2000-01-0132 Integrated Motor Drive Unit A Mechatronics ... - Delphi
2000-01-0132 Integrated Motor Drive Unit A Mechatronics ... - Delphi
2000-01-0132 Integrated Motor Drive Unit A Mechatronics ... - Delphi

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
SAE TECHNICAL<br />
PAPER SERIES <strong>2000</strong>-<strong>01</strong>-<strong>01</strong>32<br />
<strong>Integrated</strong> <strong>Motor</strong> <strong>Drive</strong> <strong>Unit</strong><br />
A <strong>Mechatronics</strong> Packaging Concept for<br />
Automotive Electronics<br />
Jeff Burns and Suresh Chengalva<br />
<strong>Delphi</strong> Delco Electronics Systems<br />
SAE <strong>2000</strong> World Congress<br />
Detroit, Michigan<br />
March 6-9, <strong>2000</strong><br />
400 Commonwealth <strong>Drive</strong>, Warrendale, PA 15096-00<strong>01</strong> U.S.A. Tel: (724) 776-4841 Fax: (724) 776-5760
The appearance of this ISSN code at the bottom of this page indicates SAE’s consent that copies of the<br />
paper may be made for personal or internal use of specific clients. This consent is given on the condition,<br />
however, that the copier pay a $7.00 per article copy fee through the Copyright Clearance Center, Inc.<br />
Operations Center, 222 Rosewood <strong>Drive</strong>, Danvers, MA <strong>01</strong>923 for copying beyond that permitted by Sections<br />
107 or 108 of the U.S. Copyright Law. This consent does not extend to other kinds of copying such as<br />
copying for general distribution, for advertising or promotional purposes, for creating new collective works,<br />
or for resale.<br />
SAE routinely stocks printed papers for a period of three years following date of publication. Direct your<br />
orders to SAE Customer Sales and Satisfaction Department.<br />
Quantity reprint rates can be obtained from the Customer Sales and Satisfaction Department.<br />
To request permission to reprint a technical paper or permission to use copyrighted SAE publications in<br />
other works, contact the SAE Publications Group.<br />
No part of this publication may be reproduced in any form, in an electronic retrieval system or otherwise, without the prior written<br />
permission of the publisher.<br />
ISSN <strong>01</strong>48-7191<br />
Copyright <strong>2000</strong> Society of Automotive Engineers, Inc.<br />
Positions and opinions advanced in this paper are those of the author(s) and not necessarily those of SAE. The author is solely<br />
responsible for the content of the paper. A process is available by which discussions will be printed with the paper if it is published in<br />
SAE Transactions. For permission to publish this paper in full or in part, contact the SAE Publications Group.<br />
Persons wishing to submit papers to be considered for presentation or publication through SAE should send the manuscript or a 300<br />
word abstract of a proposed manuscript to: Secretary, Engineering Meetings Board, SAE.<br />
Printed in USA<br />
All SAE papers, standards, and selected<br />
books are abstracted and indexed in the<br />
Global Mobility Database
1<br />
<strong>2000</strong>-<strong>01</strong>-<strong>01</strong>32<br />
<strong>Integrated</strong> <strong>Motor</strong> <strong>Drive</strong> <strong>Unit</strong><br />
A <strong>Mechatronics</strong> Packaging Concept for Automotive Electronics<br />
Copyright © <strong>2000</strong> Society of Automotive Engineers, Inc.<br />
ABSTRACT<br />
This study presents a unique design for combining an<br />
electric motor and its drive circuitry into one integrated<br />
package.<br />
Electric motors used in systems such as electric power<br />
steering applications commonly consist of a separate<br />
electric motor and drive controller. There are several disadvantages<br />
to this approach. First, the mounting of two<br />
separate items into the system takes extra room and<br />
increases assembly complexity. There are several disadvantages<br />
associated with the wires that interconnect the<br />
two units. The long wires introduce additional electrical<br />
resistance. Also, they can act as antennas that both<br />
receive and radiate electromagnetic interference.<br />
Mounting a miniaturized motor drive unit directly to the<br />
side of the motor achieves some of the advantages of a<br />
fully integrated approach but only to a limited extent.<br />
Wires still exit the motor and must be attached to the<br />
drive unit. Angular position sensors must be mounted to<br />
