Massbilder Auf der CD-ROM stehen die Massbilder im DXF-Format für den Import in beliebige CAD-Systeme zur Verfügung. Darstellung der Ansichten gemäss Projektionsmethode E (ISO) Alle Abmessungen in [mm]. Befestigungsgewinde in Kunststoff Schraubverbindungen bei Motoren mit Kunststoffflansch bedürfen einer speziellen Beachtung. M A Maximales Anzugsdrehmoment [Ncm] Auf diesen Wert darf ein Einschraubgerät (Elektroschrauber etc.) eingestellt werden. L Aktive Einschraubtiefe [mm] Das Verhältnis von Einschraubtiefe zu Gewindedurchmesser muss mindestens 2:1 betragen. Die Einschraubtiefe darf die nutzbare Gewindelänge nicht überschreiten! Zeile 5 Kennliniensteigung n/ M [min -1 mNm -1 ] Die Drehzahl - Drehmoment - Kennlinie gibt Auskunft über die Stärke des Motors. Je flacher die Kennlinie, desto weniger verändert sich die Drehzahl bei Lastschwankungen. Die Kennliniensteigung ist ein Rechenwert für 25°C Wicklungstemperatur. Zeile 6 Leerlaufstrom I o [mA] ist der Strom, der sich bei unbelastetem Motor einstellt. Er ist von der Bürstenreibung und der Reibung in den Lagern abhängig und ändert sich etwas mit der Drehzahl. Zeile 7 Anlaufstrom I A [mA], [A] ist der Quotient aus Nennspannung (Klemmenspannung) und Anschlusswiderstand des Motors. Er ist dem Anhaltemoment äquivalent. Zeile 12 Maximale Abgabeleistung P max [mW], [W] ist die rechnerische Maximalleistung bei Nennspannung und 25°C Rotortemperatur. Die zulässigen Grenzwerte liegen oft darunter (siehe max. Dauerbelastungsstrom und Grenzdrehzahl). Zeile 13 Maximaler Wirkungsgrad max[%] Er bestimmt sich aus dem Verhältnis von Leerlaufund Anlaufstrom. Je höher er ist, desto näher liegt er bei den Leerlaufdaten. Im allgemeinen liegt er bei etwa 1/7 des Anhaltemomentes. Nicht immer kennzeichnet er auch den optimalen Arbeitspunkt. Zeile 14 Drehmomentkonstante k M [mNm A -1 ] oder auch spezifisches Drehmoment, ist der Quotient aus erzeugtem Drehmoment und dem dazugehörenden Strom. Zeile 15 Drehzahlkonstante k n [min -1 V -1 ] zeigt die spezifische Drehzahl pro 1 Volt angelegter Spannung. Reibungsverluste nicht berücksichtigt. Der reziproke Wert der Drehzahlkonstante wird Spannungs- oder Back-EMF-Konstante genannt. Zeile 8 Anschlusswiderstand R[ ] Motordaten: ist der Widerstand, der bei 25°C an den Anschlussklemmen gemessen wird. Er bestimmt bei gegebener Spannung den Anlaufstrom. Bei Graphitbürs- m [ms] Zeile 16 Mechanische Anlaufzeitkonstante Zeile 1 Typenleistung P 2T [W] ist die im empfohlenen Leistungsbereich maximale ten ist zu beachten, dass sich der Übergangswiderstand belastungsabhängig verändert. auf 63% seiner Leerlaufdrehzahl zu kommen. ist die Zeit, die der Rotor benötigt, um vom Stillstand Abgabeleistung. Sie ist typenabhängig und entspricht der Darstellung im Selection Guide (siehe Zeile 17 Rotorträgheitsmoment J R [gcm 2 ] auch Seite 50 bis 148 unter Betriebsbereiche). ist das polare Massenträgheitsmoment des