reagiert auf 0 ⇒ 1<br />
– Dynamischer Eingang mit Negation, reagiert auf 1 ⇒ 0<br />
– Verzögerter Ausgang (solange wie Eingang auf 1 steht)<br />
09.01.2003 Hartmut Gemmeke, WS2002/2003, Einführung in die Elektronik, Vorlesung 16 20
Die wesentlichen Flipflop-Typen<br />
Übernimmt Information<br />
beim Taktübergang L/H.<br />
Gekennzeichnet durch ( )<br />
j=k=1 ⇒ toggle<br />
Ausgang mit 2 ter<br />
Flanke ( )<br />
09.01.2003 Hartmut Gemmeke, WS2002/2003, Einführung in die Elektronik, Vorlesung 16 21<br />
Komplexe Digitalschaltungen: asynchrone Dualzähler<br />
Kombination von kombinatorischen (Boolesche Logik) <strong>und</strong><br />
sequentiellen Schaltungskomponenten<br />
1. Zähler (gezählt werden die Pulse N)<br />
– Gr<strong>und</strong>element eines Zählers ist z.B. ein JK-Master-Slave Flipflop<br />
oder ein einflankengetriggertes D-Flipflop (Master-Slave)<br />
– Notwendig ist die Toggle Funktion J = K = 1 bzw. D-Flipflop mit D Q<br />
asynchrone Dualzähler:<br />
Vorwärtszähler:<br />
Slave ändert seinen<br />
Zustand bei<br />
negativer Flanke<br />
von N<br />
Rückwärtszähler:<br />
Slave ändert seinen<br />
Zustand bei<br />
positiver Flanke<br />
von N<br />
09.01.2003 Hartmut Gemmeke, WS2002/2003, Einführung in die Elektronik, Vorlesung 16 22
Synchrone Binärzähler<br />
1. Zählimpulse werden gleichzeitig auf alle Takteingänge der Zählerstufen<br />
gegeben ⇒ synchrones Umschalten der Kippstufen<br />
2. Kippstufe darf erst umschalten, wenn alle vorhergehenden Stufen auf „1“<br />
sind entspricht J = K = 1, sonst J = K = 0 entspricht keine Änderung<br />
Übertrag für die<br />
nächste Zählstufe<br />
– keine Verzögerung zwischen Takt <strong>und</strong> Zählresultat<br />
– Untersetzer = Frequenzteiler<br />
– 4-Bit-Zähler = 1:16 Umsetzer<br />
– Beliebiger Untersetzungsfaktor durch „UND-Gatter“<br />
der Q i verknüpft für ein CLR-Signal, z.B.: 1:10<br />
– Abhängig von der Stufe (Eingang oder Ausgang), auf<br />
die das Clear wirkt, ist CLR= Q 1 . Q 3 oder Q 0 . Q 3<br />
09.01.2003 Hartmut Gemmeke, WS2002/2003, Einführung in die Elektronik, Vorlesung 16 23<br />
Schieberegister (FIFO=first in first out)<br />
Bei jedem Taktimpuls wird die Information um eine Stelle weitergeschoben<br />
Parallele Auslese über Q A<br />
... Q D<br />
.<br />
JK-MS-Flipflop<br />
J = K entspricht Verhalten von<br />
einem D-Flipflop Q(t+1) = J<br />
(j,k)=(0,1) & Takt ↓ => Q=0<br />
(j,k)=(1,0) & Takt ↓ => Q=1<br />
• Seriell ⇒ Parallel-Wandlung<br />
– Schieberegister mit Parallel-Ausgang<br />
– Entspricht Ring Buffer<br />
• Parallel ⇒ Seriell-Wandlung<br />
– Schieberegister mit Parallel-Eingang<br />
09.01.2003 Hartmut Gemmeke, WS2002/2003, Einführung in die Elektronik, Vorlesung 16 24