the motor separate from the drive unit. This results in<br />
extra electrical connections that add cost and are potential<br />
points of failure.<br />
The design presented in this paper places the power<br />
drive section of the controller directly on the end of the<br />
motor. The digital control board is so placed that sensors<br />
for measuring the angular position of the motor can be<br />
placed directly on the PCB board. This results in a small<br />
package with a minimum number of connections. The<br />
viability of this design, from the standpoint of heat transfer,<br />
is demonstrated using finite element analysis. Varying<br />
parameters in the finite element model identifi the<br />
most critical design parameters.<br />
The insights into the nature of mechatronic design gained<br />
through this design study are discussed.<br />
PROBLEM DEFINITION<br />
Jeff Burns and Suresh Chengalva<br />
<strong>Delphi</strong> Delco Electronics Systems<br />
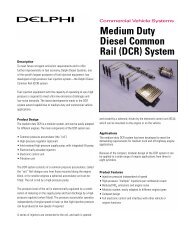
Electric Power Steering (Figure 1) systems use an electric<br />
motor to provide steering assistance. The space<br />
available in the automobile for this motor, and it’s associated<br />
drive circuitry, is minimal.<br />
Figure 1. Electic Power Steering System<br />
Traditionally the power module and electronic controller<br />
for an electric motor are in a box, or boxes, separate from<br />
the motor. There are several disadvantages to this. First,<br />
multiple boxes take extra room and increases assembly<br />
complexity. There are also several disadvantages associated<br />
with the wires that interconnect the units. The long<br />
wires introduce unwanted electrical resistance, and can<br />
act as antennas that both receive and radiate electromagnetic<br />
interference.<br />
To solve these problems it is desirable to integrate the<br />
<strong>Motor</strong>, Power Module, and Electronic Controller into one<br />
package. Mounting a miniaturized motor drive unit<br />
directly to the side of the motor (Figure 2) is a good step<br />
in this direction. Unfortunately, wires still exit the motor<br />
and must be attached to the drive unit. The angular position<br />
sensors are mounted separately from the drive unit.<br />
This results in extra electrical interconnections that are<br />
costly and prone to failure.
Figure 2. Early <strong>Integrated</strong> <strong>Motor</strong><br />
The goal of this design study is to integrate an electric<br />
motor and its associated electronics to the maximum<br />
extent possible.<br />
DESIGN DESCRIPTION<br />
This design approach, illustrated in figures 3 and 4,<br />
mounts semiconductor switches, normally MOSFET's, on<br />
a power distribution bus that is mounted between the<br />
motor and the motor drive unit. Also, motor position sensors<br />
rest directly on the system control board.<br />
1<br />
2<br />
3<br />
4<br />
5<br />
6<br />
Figure 3. Cutaway View<br />
7<br />
8<br />
9<br />
14<br />
13<br />
12<br />
11<br />
10<br />
2<br />
5<br />
11<br />
8<br />
10<br />
Figure 4. Exploded View<br />
3<br />
The semiconductor switches (2) are attached directly to a<br />
power distribution bus (11). This power distribution bus is<br />
made of a highly thermally and electrically conductive<br />
material such as copper. This power distribution bus is<br />
attached to the bottom of the case (5) using an electrically<br />
isolating, but thermally conductive, double sided<br />
tape. A second electrical isolation pad is placed between<br />
the distribution bus (11) and the motor endcap(8). This<br />
pad must be highly thermally conductive. Heat dissipated<br />
in the semiconductor switches (2) is conducted through<br />
the power distribution bus (11) to both the motor end cap<br />
(8) and the case (5). From these two parts the heat conducts<br />
through various parts of the integrated motor structure<br />
until it is dissipted into the surrounding air.<br />
Inside the case (5) an interconnect board (4) is used to<br />
connect various electrical parts (6) and the power distribution<br />
bus (11) together to form electrical circuits. The<br />
semiconductor switches (2) are connected to the interconnect<br />
board (4) with wire bonds through windows in<br />
the case (5).<br />
Above the interconnect board (4) a system control board<br />
(13) is mounted. This control board (13) contains various<br />