Rotors. Zeile 2 Nennspannung U [Volt] Zeile 9 Grenzdrehzahl n max [min -1 ] ist diejenige Spannung, auf die sich alle Nenndaten Die Grenzdrehzahl sollte im Normalbetrieb nicht Zeile 18 Anschlussinduktivität L [mH] beziehen (Zeile 3, 4, 6, 7, 12, 13). Sie ist so gewählt, überschritten werden. Bei höheren Drehzahlen ist ist die Induktivität der Wicklung, an den Anschlussklemmen gemessen dass im Leerlauf die Grenzdrehzahl nicht überschritten wird. Die Motoranwendung ist aber nicht vorzeitigen Ausfall des Motors führen können. (bei 1 kHz, sinus). mit Kommutierungsproblemen zu rechnen, die zum auf diese Spannung beschränkt. Um die Typenleistung (Zeile 1) zu erreichen, sind im Betriebspunkt Zeile 19 Thermischer Widerstand R th2 [K W -1 ] höhere Spannungen zulässig. Entsprechend steigt von Gehäuse zu umgebender Luft. Charakteristischer Wert des thermischen Übergangswiderstan- Zeile 10 Maximaler Dauerbelastungsstrom auch die maximale Abgabeleistung (Zeile 12) an. I zul. [mA],[A] des ohne zusätzliche Wärmeableitung. Zeile 19 Zeile 3 Leerlaufdrehzahl n o [min -1 ] ist der Strom, der bei einer Umgebungstemperatur und 20 addiert, bestimmen die max. zul. Verlustleistung. ist die Drehzahl, die sich bei unbelastetem Motor von 25°C die Wicklung bis zur maximal zulässigen unter Betrieb mit Nennspannung einstellt. Sie ist Temperatur erwärmt. Zeile 20 Thermischer Widerstand R praktisch proportional zur angelegten Spannung. th1 [K W -1 ] von Rotor zu Gehäuse. Zeile 4 Anhaltemoment M H [mNm] ist das Lastmoment, das bei Nennspannung einen Zeile 11 Dauerdrehmoment M zul [mNm] Stillstand der Welle bewirkt. Die hierbei rasch ansteigende Motortemperatur führt zu einer entsprechen- abgegeben werden kann und dabei die Wicklung lung th1 [s] ist das Drehmoment, das dauernd oder im Mittel Zeile 21 Thermische Zeitkonstante Wickden Abnahme des Anhaltemomentes (siehe auch unter «Technik – kurz und bündig» – Temperatur). bis zur maximal zulässigen Temperatur erwärmt. Basis ist eine Umgebungstemperatur von 25°C. ist die Zeit, die die Wicklung benötigt, um 63% der Endtemperatur zu erreichen. maxon DC motor Betriebsbereiche Legende Beispiel von Seite 113 n [min -1 ] 1000 9000 7000 5000 3000 1000 5 10 15 20 0.1 0.2 0.3 0.4 1 2 3 5 Watt M [mNm] I [A] I [A] Empfohlener Leistungsbereich Dauerbetriebsbereich unter Berücksichtigung der angegebenen thermischen Widerstände (Ziffer 19 und 20) und einer Umgebungstemperatur von 25°C wird bei dauernder Belastung die maximal zulässige Rotortemperatur erreicht. = thermische Grenze Kurzzeitbetrieb Der Motor darf kurzzeitig und wiederkehrend überlastet werden. 110128 Motor mit hochohmiger Wicklung (Zeile 8) 110117 Motor mit niederohmiger Wicklung (Zeile 8) Kurzzeitbetrieb Drehzahl (n), Drehmoment (M), Strom (l): Die Eckpunkte davon stellen Grenzwerte für den Dauer- und Kurzzeitbetrieb dar. Die in den Tabellen aufgeführten Motordaten (Zeile 3, 4, 6, 7, 12, 13) beziehen sich auf die Nennspannung (Zeile 2), sind also keine Grenzwerte. Diese werden bei höheren Spannungen erreicht. 