Surface algorithms using bounds on derivatives
Surface algorithms using bounds on derivatives
Surface algorithms using bounds on derivatives

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
Computer Aided Geometric Design 3 (1986) 295-311 295<br />
North-Holland<br />
<str<strong>on</strong>g>Surface</str<strong>on</strong>g> <str<strong>on</strong>g>algorithms</str<strong>on</strong>g> <str<strong>on</strong>g>using</str<strong>on</strong>g> <str<strong>on</strong>g>bounds</str<strong>on</strong>g><br />
<strong>on</strong> <strong>derivatives</strong><br />
Daniel FILIP, Robert MAGEDSON, and Robert MARKOT<br />
Automati<strong>on</strong> Technology Products, 1671 Dell Aoenue, Campbell, CA 95008, U.S.A.<br />
Received 20 September 1986<br />
Revised 25 February 1987<br />
Abstract. This paper generalizes three very important <str<strong>on</strong>g>algorithms</str<strong>on</strong>g> for surfaces which previously <strong>on</strong>ly worked well<br />
with polynomials. The <str<strong>on</strong>g>algorithms</str<strong>on</strong>g> are calculati<strong>on</strong> of piecewise linear approximati<strong>on</strong>s, min-max boxes, and<br />
surface/surface intersecti<strong>on</strong>s. The class of surfaces that can be handled are all parametric C 2 surfaces. All the<br />
<str<strong>on</strong>g>algorithms</str<strong>on</strong>g> are related by theorems from approximati<strong>on</strong> theory which give informati<strong>on</strong> about the maximum<br />
deviati<strong>on</strong> an approximati<strong>on</strong> to a surface can have if <str<strong>on</strong>g>bounds</str<strong>on</strong>g> <strong>on</strong> partial <strong>derivatives</strong> are known. We generalize<br />
these theorems to work with parametric geometry, and we also show how to obtain the necessary <str<strong>on</strong>g>bounds</str<strong>on</strong>g>.<br />
Keywords. Approximati<strong>on</strong> theory, surface <str<strong>on</strong>g>algorithms</str<strong>on</strong>g>.<br />
1. Introducti<strong>on</strong><br />
Computer Aided Geometric Design (CAGD) is c<strong>on</strong>cerned with <str<strong>on</strong>g>algorithms</str<strong>on</strong>g> to manipulate<br />
parametric curves and surfaces. Unfortunately, many of the well known <str<strong>on</strong>g>algorithms</str<strong>on</strong>g> can <strong>on</strong>ly<br />
work with particular kinds of geometry such as B-splines. In this paper we present <str<strong>on</strong>g>algorithms</str<strong>on</strong>g><br />
for curves and surfaces which <strong>on</strong>ly depend <strong>on</strong> knowing upper <str<strong>on</strong>g>bounds</str<strong>on</strong>g> <strong>on</strong> the <strong>derivatives</strong> of<br />
order two. The <str<strong>on</strong>g>algorithms</str<strong>on</strong>g> described are for piecewise linear approximati<strong>on</strong>, bounding box<br />
determinati<strong>on</strong>, and recursive subdivisi<strong>on</strong> for intersecti<strong>on</strong> problems. All three of these processes<br />
must be d<strong>on</strong>e in almost any surface or solid modeller. For simplicity, the surfaces are assumed<br />
to have a rectangular parameter space, although the <str<strong>on</strong>g>algorithms</str<strong>on</strong>g> can easily be extended to work<br />
with other domains. The <str<strong>on</strong>g>algorithms</str<strong>on</strong>g> are based <strong>on</strong> results from approximati<strong>on</strong> theory, and we<br />
derive some new theorems especially for parametric geometry.<br />
Lane and Carpenter [Lane et al. '79] first used <str<strong>on</strong>g>bounds</str<strong>on</strong>g> <strong>on</strong> <strong>derivatives</strong> for display of<br />
parametric surfaces. However the result from approximati<strong>on</strong> theory that they used [Prenter '75]<br />
is crude and much better results are possible, as we show later. Wang [Wang '84] also used<br />
<str<strong>on</strong>g>bounds</str<strong>on</strong>g> <strong>on</strong> <strong>derivatives</strong> for curve/curve and surface/surface intersecti<strong>on</strong>s. But Wang's result has<br />
problems for technical reas<strong>on</strong>s we discuss later. Koparkar and Mudur [Koparkar et al. '84]<br />
present a set of <str<strong>on</strong>g>algorithms</str<strong>on</strong>g> not unlike ours although their <str<strong>on</strong>g>algorithms</str<strong>on</strong>g> require knowing the zeros<br />
of <strong>derivatives</strong> which, in general, are much harder to find than upper <str<strong>on</strong>g>bounds</str<strong>on</strong>g>. Even for simple<br />