electronic devices that together control the motor system.<br />
Also on the control board are sensors that together with<br />
the encoder wheel (14) monitor the angular position of<br />
the motor.<br />
6<br />
1<br />
14<br />
13<br />
4
The motor winding terminations (3) pass through the<br />
motor end cap (8), the case (5), and the system control<br />
board (4). The power distribution bus (11) has tabs that<br />
are bent upward and connect to the motor winding terminations<br />
(3). This connects the motor to the drive unit.<br />
Parts that dissipate a large amount of heat (12) may be<br />
mounted to the inside of the case.<br />
Some of the parts of the motor include the outer sleeve<br />
(10), end cap (8), bearing (9), and motor core (7).<br />
The drive unit is enclosed with a cover (1).<br />
FINITE ELEMENT ANALYSIS<br />
In this design both the semiconductor switches and the<br />
motor dissipate heat into the same structure. An obvious<br />
concern is that the two parts will heat each other. To<br />
address this question a Finite Element Analysis has been<br />
performed.<br />
Dielectric<br />
FET Frame<br />
Solder<br />
Axis of Symmetry<br />
FET<br />
Figure 5. Schematic of EPS System Level Model (2D)<br />
Table 1. Factors Considered<br />
<strong>Motor</strong> End Cap<br />
<strong>Motor</strong> Case<br />
Heat Sink<br />
Housing<br />
Winding/Core<br />
Load on End Cap <strong>Motor</strong> Case Convection He at Sink<br />
<strong>Motor</strong>/FET Thicknes Material Coefficient (Block)<br />
(%) (mm) (W/m2-C)<br />
100 6 Aluminum 0 With<br />
60 12 Steel 7 Without<br />
20 20<br />
A 2D cross-section model is schematically presented in<br />
figure 5. The maximum temperature reached by the FET<br />
is the primary response variable. Because this 2D-model<br />
will overestimate the actual die temperatures, the model<br />
is primarily useful for assessing the relative effects of various<br />
design options. A full factorial experiment with 60<br />
distinct cases was completed using the factors listed in<br />
table 1. The object labeled "heat sink" in figure 5 represents<br />
a gearbox. Because the thermal sinking abilities of<br />
the gearbox were not known it was included as a constant<br />
temperature sink in some models. For the rest of<br />
the models it was assumed be an isothermal boundary.<br />
3<br />
The motors power consumption and duty cycle are specified<br />
according to table 2.<br />
Table 2. Power Input<br />
Case 1 Case 2 Case 3<br />
% Max Power 100 60 20<br />
On Time (s) 7 90 Infinity<br />
Off Time (s) 180 1000 N/A<br />
Power in FET (W) 38.1 13.7 1.5<br />
Power in <strong>Motor</strong> (W) 210 75.6 8.4<br />
N<br />
o<br />
r<br />
m<br />
a<br />
l<br />
i<br />
z<br />
e<br />
d<br />
T<br />
e<br />
m<br />
p<br />
e<br />
r<br />
a<br />
t<br />
u<br />
r<br />
1.200<br />
1.000<br />
0.800<br />
0.600<br />
0.400<br />
With Sink<br />
0<br />
With Sink<br />
7<br />
Temperature vs LC<br />
With Sink<br />
20<br />
Heat Sink Condition<br />
Convection Coefficient<br />
Figure 6. 2D Analyses Results<br />
No Sink<br />
7<br />
No Sink<br />
20<br />
The results of all 60 cases were analyzed using graphs<br />
such as shown in figure 6. From these graphs it is evident<br />
that the percent of power applied is the most important<br />
variable affecting the FET temperature. The 100% load<br />
case always produces the highest temperatures. Furthermore,<br />
at 100% load all the other variables have little<br />
effect on the temperature. This occurs because during<br />
the short high-power pulse the energy dissipated in the<br />
FET does not have time to dissipate into the motor. This<br />
burst of energy is then falowed by a long cool down time<br />
that allows the energy to be dissipated even through a<br />
less than optimal structure. The variables in the model<br />
also have little effect on the 20% load case because the<br />
energy applied is small enough to easily be dissipated.<br />
The presence of the heat sink has a large effect in the<br />
60% power load case. This occurs because the power off<br />
portion of the cycle is not long enough to dissipate the<br />
energy through convection alone.<br />
It is also evident that for the 100% load only a small part<br />
of the structure, immediately around the FET, warms up<br />
during the power on cycle. With this in mind, a 3D model<br />
of the area immediately around the FET was constructed.<br />
