

Tutorial on Fast Marching Method - Robotics Algorithms & Motion ...
Tutorial on Fast Marching Method - Robotics Algorithms & Motion ...
Tutorial on Fast Marching Method - Robotics Algorithms & Motion ...

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
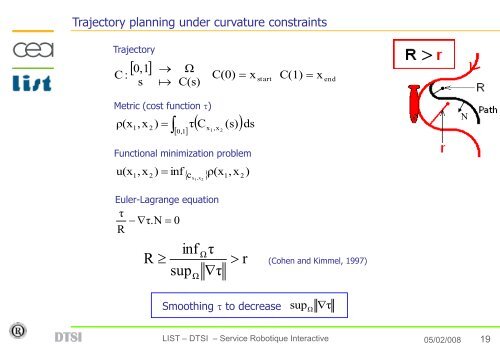
Trajectory planning under curvature c<strong>on</strong>straints<br />
Trajectory<br />
C:<br />
0,1 s<br />
<br />
<br />
Metric (cost functi<strong>on</strong> t)<br />
<br />
Ω<br />
C(s)<br />
0, <br />
C (s) <br />
ρ(x1, x 2)<br />
τ x , x<br />
1 1 2<br />
Euler-Lagrange equati<strong>on</strong><br />
τ<br />
τ.N<br />
0<br />
R<br />
R<br />
inf<br />
<br />
sup<br />
C(0) x start C(1) x end<br />
τ<br />
τ<br />
DTSI LIST – DTSI – Service Robotique Interactive<br />
Ω<br />
Ω <br />
ds<br />
Functi<strong>on</strong>al minimizati<strong>on</strong> problem<br />
u(x1, x2<br />
) inf c ρ(x1,<br />
x2<br />
)<br />
x1<br />
, x2<br />
Smoothing t to decrease<br />
r<br />
(Cohen and Kimmel, 1997)<br />
supΩ τ<br />
05/02/008<br />
N<br />
19