tensor product polynomials, their method involves solving simultaneous n<strong>on</strong>linear equati<strong>on</strong>s.<br />
Their method is also not rigid moti<strong>on</strong> invariant which means that when the surface is moved,<br />
the zeros must be recalculated. The <str<strong>on</strong>g>bounds</str<strong>on</strong>g> we use fortunately are rigid moti<strong>on</strong> invariant and<br />
are also easily adjusted when the surface is affinely transformed. Another algorithm was<br />
developed at McD<strong>on</strong>nell Douglas [Hought<strong>on</strong> et al. '85] to find the intersecti<strong>on</strong> between<br />
arbitrary C 1 surfaces, and is also very similar to the <strong>on</strong>e presented here. However, because no<br />
sec<strong>on</strong>d derivative informati<strong>on</strong> is used, the McD<strong>on</strong>nell Douglas algorithm has a few ad hoc<br />
parameters such as a bounding box expansi<strong>on</strong> factor to try to make a box fit around a surface<br />
0167-8396/86/$3.50 © 1986, Elsevier Science Publishers B.V. (North-Holland)
296 D. Filip et aL / <str<strong>on</strong>g>Surface</str<strong>on</strong>g> <str<strong>on</strong>g>algorithms</str<strong>on</strong>g><br />
and a surface normal ratio factor to try to determine surface flatness. The theory in this paper<br />
describes how to determine these factors very precisely.<br />
In Secti<strong>on</strong> 2 we develop the general theory needed, in Secti<strong>on</strong> 3, we give applicati<strong>on</strong>s of the<br />
general theory, and in Secti<strong>on</strong> 4 we show how to compute the upper <str<strong>on</strong>g>bounds</str<strong>on</strong>g> needed for the<br />
<str<strong>on</strong>g>algorithms</str<strong>on</strong>g>. Secti<strong>on</strong> 5 derives another theorem to improve the <str<strong>on</strong>g>algorithms</str<strong>on</strong>g> in certain cases.<br />
2. General theory<br />
In this secti<strong>on</strong> we present some new and old approximati<strong>on</strong> theoretic results for curves and<br />
surfaces.<br />
2.1. Approximating curves<br />
Wang used the following result for linearly approximating curves, which is proved in [de<br />
Boor '78, p. 39]:<br />
Theorem 1. Let f:[a, b]~ R be any C 2 functi<strong>on</strong> and let l(x)<br />
l(a) =f(a) and l(b)=f(b). Then<br />
sup If(x)-l(x)l
Which implies<br />
D. Filip et al. / <str<strong>on</strong>g>Surface</str<strong>on</strong>g> <str<strong>on</strong>g>algorithms</str<strong>on</strong>g> 297<br />
lie(to) 112~ < lie(to)II IlftS(a-x)l'(x) dxll,<br />
and since I[ e(to)II > 0 (if not we're d<strong>on</strong>e):<br />
lie(t0) [I ~ [[ft~( a- x).f'(x) dxl[<br />
~< sup II/"(x) II II fa( a -- x) dx II<br />
a
298 D. Filip et aL / <str<strong>on</strong>g>Surface</str<strong>on</strong>g> <str<strong>on</strong>g>algorithms</str<strong>on</strong>g><br />
(a)<br />
B<br />
R 2<br />
A C A ~11<br />
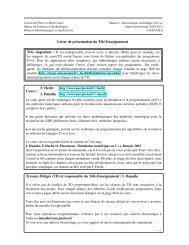
Fig. 1. (a) The four regi<strong>on</strong>s of parameter triangle T used in the proof of Theorem 4, and (b) the regi<strong>on</strong> R 1 enlarged.<br />
where<br />
= 0 2i( u, o)l<br />
M1 (u,v)ETSUp an 2 ] ,<br />
sup I°V(u'°),<br />
(u,o)~T OUOO<br />
343= sup<br />
L<br />
O2f(u' v). I<br />
(u,v)~T 0V2 l"<br />
Proof. Let e(u, v)=f(u, v)-l(u, v) and s(u, v)=e(u, v).e(u, v). Since T is compact,<br />
s(u, v) attains its maximum at some point P0 ~ T. If P0 lies <strong>on</strong> the boundary, then we can just<br />
apply Theorem 2 (taking special care if P0 is <strong>on</strong> the hypotenuse of T). So suppose P0 is in the<br />
interior of T. Then (3s/Ou)(po) = 0 = (3s/Ov)(po), which implies e(po) . (Oe/Ou)(Po) = 0 =<br />
e(po). (3e/Ov)(po). Also suppose Po ~ R1, as shown in Fig. 1, the other cases being proved<br />
similarly. Let v=A-Po and write v=(d cos 0, d sin 0) where d= IIA -P0 II and 0 is the<br />
angle between A C and v. The proof now follows similarly to that given for Theorem 2 by<br />
looking at the curve g(t) from Po to A <strong>on</strong> e(u, v). Let g(t) = e(Po + tv), so g(0) = e(Po) and<br />
g(1) = e(A). Writing g(t) in its Taylor series yields:<br />
which implies<br />
,(t) =,(0) + g'(0)t +<br />
g(a) = g(0) + g'(0) +<br />
and expanding out gives<br />
where<br />
e(A) = e(Po) + ( Oe(po)<br />
Ou<br />
1( 02! (<br />
I = fo --'--~ Ou<br />
fotg"(f)(1 ~) d~,<br />
fo'g"(f)(1 f) d~,<br />
d cos 0 + )(Oe'P°-----------" d sin OI ~ + I<br />
0v /<br />
02I<br />
Po + ~v) d2 c°s20 + 2 3--~v (Po + t;v) d2 sin 0 cos 0<br />
+ Ov 202Izkpo + ~v)d 2 sin20)(1 -- ~) d~.<br />
Taking the dot product of the last expressi<strong>on</strong> with e(po), and noting the following equalities:<br />