The geometry for this model is pictured in figure 7. This is<br />
a 1/8’Th symmetry model of a square cutout around the<br />
FET. Two versions of the model were created. One model<br />
has a one mm thick copper layer to which the FET is<br />
mounted. In the other model the copper layer is two mm<br />
thick. Heat is applied to the top surface of the silicon chip.<br />
Because of the short duration power pulse, it is not necessary<br />
to consider any heat output from the model. The<br />
heat rise at the model extremities is small and consistent<br />
Load:<br />
20 %<br />
60 %<br />
100 %
with the 2D model results. The FET's used in this application<br />
can not exceed 175°C. A 3D model is necessary to<br />
assess if this condition can be met.<br />
2<br />
0.18<br />
0.18<br />
Dielectric<br />
Mg<br />
Figure 7. 3D Model Dimensions<br />
The temperature of the silicon in the one mm thick copper<br />
model reached 174°C. When the copper layer is<br />
increased to two mm thick the temperature is reduced by<br />
seven degrees. Obviously the goal of keeping the temperature<br />
of the silicon below 175°C can be achieved with<br />
this design concept.<br />
THE NATURE OF MECHATRONIC DESIGN<br />
Cu<br />
Al<br />
The design of most complex systems is achieved by<br />
breaking the various parts into pieces that can be<br />
designed independently. The design of each sub part<br />
may be completed by an individual working on each part<br />
in series, or by several teams that complete the parts in<br />
parallel. When the design of all the sub parts is completed<br />
they are combined together to make a complete<br />
system.<br />
Highly integrated designs, such as the one presented<br />
here, make dividing up the design into sub parts very difficult.<br />
Each and every part becomes highly dependent on<br />
the others. Members of the design team may no longer<br />
work independently, and everyone working on the project<br />
must have a strong understanding of the entire system.<br />
The challenges to integration extend beyond the design<br />
process. Electric motors and their controllers are often<br />
produced in separate manufacturing facilities. Sometimes,<br />
different corporations may even produce the two<br />
parts. Because of the high integration achieved in<br />
designs such as this one it becomes necessary to combine<br />
the manufacturing operations. Often the manufactur-<br />
Si<br />
5.842<br />
Solder<br />
0.63<br />
0.1<br />
20<br />
2<br />
4.318<br />
1-2<br />
4<br />
ing processes are not compatible with each other. For<br />
example, motors require heavy metal working operations<br />
that are inherently dirty, but electronics requires a very<br />
clean environment.<br />
Highly integrated designs can be extremely sensitive to<br />
changes in requirements. For example, suppose the<br />
torque output requirement for this motor was increased<br />
by 50 percent. This would require an increase in current<br />
through the motor. This would necessitate doubling the<br />
number of silicon devices to handle the current. Because<br />
there is no more room for these devices the whole design<br />
concept would require re-evaluation. A less integrated<br />
design would likely be more easily adapted to such<br />
changes.<br />
Highly integrated designs have many potential advantages,<br />
but they must be weighed against the added complexities<br />
during design and manufacturing.<br />
CONCLUSION<br />
This design achieves a tight integration between an electric<br />
motor and its controller. This results in a very small<br />
system package. Problems associated with interconnecting<br />
wires are minimized. The viability of the novel thermal<br />
management approach is shown through finite element<br />
analysis.<br />
CONTACT<br />
Jeffrey H. Burns<br />
Advanced Project Engineer<br />
Advanced Engineering<br />
Delco Electonics Systems<br />
World Headquarters<br />
M/C D28<br />
One Corporate Center<br />
P.O. Box 9005<br />
Kokomo, Indiana<br />
46904-9005 USA<br />
Tel: 765.451.3279<br />
Fax: 765.451.3600<br />
Email: Jeff.H.Burns@delphiauto.com<br />
Suresh K. Chengalva<br />
Project Engineer<br />
Advanced Engineering<br />
Delco Electonics Systems<br />
World Headquarters<br />
M/C D28<br />
One Corporate Center<br />
P.O. Box 9005<br />
Kokomo, Indiana<br />
46904-9005 USA<br />
Tel: 765.451.3278<br />
Fax: 765.451.3600<br />
Email: Suresh.K.Chengalva@delphiauto.com