SPI-Bus-Kommunikation mit HCE-Sensor - Sensortechnics
SPI-Bus-Kommunikation mit HCE-Sensor - Sensortechnics
SPI-Bus-Kommunikation mit HCE-Sensor - Sensortechnics

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
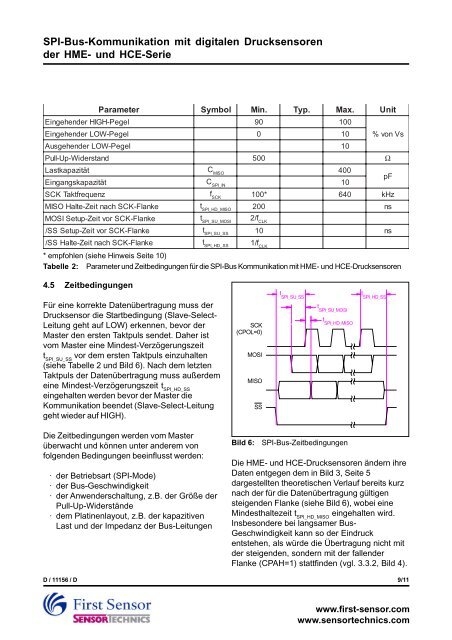
<strong>SPI</strong>-<strong>Bus</strong>-<strong>Kommunikation</strong> <strong>mit</strong> digitalen Drucksensorender HME- und <strong>HCE</strong>-SerieParameterS ymbolM in.T yp.Max.EingehenderHIGH-Pegel90100EingehenderLOW-Pegel0 10AusgehenderLOW-Pegel10Unit% von VsPull-Up-Widerstand500ΩLastkapazitätC MISO400EingangskapazitätC <strong>SPI</strong>_IN10pFSCK TaktfrequenzfS CK100*640kHzMISO Halte-Zeit nach SCK-Flanket<strong>SPI</strong>_HD_MISO200nsMOSISetup-Zeit vor SCK-Flanket 2/f<strong>SPI</strong>_SU_MOSICLK/ SS Setup-Zeit vor SCK-Flanket<strong>SPI</strong>_SU_SS10ns/ SS Halte-Zeit nach SCK-Flanket<strong>SPI</strong>_HD_SS1/fCLK* empfohlen (siehe Hinweis Seite 10)Tabelle 2: Parameter und Zeitbedingungen für die <strong>SPI</strong>-<strong>Bus</strong> <strong>Kommunikation</strong> <strong>mit</strong> HME- und <strong>HCE</strong>-Drucksensoren4.5 ZeitbedingungenFür eine korrekte Datenübertragung muss derDrucksensor die Startbedingung (Slave-Select-Leitung geht auf LOW) erkennen, bevor derMaster den ersten Taktpuls sendet. Daher istvom Master eine Mindest-Verzögerungszeitt <strong>SPI</strong>_SU_SSvor dem ersten Taktpuls einzuhalten(siehe Tabelle 2 und Bild 6). Nach dem letztenTaktpuls der Datenübertragung muss außerdemeine Mindest-Verzögerungszeit t <strong>SPI</strong>_HD_SSeingehalten werden bevor der Master die<strong>Kommunikation</strong> beendet (Slave-Select-Leitunggeht wieder auf HIGH).SCK(CPOL=0)MOSIMISOSSt<strong>SPI</strong>_SU_SSt<strong>SPI</strong>_SU_MOSIt<strong>SPI</strong>_HD_MISOt<strong>SPI</strong>_HD_SSDie Zeitbedingungen werden vom Masterüberwacht und können unter anderem vonfolgenden Bedingungen beeinflusst werden:· der Betriebsart (<strong>SPI</strong>-Mode)· der <strong>Bus</strong>-Geschwindigkeit· der Anwenderschaltung, z.B. der Größe derPull-Up-Widerstände· dem Platinenlayout, z.B. der kapazitivenLast und der Impedanz der <strong>Bus</strong>-LeitungenD / 11156 / DBild 6:<strong>SPI</strong>-<strong>Bus</strong>-ZeitbedingungenDie HME- und <strong>HCE</strong>-Drucksensoren ändern ihreDaten entgegen dem in Bild 3, Seite 5dargestellten theoretischen Verlauf bereits kurznach der für die Datenübertragung gültigensteigenden Flanke (siehe Bild 6), wobei eineMindesthaltezeit t <strong>SPI</strong>_HD_MISOeingehalten wird.Insbesondere bei langsamer <strong>Bus</strong>-Geschwindigkeit kann so der Eindruckentstehen, als würde die Übertragung nicht <strong>mit</strong>der steigenden, sondern <strong>mit</strong> der fallenderFlanke (CPAH=1) stattfinden (vgl. 3.3.2, Bild 4).9/11www.first-sensor.comwww.sensortechnics.com