e(Po) . (8e/au)(po) = 0 = e(Po) . (3e/3v)(po) and e( A) = 0, yields:<br />
O=e(Po) .e(po) + e(Po). I,
which implies<br />
II e(p0)II2< lie(p0)II II I II,<br />
and since II e(po)II > 0 (if not, we're d<strong>on</strong>e), we get<br />
II e(po) II < It 1 II<br />
D. Filip et al. / <str<strong>on</strong>g>Surface</str<strong>on</strong>g> <str<strong>on</strong>g>algorithms</str<strong>on</strong>g> 299<br />
(d 2 c0s2~ M l -4- 2d 2 sin 0 cos 8 M2 + d 2 sin28) I f01(1 - 4) d~]<br />
= ½(d 2 cos28 M 1 + 2d 2 sin 8 cos 8 ME + d 2 sin28).<br />
Now observing Fig. l(b), notice that d cos 8 < ½l 1 and d sin 8 ~< ½12. Therefore<br />
1 2<br />
II e(p0)II < ½(112M1 + 2~1112M2 + z12M3)<br />
= (l?M1 + 21112M2 + []<br />
Barnhill and Gregory [BarnhiU et al. '72] proved a similar theorem for scalar-valued<br />
functi<strong>on</strong>s with more general norms. However, their proof is not easily extended to vector-val-<br />
ued functi<strong>on</strong>s because of its complexity. It is actually possible to extend Theorem 4 to more<br />
general norms, but we elected not to do so for simplicity and also because these norms are<br />
rarely used in CAGD.<br />
It is not difficult to adjust the <str<strong>on</strong>g>bounds</str<strong>on</strong>g> 3/1, M2, and M 3 when f is affinely transformed to a<br />
surface g, where<br />
In this case<br />
g(u, v) = Mf(u, v) + T.<br />
auaav ~v) < II auaav~V) I,<br />
~a+bg(u,<br />
a--.~-.-.a~vt "<br />
V)<br />
. = I[ M aa + bI ( u'<br />
MII aa+bf(u'<br />
where II M II is the norm of the matrix M and is equal to the largest eigenvalue of this 3 × 3<br />
matrix. If the affine transformati<strong>on</strong> is a rigid body moti<strong>on</strong>, then II M I1 equals <strong>on</strong>e and so no<br />
change to the original <str<strong>on</strong>g>bounds</str<strong>on</strong>g> is needed.<br />
We now discuss <strong>on</strong>e more theorem due to Wang [Wang '84] which is directly applied to<br />
rectangular surfaces, and does not require the patches to be split up into triangles.<br />
Theorem 5. Let R c R 2 be the rectangular regi<strong>on</strong> with vertices (A, B, C, D ) of the form<br />
B = A + (l 1, 0), C = A + (0, 12), and D = A + (11, 12). Let Jr: R ~ R 3 be any C 2 functi<strong>on</strong>, and<br />
let l(u, v) be the linearly parametrized quadrilateral with l(A)=I(A)- A, l(B)=Jr(B)+ zl,<br />
t(C) =Jr(C) +A, and l(D) =Jr(D) -A, where A = ¼(f(A) -Jr(B) -Jr(C) +Jr(D)). (lt is not<br />
hard to show that l(u, v) is planar.) Then<br />
where<br />
sup II Jr(u, v) -t(u, v)II < ---ff- V~ (l?M 1 + 2I, I:M~ + I~M3),<br />
(u,v)~R<br />
( a2x2 a2x3 t<br />
M 1=max 3u 2 , 3u 2 , ~ ],<br />
[I 02xl ], a2x2<br />
M2=max~la--~v [ I,[ a2x3 1<br />
OuOv 1'<br />
1<br />
M3=max av 2 , av 2 ' av 2 ]
300 D. Filip et al. / <str<strong>on</strong>g>Surface</str<strong>on</strong>g> <str<strong>on</strong>g>algorithms</str<strong>on</strong>g><br />
Unfortunately, Wang's theorem has the following problem. Suppose f(u, v) and g(u, v) are<br />
two adjacent surface patches with their respective linear approximates ly and Ig given in<br />
Theorem 5, and suppose [1 f- If I[ and [[ g - i s [I are within some specified tolerance c. Then<br />
although f and g are at least C o across their comm<strong>on</strong> boundary, l! and lg will in general be<br />
completely disjoint. If ! I and I s are replaced by some other linear approximates ! S and l~<br />
which share a comm<strong>on</strong> boundary curve, then there is no guarantee that I[ f-IS [[ and<br />
I[ g- ! s [[ are also within e. Since C O c<strong>on</strong>tinuity of the piecewise linear approximati<strong>on</strong> is<br />
required for almost any algorithm that uses an approximati<strong>on</strong> to a C O surface, we have no<br />
practical use for Theorem 5.<br />
3. Applicati<strong>on</strong>s<br />
In this secti<strong>on</strong> we present three <str<strong>on</strong>g>algorithms</str<strong>on</strong>g> for surfaces which are based <strong>on</strong> Theorem 4. Each<br />
algorithm can be easily modified to work with curves.<br />
3.1. Piecewise linear approximati<strong>on</strong><br />
The problem here is given a C 2 surface f: [0, 1] × [0, 1] ~ R 3 and an arbitrary tolerance c,<br />
find a piecewise linear surface l: [0, 1] × [0, 1] ~ R 3 so that sup II l(u, v) - l(u, v)II < c. This<br />
approximati<strong>on</strong> is important for applicati<strong>on</strong>s where the original surface definiti<strong>on</strong> is difficult to<br />
work with such as in display of the surface and calculati<strong>on</strong> of its mass properties. It is<br />
