Algorithm Theoretical Based Document (ATBD) - CESBIO
Algorithm Theoretical Based Document (ATBD) - CESBIO
Algorithm Theoretical Based Document (ATBD) - CESBIO

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
SO-TN-ESL-SM-GS-0001<br />
Issue 1.a<br />
Date: 31/08/2006<br />
SMOS level 2 processor<br />
Soil moisture <strong>ATBD</strong><br />
2θ<br />
TB p<br />
SMOS<br />
sensor<br />
TB Sk<br />
TB atm<br />
External<br />
Contributions<br />
TB atm<br />
Atmosphere<br />
atm<br />
, TB<br />
atm<br />
τ<br />
Layer<br />
Above<br />
Surface<br />
Layer<br />
T c<br />
τ ,ω ,<br />
c T c<br />
Tc<br />
T g<br />
Surface<br />
Layer<br />
Soil<br />
e , T<br />
gp<br />
g<br />
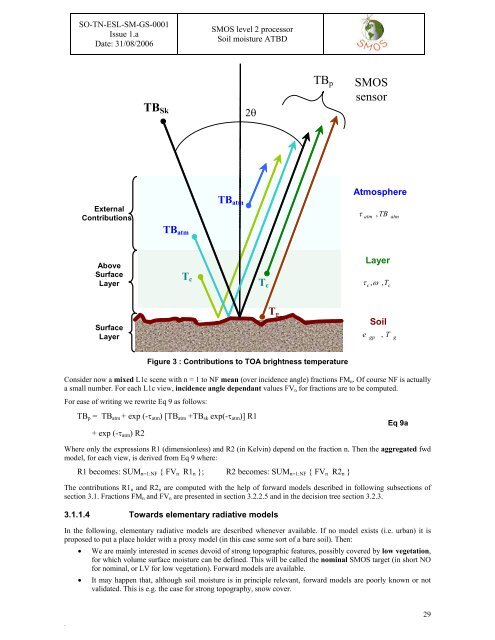
Figure 3 : Contributions to TOA brightness temperature<br />
Consider now a mixed L1c scene with n = 1 to NF mean (over incidence angle) fractions FM n . Of course NF is actually<br />
a small number. For each L1c view, incidence angle dependant values FV n for fractions are to be computed.<br />
For ease of writing we rewrite Eq 9 as follows:<br />
TB p = TB atm + exp (-τ atm ) [TB atm +TB sk exp(-τ atm )] R1<br />
Eq 9a<br />
+ exp (-τ atm ) R2<br />
Where only the expressions R1 (dimensionless) and R2 (in Kelvin) depend on the fraction n. Then the aggregated fwd<br />
model, for each view, is derived from Eq 9 where:<br />
R1 becomes: SUM n=1:NF { FV n R1 n }; R2 becomes: SUM n=1:NF { FV n R2 n }<br />
The contributions R1 n and R2 n are computed with the help of forward models described in following subsections of<br />
section 3.1. Fractions FM n and FV n are presented in section 3.2.2.5 and in the decision tree section 3.2.3.<br />
3.1.1.4 Towards elementary radiative models<br />
In the following, elementary radiative models are described whenever available. If no model exists (i.e. urban) it is<br />
proposed to put a place holder with a proxy model (in this case some sort of a bare soil). Then:<br />
• We are mainly interested in scenes devoid of strong topographic features, possibly covered by low vegetation,<br />
for which volume surface moisture can be defined. This will be called the nominal SMOS target (in short NO<br />
for nominal, or LV for low vegetation). Forward models are available.<br />
• It may happen that, although soil moisture is in principle relevant, forward models are poorly known or not<br />
validated. This is e.g. the case for strong topography, snow cover.<br />
.<br />
29