

Investigation of Transonic Drag Computations in Aerodynamic ...
Investigation of Transonic Drag Computations in Aerodynamic ...
Investigation of Transonic Drag Computations in Aerodynamic ...

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
<strong>Investigation</strong> <strong>of</strong> <strong>Transonic</strong> <strong>Drag</strong> <strong>Computations</strong> <strong>in</strong> APAS<br />
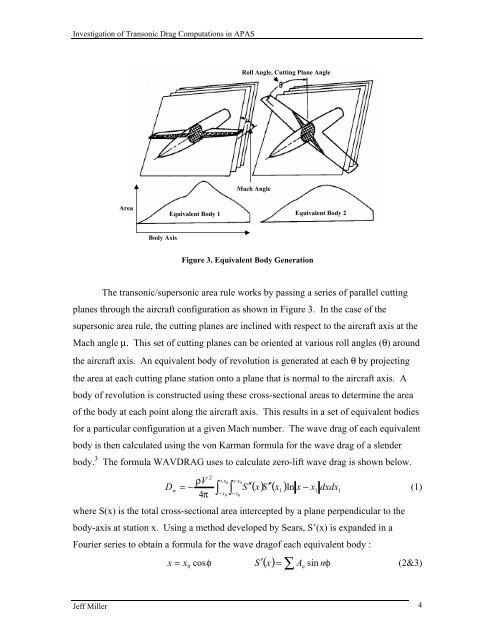
Roll Angle, Cutt<strong>in</strong>g Plane Angle<br />
Mach Angle<br />
Area<br />
Equivalent Body 1<br />
Equivalent Body 2<br />
Body Axis<br />
Figure 3. Equivalent Body Generation<br />
The transonic/supersonic area rule works by pass<strong>in</strong>g a series <strong>of</strong> parallel cutt<strong>in</strong>g<br />
planes through the aircraft configuration as shown <strong>in</strong> Figure 3. In the case <strong>of</strong> the<br />
supersonic area rule, the cutt<strong>in</strong>g planes are <strong>in</strong>cl<strong>in</strong>ed with respect to the aircraft axis at the<br />
Mach angle µ. This set <strong>of</strong> cutt<strong>in</strong>g planes can be oriented at various roll angles (θ) around<br />
the aircraft axis. An equivalent body <strong>of</strong> revolution is generated at each θ by project<strong>in</strong>g<br />
the area at each cutt<strong>in</strong>g plane station onto a plane that is normal to the aircraft axis. A<br />
body <strong>of</strong> revolution is constructed us<strong>in</strong>g these cross-sectional areas to determ<strong>in</strong>e the area<br />
<strong>of</strong> the body at each po<strong>in</strong>t along the aircraft axis. This results <strong>in</strong> a set <strong>of</strong> equivalent bodies<br />
for a particular configuration at a given Mach number. The wave drag <strong>of</strong> each equivalent<br />
body is then calculated us<strong>in</strong>g the von Karman formula for the wave drag <strong>of</strong> a slender<br />
body. 3 The formula WAVDRAG uses to calculate zero-lift wave drag is shown below.<br />
D<br />
w<br />
ρV<br />
−<br />
4π<br />
2<br />
+ x<br />
+ x<br />
0 0<br />
= ∫−<br />
x ∫<br />
0 −x0<br />
S ′′<br />
( x) S ′′ ( x1) ln x − x1<br />
dxdx1<br />
where S(x) is the total cross-sectional area <strong>in</strong>tercepted by a plane perpendicular to the<br />
body-axis at station x. Us<strong>in</strong>g a method developed by Sears, S’(x) is expanded <strong>in</strong> a<br />
Fourier series to obta<strong>in</strong> a formula for the wave drag<strong>of</strong> each equivalent body :<br />
x =<br />
x 0<br />
cosφ<br />
( x) = ∑<br />
(1)<br />
S′ An s<strong>in</strong> nφ<br />
(2&3)<br />
Jeff Miller 4