important that the bound <strong>on</strong> the error in the approximati<strong>on</strong> is known so that any analysis d<strong>on</strong>e<br />
<strong>on</strong> the approximati<strong>on</strong> can take this into c<strong>on</strong>siderati<strong>on</strong>. The traditi<strong>on</strong>al way this problem is<br />
solved for polynomial and rati<strong>on</strong>al polynomial surfaces is by means of recursive subdivisi<strong>on</strong> of<br />
the B-spline or B6zier form and flatness testing [Lane et al. '80; Filip '86]. These schemes have<br />
the advantage over the algorithm to be presented in that the approximating pieces can be<br />
placed adaptively over the surface, that is, more pieces can be placed in areas of greater<br />
curvature, which minimizes the total number of pieces. However, our algorithm runs several<br />
times faster than the adaptive <str<strong>on</strong>g>algorithms</str<strong>on</strong>g> and is being used successfully at ATP. In additi<strong>on</strong>,<br />
the number of additi<strong>on</strong>al pieces used by this algorithm is not much more than necessary since<br />
the surfaces first can be split into its patches, each piece of which usually has the same measure<br />
of curvature. Each patch can then be approximated independently. The algorithm works by<br />
determining the numbers n and m so that after evaluating at the (n + 1)(m + 1) grid of points<br />
{( ) (1)(2 O) ( ) (__1) (1 1)(2 __1) ..,(1,1)}, (3.1)<br />
0,0, ,0 , , ,..., 1,0, 0, m . . . . m '"<br />
and forming the 2nm triangles from the points, we have our desired approximati<strong>on</strong>. More<br />
simply stated, we want to determine the step sizes 1/n and 1/m in the u and v directi<strong>on</strong>s for<br />
evaluati<strong>on</strong>. With polynomial and rati<strong>on</strong>al polynomial surfaces, the most comm<strong>on</strong> forms of<br />
surfaces in CAGD, these evaluati<strong>on</strong>s can be d<strong>on</strong>e very rapidly <str<strong>on</strong>g>using</str<strong>on</strong>g> forward differencing.<br />
Let l 1, l 2, M 1, M 2, and M 3 be as in Theorem 4. Also let l I = 1/n and let l 2 = 1/m. Then,<br />
from Theorem 4 we desire<br />
-8 MI+ nm 2+ M 3 =c. (3.2)<br />
We say that the u directi<strong>on</strong> is 'flat' if M 1 = O, i.e., the u directi<strong>on</strong> is linear. Likewise, we say the<br />
v directi<strong>on</strong> is 'fiat' if M 3 = O. If the u directi<strong>on</strong> is flat and the v directi<strong>on</strong> is not, then n is<br />
automatically set to <strong>on</strong>e. Similarly, if the v directi<strong>on</strong> is flat and the u directi<strong>on</strong> is not, then m is<br />
automatically set to <strong>on</strong>e. If both directi<strong>on</strong>s are flat, then n and m are set to be the same.
D. Filip et al. / <str<strong>on</strong>g>Surface</str<strong>on</strong>g> <str<strong>on</strong>g>algorithms</str<strong>on</strong>g> 301<br />
Otherwise, the algorithm proporti<strong>on</strong>ally rolls in the mixed partial term M 2 into the number of<br />
steps in u and the number of steps in v based <strong>on</strong> the ratio M1/M 3. Thus we have four cases:<br />
Case 1: M 1 > 0 and M 3 > 0. Let k = 3/11/3/13, and set n/m = k, which means n = km. Then<br />
from equati<strong>on</strong> (3.2) we have<br />
1 ( 1 M+ ~2 M + -l---2-M3/m]<br />
Solving for m we obtain<br />
Case 2:<br />
Solving for n we obtain<br />
Case 3:<br />
Case 4:<br />
km 2 2<br />
m = -~e ( M 1 + 2kM 2 + k2M3 ).<br />
.-~-(..<br />
M 1 > 0 and M 3 = 0. Let m = 1. Then from equati<strong>on</strong> (3.2) we have<br />
1 M<br />
M 1 = 0 and M 3 > 0. This is the same as Case 2 with the roles of n and m switched.<br />
M1 = 0 = M 3. This case is the same Case 1 with k = 1, i.e.<br />
n~--m= V/1 ~ ( M1+ 2 M2 + M3 )<br />
Crack Preventi<strong>on</strong>. Usually an object c<strong>on</strong>sists of many surfaces and if the object is c<strong>on</strong>tinuous,<br />
then the piecewise linear approximati<strong>on</strong> to the entire object is usually expected to be<br />
c<strong>on</strong>tinuous. However, if the above algorithm is applied to two different adjacent surfaces<br />
independently, then cracks can appear between the linear approximati<strong>on</strong>s to adjacent surfaces<br />
[Filip '86]. This is caused by adjacent surfaces being subdivided to different depths. One simple<br />
way to eliminate this problem is to subdivide all the surfaces to the same depth as the patch<br />
that needs the most subdivisi<strong>on</strong>. The problem with this soluti<strong>on</strong> is that it will generate an<br />
unduly large number of approximating pieces if just <strong>on</strong>e of the surfaces is highly curved.<br />
