Prakties 2 - Electrical, Electronic and Computer Engineering
Prakties 2 - Electrical, Electronic and Computer Engineering
Prakties 2 - Electrical, Electronic and Computer Engineering

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
Departement Elektriese,<br />
Elektroniese en Rekenaar-<br />
Ingenieurswese<br />
<strong>Prakties</strong> 2:<br />
Ontwerp en realisering<br />
van PID beheerders<br />
Kopiereg voorbehou<br />
Beheerstelsels<br />
EBB320<br />
Department of <strong>Electrical</strong>,<br />
<strong>Electronic</strong> <strong>and</strong> <strong>Computer</strong><br />
<strong>Engineering</strong><br />
Practical 2:<br />
Design <strong>and</strong> realisation of<br />
PID controllers<br />
Copyright reserved<br />
Control Systems<br />
EBB320<br />
Compiled by Hein Swart <strong>and</strong> Prof F. R. Camisani-Calzolari. Updated by Björn Matthews<br />
1. Introduction<br />
The aim of this practical is to design <strong>and</strong> build PID controllers to control the system built in Practical 1.<br />
2. Background<br />
A basic knowledge of the following is needed:<br />
1. Cohen-Coon tuning by using the process reaction curve (p.169 in Goodwin et al., (2001))<br />
2. Ziegler-Nichols oscillation method (p.162 in Goodwin et al., (2001) or p.317 in Seborg et al.,<br />
(2004))<br />
3. Bode stability criterion (p.365 in Seborg et al., (2004))<br />
A short description of each of these topics is given next. Please refer to references for more complete<br />
descriptions.<br />
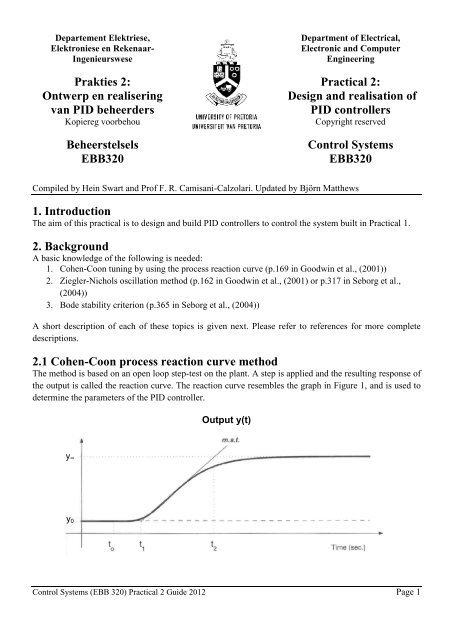
2.1 Cohen-Coon process reaction curve method<br />
The method is based on an open loop step-test on the plant. A step is applied <strong>and</strong> the resulting response of<br />
the output is called the reaction curve. The reaction curve resembles the graph in Figure 1, <strong>and</strong> is used to<br />
determine the parameters of the PID controller.<br />
y∞<br />
y0<br />
Output y(t)<br />
Control Systems (EBB 320) Practical 2 Guide 2012 Page 1
Figure 1. Reaction curve (m.s.t = maximum slope tangent. Reproduced from Goodwin et al., (2001))<br />
The values for , <strong>and</strong> are read off from the reaction curve where is the time at which the step was<br />
applied, is the time at which the system starts to react <strong>and</strong> is the time where the maximum slope<br />
tangent (drawn from ) intercepts the steady state output value. Once , <strong>and</strong> have been<br />
determined from the graph, the dead time, approximate time constant <strong>and</strong> gain are calculated. The dead<br />
time of the system is calculated as . The approximate time constant is <strong>and</strong> the<br />
gain is calculated as:<br />
where is the output <strong>and</strong> is the input. These values are then substituted into the equations from the<br />
following table to determine the PID parameters.<br />
[<br />
]<br />
( )<br />
Table 1: Controller settings for the Cohen-Coon process reaction curve method<br />
The st<strong>and</strong>ard form for the PID controller is given by:<br />
( ) (<br />
Note that the values in Table 1 (<strong>and</strong> Table 2) are given for the st<strong>and</strong>ard PID controller form.<br />
2.2 Ziegler-Nichols oscillation method<br />
This method is described in Seborg et al., (2004) as follows:<br />
1. After the process has reached steady state, eliminate the integral <strong>and</strong> derivative action (i.e.<br />
implement proportional only control).<br />
2. Set the controller gain to a small non-zero value.<br />
3. Introduce a small momentary set-point change <strong>and</strong> observe the output. Gradually increase the<br />
controller gain <strong>and</strong> repeat the introduction of the momentary set-point change until sustained<br />
oscillation is seen at the output. The oscillation at the output should have a constant amplitude (i.e.<br />
it should not die out over time). The numerical value of the proportional controller gain that<br />
produces the continuous oscillation is called the ultimate gain . The period of the oscillation is<br />
called the ultimate period .<br />
4. Calculate the PID controller settings from the Ziegler-Nichols tuning settings table.<br />
Ziegler-Nichols Method<br />
PID<br />
Table 2: Controller settings based on the Ziegler-Nichols oscillation method<br />
Control Systems (EBB 320) Practical 2 Guide 2012 Page 2<br />
)
The numeric value for the ultimate controller gain may be calculated from the method of Goodwin et al.,<br />
(2001) (p.162) or from the Bode stability criterion (in Seborg p.317, (2004)).<br />
2.3 Bode stability criterion<br />
The Bode stability criterion is a method to evaluate the stability of a system containing time delays. There<br />
is a host of applications for this method but all we are interested in is the calculation of the ultimate<br />
controller gain that leads to sustained oscillation. This gain is achieved at the point where the system is<br />
marginally stable. From the Bode stability criterion this is the point where or equivalently<br />
| | <strong>and</strong> . Here is the open loop transfer function. In our case it is simply the<br />
product of the proportional controller <strong>and</strong> the plant transfer function (first order plus time delay).<br />
Rewrite the open loop transfer function into magnitude <strong>and</strong> phase form. Determine the frequency at<br />
