Download - Coordinates
Download - Coordinates
Download - Coordinates

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
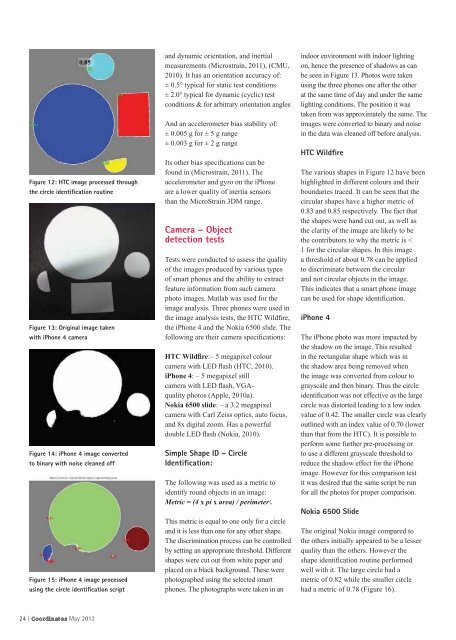
Figure 12: HTC image processed through<br />
the circle identifi cation routine<br />
Figure 13: Original image taken<br />
with iPhone 4 camera<br />
Figure 14: iPhone 4 image converted<br />
to binary with noise cleaned off<br />
Figure 15: iPhone 4 image processed<br />
using the circle identifi cation script<br />
24 | <strong>Coordinates</strong> May 2012<br />
and dynamic orientation, and inertial<br />
measurements (Microstrain, 2011), (CMU,<br />
2010). It has an orientation accuracy of:<br />
± 0.5° typical for static test conditions<br />
± 2.0° typical for dynamic (cyclic) test<br />
conditions & for arbitrary orientation angles<br />
And an accelerometer bias stability of:<br />
± 0.005 g for ± 5 g range<br />
± 0.003 g for ± 2 g range<br />
Its other bias speci cations can be<br />
found in (Microstrain, 2011). The<br />
accelerometer and gyro on the iPhone<br />
are a lower quality of inertia sensors<br />
than the MicroStrain 3DM range.<br />
Camera – Object<br />
detection tests<br />
Tests were conducted to assess the quality<br />
of the images produced by various types<br />
of smart phones and the ability to extract<br />
feature information from such camera<br />
photo images. Matlab was used for the<br />
image analysis. Three phones were used in<br />
the image analysis tests, the HTC Wild re,<br />
the iPhone 4 and the Nokia 6500 slide. The<br />
following are their camera speci cations:<br />
HTC Wildfi re:– 5 megapixel colour<br />
camera with LED ash (HTC, 2010).<br />
iPhone 4: – 5 megapixel still<br />
camera with LED ash, VGAquality<br />
photos (Apple, 2010a).<br />
Nokia 6500 slide: – a 3.2 megapixel<br />
camera with Carl Zeiss optics, auto focus,<br />
and 8x digital zoom. Has a powerful<br />
double LED ash (Nokia, 2010).<br />
Simple Shape ID – Circle<br />
Identifi cation:<br />
The following was used as a metric to<br />
identify round objects in an image:<br />
Metric = (4 x pi x area) / perimeter 2 .<br />
This metric is equal to one only for a circle<br />
and it is less than one for any other shape.<br />
The discrimination process can be controlled<br />
by setting an appropriate threshold. Different<br />
shapes were cut out from white paper and<br />
placed on a black background. These were<br />
photographed using the selected smart<br />
phones. The photographs were taken in an<br />
indoor environment with indoor lighting<br />
on, hence the presence of shadows as can<br />
be seen in Figure 13. Photos were taken<br />
using the three phones one after the other<br />
at the same time of day and under the same<br />
lighting conditions. The position it was<br />
taken from was approximately the same. The<br />
images were converted to binary and noise<br />
in the data was cleaned off before analysis.<br />
HTC Wildfi re<br />
The various shapes in Figure 12 have been<br />
highlighted in different colours and their<br />
boundaries traced. It can be seen that the<br />
circular shapes have a higher metric of<br />
0.83 and 0.85 respectively. The fact that<br />
the shapes were hand cut out, as well as<br />
the clarity of the image are likely to be<br />
the contributors to why the metric is <<br />
1 for the circular shapes. In this image<br />
a threshold of about 0.78 can be applied<br />
to discriminate between the circular<br />
and not circular objects in the image.<br />
This indicates that a smart phone image<br />
can be used for shape identi cation.<br />
iPhone 4<br />
The iPhone photo was more impacted by<br />
the shadow on the image. This resulted<br />
in the rectangular shape which was in<br />
the shadow area being removed when<br />
the image was converted from colour to<br />
grayscale and then binary. Thus the circle<br />
identi cation was not effective as the large<br />
circle was distorted leading to a low index<br />
value of 0.42. The smaller circle was clearly<br />
outlined with an index value of 0.70 (lower<br />
than that from the HTC). It is possible to<br />
perform some further pre-processing or<br />
to use a different grayscale threshold to<br />
reduce the shadow effect for the iPhone<br />
image. However for this comparison test<br />
it was desired that the same script be run<br />
for all the photos for proper comparison.<br />
Nokia 6500 Slide<br />
The original Nokia image compared to<br />
the others initially appeared to be a lesser<br />
quality than the others. However the<br />
shape identi cation routine performed<br />
well with it. The large circle had a<br />
metric of 0.82 while the smaller circle<br />
had a metric of 0.78 (Figure 16).