A much better soluti<strong>on</strong> to this problem is the following. First piecewise linearly approximate<br />
each boundary curve to the accuracy of c by applying the piecewise linear approximating<br />
scheme to the curve case. Then when evaluating the grid of points in set (3.1), if a point lies <strong>on</strong><br />
the boundary of the surface, move it to the closest point <strong>on</strong> the approximati<strong>on</strong> to the boundary.<br />
Since two adjacent surfaces share a comm<strong>on</strong> boundary curve, the approximati<strong>on</strong> to that curve<br />
will be the same from both patches. So because boundary points are moved to that approxima-<br />
ti<strong>on</strong>, no cracks will occur. One should notice that polyg<strong>on</strong>s from the approximati<strong>on</strong> al<strong>on</strong>g the<br />
boundary may have more than three sides and may be n<strong>on</strong>-planar (Fig. 2). These boundary<br />
polyg<strong>on</strong>s can easily be triangulated if required. It is very important to note, however, that the<br />
resulting approximati<strong>on</strong> may not be within c in the neighborhood of the boundary curves. One<br />
way to get around this problem is to approximate the boundary curves and the surfaces to a<br />
tolerance of c/2. Empirically, though, we have found that <str<strong>on</strong>g>using</str<strong>on</strong>g> this tighter tolerance is usually<br />
unnecessary, and subdividing everthing to tolerance of just E seems to work fine in practice.<br />
3.2. Min-max bounding box<br />
The bounding box of a surface f(u, v) is defined by two points (P0, Pl), where P0 =<br />
(x~, Ymi~, Zmin) and Pl = (Xm~x, Ym~x, Zm~), SO that any point (x, y, z) <strong>on</strong> the surface<br />
B ~<br />
~r~nlm ~Dot ~rdtuat~ ea Ir~m~
302 D. Filip et al. / <str<strong>on</strong>g>Surface</str<strong>on</strong>g> <str<strong>on</strong>g>algorithms</str<strong>on</strong>g><br />
satisfies<br />
Xmi n ~
D. Filip et al. / <str<strong>on</strong>g>Surface</str<strong>on</strong>g> <str<strong>on</strong>g>algorithms</str<strong>on</strong>g> 303<br />
show how to dramatically speed up these two processes. Flatness testing is usually d<strong>on</strong>e for<br />
polynomial surfaces by testing whether its Brzier or B-spline points are co-planar within E,<br />
which can be very costly. Also this scheme depends <strong>on</strong> having polynomial surfaces. Wang<br />
[Wang '84] first published a means to eliminate flatness testing by determining a subdivisi<strong>on</strong><br />
depth r so that after r levels of recursive midpoint subdivisi<strong>on</strong>, all the subsurfaces are<br />
guaranteed to be flat within c. His method, which we will now describe, works very similarly to<br />
the piecewise linear approximati<strong>on</strong> algorithm given in Secti<strong>on</strong> 3.1. (We use Theorem 4 rather<br />
than his Theorem 5 for reas<strong>on</strong>s discussed earlier.) First note that after r levels of midpoint<br />
subdivisi<strong>on</strong> of the parameter space [0, 1] × [0, 1] that l I = l 2 ----- 1/2 r. Using Theorem 4 the same<br />
way as in Secti<strong>on</strong> (3.1), we have<br />
)<br />
g MI-t- - - + =~.<br />
(2r) 2M2 (:r)2<br />
Solving for r (and taking the ceiling since r is an integer) yields<br />
We can improve Wang's algorithm in the case where <strong>on</strong>e of the parametric directi<strong>on</strong>s is flat<br />
and the other is not. For example, suppose the u directi<strong>on</strong> is flat and v directi<strong>on</strong> is not. In this<br />
case it is better to split <strong>on</strong>ly al<strong>on</strong>g c<strong>on</strong>stant v parameter lines rather than in both parametric<br />
directi<strong>on</strong>s. Then after r levels of subdivisi<strong>on</strong> we have l 1 = 1, and l 2 --1/2 ~. Again <str<strong>on</strong>g>using</str<strong>on</strong>g><br />
Theorem 4 we have<br />
and thus we get<br />
-~ (2r)2 M3 =c,<br />
1M +<br />
Although Wang's method for flatness testing is independent of the type of geometry used,<br />
his algorithm still depends<strong>on</strong> use of the B6zier c<strong>on</strong>trol points for bounding box determinati<strong>on</strong>.<br />
We now show how to get rid of this dependency and at the same time generate a bounding box<br />
with less computati<strong>on</strong>al cost. Let (P0, Pl) be the min-max bounding box of the four comers of<br />
l(u, v). Using the analysis from Secti<strong>on</strong> 3.2 we know f lies in the box (P0 - (K0, K0, K0), Pl<br />