110128 Typenleistung P 2T (W) (Zeile 1) Anlaufstrom I A bei Nennspannung (Zeile 7) sowie zugehöriges Anhaltemoment M H (mNm) (Zeile 4) I A = U R 103 (mA) Wicklungsnummer mit zugehörigem Stromniveau bei entsprechendem Drehmoment. ON Motor in Betrieb OFF Motor steht still Î max. Spitzenstrom I zul. max. Dauerbelastungsstrom (Zeile 10) t ON Einschaltzeit [s] T Zykluszeit t ON +t OFF [s] ED Einschaltdauer in Prozenten der Zykluszeit. Der Motor darf während X% der gesamten Zykluszeit T um das Verhältnis Î/I zul überlastet werden. Ausgabe April 2001 / Änderungen vorbehalten maxon DC motor 49
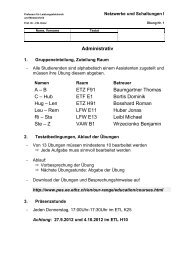
DC-Kleinstmotoren Edelmetallkommutierung Serie 1 2 3 4 1331 ... SR Nennspannung Anschlusswiderstand Abgabeleistung Wirkungsgrad 3,2 mNm Kombinierbar mit Getriebe: 14/1, 15/3, 15/5 Impulsgeber: IE2 1331 T 006 SR 012 SR 024 SR U N R 6 2,83 12 13,7 24 52,9 P 2 max. 3,11 2,57 2,66 η max. 81 80 80 Volt Ω W % 5 6 7 8 Leerlaufdrehzahl Leerlaufstrom (bei Wellen ø 1,5 mm) Anhaltemoment Reibungsdrehmoment n o I o M H M R 10 600 9 900 10 400 0,0220 0,0105 0,0055 11,20 9,90 9,76 0,12 0,12 0,12 rpm A mNm mNm 9 10 11 12 Drehzahlkonstante Generator-Spannungskonstante Drehmomentkonstante Stromkonstante k n k E k M k I 1 790 835 439 0,56 1,20 2,28 5,35 11,4 21,8 0,187 0,087 0,046 rpm/V mV/rpm mNm/A A/mNm 13 14 15 16 17 Steigung der n-M-Kennlinie Anschlussinduktivität Mechanische Anlaufzeitkonstante Rotorträgheitsmoment Winkelbeschleunigung ∆n/∆M L τ m J α max. 946 1 000 1 070 70 310 1 100 7 7 7 0,71 0,67 0,63 160 150 160 rpm/mNm µH ms gcm 2 . 10 3 rad/s 2 18 19 20 Wärmewiderstände Thermische Zeitkonstante Betriebstemperaturbereich: – Motor – Rotor, max. zulässig Rth 1 / Rth 2 τ w1 / τ w2 6 / 25 5 / 190 – 30 ... + 85 +125 (Sonderausführung – 55 … + 125) K/W s °C °C 21 22 23 Wellenlagerung Wellenbelastung, max. zulässig: – für Wellendurchmesser – radial bei 3000 rpm (3 mm vom Lager) – axial bei 3000 rpm – axial im Stillstand Wellenspiel: – radial – axial ≤ ≤ Sinterlager (standard) 1,5 1,2 0,2 20 0,03 0,2 mm N N N mm mm 24 25 26 Gehäusematerial Gewicht Drehrichtung Stahl, schwarz beschichtet 19 rechtsdrehend auf Abtriebswelle gesehen g Empfohlene Werte 27 Drehzahl bis 28 Dauerdrehmoment bis 29 Thermisch zulässiger Dauerstrom ne max. Me max. Ie max. 12 000 12 000 12 000 3,2 3,2 3,2 0,81 0,37 0,19 rpm mNm A 0 0 ø13 -0,052 ø6 -0,05 A ø3,5 ø1,5 -0,004 -0,009 ø0,05 A 0,02 ø2,38 -0,015 0 ø0,07 A 0,04 DIN 58400 m=0,2 z=9 x=+0,35 10,6 1 31,2 1 2,1 6 ±0,3 8,1 ±0,3 1,1 2,1 4,3 ±0,3 2 3,9 1331 T ... SR Angaben zu Gewährleistung und Lebensdauer sowie weitere technische Erläuterungen siehe „Technische Informationen”. 1331 E ... SR für Getriebe 15/... Sonderausführungen für DC-Kleinstmotoren sind auf Seite 62 ersichtlich. Änderungen vorbehalten. 41 www.faulhaber.com