which the phase becomes . At this frequency the magnitude must equal 1 for marginal stability.<br />
Substitute the calculated frequency back into the magnitude equation <strong>and</strong> solve for the ultimate controller<br />
gain.<br />
3. Additional circuits<br />
The controller ( ) can be written in the following form:<br />
( ) ( )<br />
( ) [(<br />
Note that you will need to rewrite the st<strong>and</strong>ard PID controller form, given in section 2.1, into this form to<br />
calculate the component values.<br />
Figure 1: Realization of controller ( ( )).<br />
Control Systems (EBB 320) Practical 2 Guide 2012 Page 3<br />
)<br />
⁄<br />
]
Figure 2: Realisation of controller with <strong>and</strong> represented by resistors <strong>and</strong> capacitors.<br />
The implementation of the controller is shown in Figure 1 <strong>and</strong> Figure 2.<br />
4. Closed Loop System<br />
The closed loop system is shown in Figure 3 <strong>and</strong> can be implemented as in Figure 4.<br />
Figure 3: The closed loop system.<br />
Figure 4: The closed loop system for practical implementation.<br />
The summation function can be implemented as in Figure 5. Set . is the feedback signal,<br />
is the set point input <strong>and</strong> is the input of the controller.<br />
Control Systems (EBB 320) Practical 2 Guide 2012 Page 4
Figure 5: The implementation of the summation function.<br />
5. Preparation<br />
All pre-assignments must be done in the lab book (of each student) <strong>and</strong> will be marked during the<br />
practical session. Each member of the group must participate in the preparation.<br />
1. Design (i.e. calculate the tuning parameters) a PID controller by simulating the step response of<br />
the plant of practical 1, <strong>and</strong> making use of the Cohen-Coon reaction curve method. Use the system<br />
with the Padé approximation applied.<br />
2. Design a PID controller from the Ziegler-Nichols oscillation method by theoretically calculating<br />
the ultimate controller gain <strong>and</strong> ultimate oscillation period from the transfer function of the<br />
system. Use the system with the Padé approximation applied.<br />
3. Compute the capacitor <strong>and</strong> resistor values for each of the designed PID controllers.<br />
4. Simulate the closed loop system using both controllers (see Figure 4). Measure the peak time ( ),<br />
percentage overshoot ( ) <strong>and</strong> steady-state-error from each simulation.<br />
(Note that the simulations may be done in PSpice or Simulink. The setup <strong>and</strong> the results of each<br />
simulation should be explicitly indicated.)<br />
6. Lab assignments<br />
1. Build the Cohen-Coon controller you designed in 5.1 (use own components!).<br />
2. Measure (look on oscilloscope) the system the peak time ( ), percentage overshoot ( ) <strong>and</strong><br />
steady-state-error <strong>and</strong> compare this with the controller from your simulated response. The<br />
definitions of these quantities may be found from Nise, (2008).<br />
(Note: Please build the Cohen-Coon <strong>and</strong> Ziegler-Nichols controllers separately such that they can be<br />
interchanged easily in the demo. They should however be implemented on the same plant).<br />
3. Build the Ziegler-Nichols controller (as designed in 5.2).<br />
4. Measure , <strong>and</strong> the steady-state-error for the system with the Ziegler-Nichols controller<br />
implemented, <strong>and</strong> compare this with the simulation results found in 5.4.<br />
Control Systems (EBB 320) Practical 2 Guide 2012 Page 5
7. Report<br />
The report must be written in English <strong>and</strong> include the following:<br />
1. Design of the PID controller with the Cohen-Coon method.<br />
2. Design of the controller with the Ziegler-Nichols oscillation method.<br />
3. Component values calculated for realisation of the controllers.<br />
4. The measured , <strong>and</strong> steady-state-error values from the simulations as well as from the<br />
practical results.<br />
5. Comparison of these values for the simulation <strong>and</strong> practically implemented controllers.<br />
6. PSpice or Simulink simulation of the closed loop systems.<br />
7. Discussion of results.<br />
8. A conclusion.<br />
8. Demo<br />
The demo will be based on the following:<br />
1. Lab books with completed preparation assignments.<br />
2. Closed loop response of the implemented Cohen-Coon based PID controller.<br />
3. Closed loop response of the implemented Ziegler-Nichols based PID controller.<br />
4. Performance measures achieved ( , <strong>and</strong> steady-state-error) for the practical controllers.<br />
5. Answering of questions.<br />
(Note: Please build the Cohen-Coon <strong>and</strong> Ziegler-Nichols controllers separately such that they can be<br />
interchanged easily in the demo. They should however be implemented on the same plant).<br />
9. References<br />
[1] Goodwin, G.C., Graebe, S.F., Salgado, M.E., Control System Design, 2001, Prentice Hall.<br />
[2] Seborg, D.E., Edgar, T.F., Mellichamp, D.A, Process Dynamics <strong>and</strong> Control, 2004, Wiley.<br />
[3] Norman S. Nise, Control Systems <strong>Engineering</strong>, 5th Ed., 2008, John Wiley & Sons.<br />
Control Systems (EBB 320) Practical 2 Guide 2012 Page 6