+ (K0, Ko, K0)), where K 0 = -~(M a + 2M 2 + M3). Now c<strong>on</strong>sider the patches fa, I2, f3' and<br />
f4 generated from midpoint subdivisi<strong>on</strong> of f. Let (P0i, Px;) be the min-max bounding box of<br />
the four comers point of patch ~. Then it is easy to see that (P0,- (K1, Ka, K1), Pl, +<br />
(Ka, K1, Ka)) <str<strong>on</strong>g>bounds</str<strong>on</strong>g> L, where K 1 = Ko/4. Using inducti<strong>on</strong>, it is also easy to show that given<br />
K~ from subdivisi<strong>on</strong> level i, /£,+1 = Ky4 is the amount needed to 'swell' the bounding box of<br />
the comers of a sub-patch from recursive level i + 1 in order to bound that subpatch. The<br />
following pseudo-code should further illustrate the ideas presented in this secti<strong>on</strong>. For simplic-<br />
ity we exclude the optimizati<strong>on</strong> to Wang's method when the surface is flat in <strong>on</strong>e directi<strong>on</strong>.<br />
Procedure SURFACE_INTERSECT(S1, $2, tolerance)<br />
/. intersect surface $1 and $2 to an accuracy of tolerance •/<br />
K1 = (M1 + 2 * M2 + M3)/8 <str<strong>on</strong>g>using</str<strong>on</strong>g> M1, M2, M3 from $1 / • Swell factor * /<br />
rl = log 4(K1/tolerance)/. necessary subdivisi<strong>on</strong> depth for flatness */<br />
K2 = (M1 + 2 * M2 + M3)/8 <str<strong>on</strong>g>using</str<strong>on</strong>g> M1, M2, M3 from $2<br />
r2 = log 4(K1/tolerance)
304 D. Filip et al. / <str<strong>on</strong>g>Surface</str<strong>on</strong>g> <str<strong>on</strong>g>algorithms</str<strong>on</strong>g><br />
SURF2I(0, S1, SI(0, 0), SI(1, 0), SI(0, 1), SI(1, 1), 0, 0, 1, 1, K1, rl, $2, $2(0, 0), $2(1,0),<br />
$2(0, 1), $2(1, 1), 0, 0, 1, 1, K2, r2)<br />
END SURFACE INTERSECT<br />
Procedure SURF2I(d, S1, P1, P2, P3, P4, ull, vll, u12, v12, K1, rl, $2, Q1, Q2, Q3, Q4, u21,<br />
v21, u22, v22, K2, r2)<br />
/* Input parameter d: the current subdivisi<strong>on</strong> depth */<br />
/* Input Parameters for S1 ($2 are similar): */<br />
/. P1, P2, P3, P4 are c<strong>on</strong>ers points */<br />
/* (ull, vll) is lower left corner of parameter domain •/<br />
/* (u12, v12) is upper right comer of parameter domain */<br />
/. K1 is bounding box swell factor * ,/<br />
/* rl is the maximum subdivisi<strong>on</strong> depth necessary •/<br />
(A0, A1) = min-max bounding box of (P1, P2, P3, P4}<br />
A0 = A0 - (K1, K1, K1)<br />
A1 = A1 + (K1, K1, K1)<br />
(B0, B1) = min-max bounding box of (Q1, Q2, Q3, Q4}<br />
B0 = B0 - (K2, K2, K2)<br />
B1 = B1 + (K2, K2, K2)<br />
if (A0, A1) and (B0, B1) do not intersect<br />
then return<br />
else if kl >/rl and k2 >~ r2 then /* S1 and $2 are flat * ,/<br />
Output intersecti<strong>on</strong> curve of the linear approximati<strong>on</strong>s to S1 and $2<br />
else if kl >~ rl and k2 < r2 then /* S1 flat and $2 not flat */<br />
/* <strong>on</strong>ly generate subpatches for $2 */<br />
u2 = (u21 + u22)/2<br />
v2 = (v21 + v22)/2<br />
Q5 = $2(u2, v21)<br />
Q6 = $2(u21, v2)<br />
Q7 = $2(u2, v2)<br />
Q8 = $2(u22, v2)<br />
Q9 = $2(u2, v22)<br />
SURF2I(d + 1, $1, P1, P2, P3, P4, ull, vll, u12, v12, K1, rl,<br />
$2, Q1, Q5, Q7, Q6, u21, v21, u2, v2, K2/4, r2)<br />
SURF2I(d + 1, S1, P1, P2, P3, P4, u/l, vll, u12, v12, K1, rl,<br />
$2, Q5, Q2, Q7, Q8, u2, v21, u22, v2, K2/4, r2)<br />
SURF2I(d + 1, S1, P1, P2, P3, P4, ull, vll, u12, v12, K1, rl,<br />
$2, Q6, Q7, Q3, Q9, u21, v2, u2, v22, K2/4, r2)<br />
SURF2I(d + 1, S1, P1, P2, P3, P4, ull, vll, u12, v12, K1, rl,<br />
$2, Q7, Q8, Q9, Q4, u2, v2, u22, v22, K2/4, r2)<br />
else if kl < rl and k2 >t r2 then ... /* $2 flat and S1 not flat ,,/<br />
else ... /* both $1 and $2 are not flat * ,/<br />
END SURF2I<br />
We remark here <strong>on</strong> some properities of this algorithm. First, it is independent of any surface<br />
representati<strong>on</strong> and <strong>on</strong>ly depends <strong>on</strong> being able to evaluate the surface and knowing <str<strong>on</strong>g>bounds</str<strong>on</strong>g> <strong>on</strong><br />
the sec<strong>on</strong>d order partials of the surfaces. Sec<strong>on</strong>d, the algorithm <strong>on</strong>ly needs to subdivide the<br />
parameter space and does not need to subdivide the surface definiti<strong>on</strong>, like in traditi<strong>on</strong>al B6zier<br />
subdivisi<strong>on</strong>. Third, the algorithm is adaptive in the sense that <strong>on</strong>ly the porti<strong>on</strong>s of the surfaces<br />
whose bounding boxes intersect need to be subdivided. Fourth, it is <strong>on</strong>ly necessary to find the
D. Filip et at. / <str<strong>on</strong>g>Surface</str<strong>on</strong>g> <str<strong>on</strong>g>algorithms</str<strong>on</strong>g> 305<br />
min-max box of the comer points to generate the bounding box of the surface rather than<br />
finding the min-max of all the c<strong>on</strong>trol points (if the surface is a polynomial). Also note that K1<br />
and K2 are independent of the tolerance and so may be computed <strong>on</strong>ce and then stored with<br />
the surface definiti<strong>on</strong>. From empirical evidence we find that even if the surface is a polynomial<br />
that this algorithm can run an order of magnitude or more faster than the traditi<strong>on</strong>al algorithm<br />
based <strong>on</strong> subdivisi<strong>on</strong> and flatness testing of the c<strong>on</strong>trol points. One reas<strong>on</strong> is that all the<br />
evaluati<strong>on</strong>s can be d<strong>on</strong>e <str<strong>on</strong>g>using</str<strong>on</strong>g> Homer's rule <strong>on</strong> the power basis form of a polynomial. As in<br />
almost every surface intersector, the output of the line segments must be sorted if c<strong>on</strong>tiguous<br />
intersecti<strong>on</strong> curves are desired. These intersecti<strong>on</strong> curves may then be refined by a Newt<strong>on</strong> like<br />
method to generate more accurate curves [Hought<strong>on</strong> et al. '85].<br />
4. Calculating the <str<strong>on</strong>g>bounds</str<strong>on</strong>g> of the partials of order two<br />
In this secti<strong>on</strong> we discuss how to obtain the numbers M 1 = l[ a2I/<strong>on</strong>2 II, ME = II o2f/auav II,<br />
and M 3 = II a21/av2 II. Fortunately these numbers can be calculated in a straightforward<br />
manner for many of the comm<strong>on</strong> surface types used in CAGD. Also, it is not important that<br />
the calculati<strong>on</strong> of these numbers be d<strong>on</strong>e very quickly since they <strong>on</strong>ly need be d<strong>on</strong>e <strong>on</strong>ce for a<br />
given surface as a preprocessing step and then stored with the surface definiti<strong>on</strong>. Because many<br />
of the formulas for <str<strong>on</strong>g>bounds</str<strong>on</strong>g> <strong>on</strong> the surfaces can be broken down into a sequence of curve<br />
problems, we first discuss finding <str<strong>on</strong>g>bounds</str<strong>on</strong>g> for curves. The <str<strong>on</strong>g>bounds</str<strong>on</strong>g> for curves are also needed if<br />
the <str<strong>on</strong>g>algorithms</str<strong>on</strong>g> described in Secti<strong>on</strong> 3 are applied to the curve case.<br />
4.1. Bounds <strong>on</strong> curves<br />
To find the <str<strong>on</strong>g>bounds</str<strong>on</strong>g> of the partials of order two for some of the surfaces discussed in the next<br />
secti<strong>on</strong>, we require knowledge of the <str<strong>on</strong>g>bounds</str<strong>on</strong>g> of certain curves and their <strong>derivatives</strong> of order <strong>on</strong>e<br />
and two. The curves involved are often polynomials or rati<strong>on</strong>al polynomials. In this secti<strong>on</strong> we<br />
<strong>on</strong>ly discuss finding these <str<strong>on</strong>g>bounds</str<strong>on</strong>g> for curves which are functi<strong>on</strong>s from [0, 1] to the reals since<br />
the surface case usually deals with <str<strong>on</strong>g>bounds</str<strong>on</strong>g> for each comp<strong>on</strong>ent functi<strong>on</strong> seperately and then<br />
later combines the <str<strong>on</strong>g>bounds</str<strong>on</strong>g>.<br />
One simple method for finding the desired <str<strong>on</strong>g>bounds</str<strong>on</strong>g> <strong>on</strong> a polynomial curve c(t) of degree n is<br />
first to write it in its B~zier form (Boehm et al. '84]<br />
where<br />
i=n<br />
c( t ) = ~ biB~,<br />
i=0<br />
i 1 - t)n-lt i<br />
u~[0,1], b~R,<br />
is an element of the Bemstein basis (a basis for the vector space of polynomials of degree n).<br />
Because each basis element is positive over [0, 1] and the basis forms a partiti<strong>on</strong> of unity (i.e.<br />
sum to <strong>on</strong>e), it is easy to show<br />
sup Ic(t) l~< max (Ibil}.<br />
tE[O,1] O
306 D. Filip et al. / <str<strong>on</strong>g>Surface</str<strong>on</strong>g> <str<strong>on</strong>g>algorithms</str<strong>on</strong>g><br />
The derivative of a Brzier curve is a Brzier curve of lower degree<br />
and thus<br />
n-1<br />
c'(t)= Y'~ n(bi+a-bi)B n-l,<br />
i=0<br />
n-2<br />
c"(t) = ~, n(n- 1)(6/+ 2 -- 2bi+a + bi)BF -1,<br />
i=0<br />
sup Ic'(t)l~
neously by <str<strong>on</strong>g>using</str<strong>on</strong>g> the<br />
represented. The x(u,<br />
D. Filip et aL/ <str<strong>on</strong>g>Surface</str<strong>on</strong>g> <str<strong>on</strong>g>algorithms</str<strong>on</strong>g> 307<br />
power basis form, by which all these other forms can also be exactly<br />
v) comp<strong>on</strong>ent of a degree n by m polynomial takes the form<br />
),<br />
x(u, v)= ai,jv j u, ai, j~R.<br />
i=0 \j=O ]<br />
We can also write the surface in another way<br />
where<br />
x(u, o)= E c,(v)u,<br />
i=0<br />
n<br />
i (4.1)<br />
rn<br />
ci(v)= E ai,j v'i. (4.2)<br />
y=O<br />
Using this form, it is easy to obtain the <str<strong>on</strong>g>bounds</str<strong>on</strong>g> needed. We first calculate the numbers (Ai, k }<br />
<str<strong>on</strong>g>using</str<strong>on</strong>g> the curve case, where<br />
Ai,k=su p dkc~(V)dv ~ , O
308 D. Filip et al. / <str<strong>on</strong>g>Surface</str<strong>on</strong>g> <str<strong>on</strong>g>algorithms</str<strong>on</strong>g><br />
Three special cases frequently used are<br />
(1) Translati<strong>on</strong>al Sweep. A 2½-D surface results when D(v) is a linear curve and k(v) is a<br />
c<strong>on</strong>stant functi<strong>on</strong>.<br />
(2) 3-D Sweep. Let k(v)= 1. Then S(u, v) can be thought of as C(u) being swept al<strong>on</strong>g<br />
D(v) or visa-versa.<br />
(3) Spherical Product [Barr '81]. Let da(v ) = d2(v ) = c3(u ) = 0. So<br />
x(u,v)=k(v)q(u),<br />
y(u, v)=k(v)c2(u ),<br />
z(u, v)=da(v ).<br />
Then C(u)= [ca(u) c2(u) 0] is a curve in the x-y plane and E(v)= [k(v) d3(v)] can be<br />
c<strong>on</strong>sidered a curve in the x-z plane. Any quadric or superquadric [Barr '81] can be parame-<br />
trized as a spherical product of c<strong>on</strong>ics or superc<strong>on</strong>ics. If C(u) is some parameterizati<strong>on</strong> of the<br />
unit circle, then S(u, v) is a surface of revoluti<strong>on</strong> with cross secti<strong>on</strong> E(v) and axis [0 0 1].<br />
Since in the general case all three comp<strong>on</strong>ent functi<strong>on</strong>s look identical, we just c<strong>on</strong>sider the<br />
X(U, V) = k(V)Cl(U ) + dl(V ) comp<strong>on</strong>ent:<br />
a x(u, o)<br />
OU 2<br />
= k(v)<br />
d2q(u)<br />
du 2<br />
5. Geometric vs. parametric distance<br />
D. Filip et al. / <str<strong>on</strong>g>Surface</str<strong>on</strong>g> <str<strong>on</strong>g>algorithms</str<strong>on</strong>g> 309<br />
C<br />
k<br />
Fig. 3. Each point of the curve C is<br />
within the tolerance of some point <strong>on</strong> the<br />
line segment L, but the line is still not a<br />
good approximati<strong>on</strong> to the curve.<br />
So far we have been defining the distance between a functi<strong>on</strong> f and an approximati<strong>on</strong> 1<br />
both over some domain D to be<br />
sup II f(v) - l(P)ll,<br />
P~D<br />
which we now define as the parametric distance de( f, i). However, for some applicati<strong>on</strong>s such<br />
as display of a surface, this parametric distance is not important as l<strong>on</strong>g as each point of f(D)<br />
is within the tolerance t of some point of l(D). C<strong>on</strong>sider the following definiti<strong>on</strong> of the<br />
distance between two functi<strong>on</strong>s g and h <strong>on</strong> a domain D.<br />
dG,(g, h) = sup ( inf lIB- All}.<br />
A ~g(D) k B~h(D)<br />
In our case we want da, ( f, l)
310 D. Filip et al. / <str<strong>on</strong>g>Surface</str<strong>on</strong>g> <str<strong>on</strong>g>algorithms</str<strong>on</strong>g><br />
Now let C2(v ) =/(u o, v), L2(v ) = (1 - v)f(A) + of(C), and let C3(/3 ) =/(u o + ll, v), L3(v )<br />
= (1 - v)I(B) + of(D). Then<br />
and similarly<br />
d(P 2, Q)
D. Filip et al. / <str<strong>on</strong>g>Surface</str<strong>on</strong>g> <str<strong>on</strong>g>algorithms</str<strong>on</strong>g> 311<br />
Lane, J.M. and Carpenter, L. (1979), A generalized ~ line algorithm for the computer display of parametrically<br />
defined surfaces, Computer Visi<strong>on</strong>, Graphics, and Image Processing 11, 290-297.<br />
Lane, J.M. and Riesenfeld, R.F. (1980), A theoretical development for the computer generati<strong>on</strong> and display of<br />
piecewise polynomial surfaces, IEEE Trans. Pattern Anal. Machine InteU. 2 (1) 35-46.<br />
Lane, J.M. and Riesenfeld, R.F. (1981), Bounds <strong>on</strong> a polynomial, BIT 21, 112-117.<br />
Prenter, P.M. (1975), Splines and Variati<strong>on</strong>al Methods, Wiley, New York.<br />
Wang, G. (1984), The subdivisi<strong>on</strong> method for finding the intersecti<strong>on</strong> between two B~zier curves or surfaces, Zhejiang<br />
University J., Special Issue <strong>on</strong> Computati<strong>on</strong>al Geometry (in Chinese).