METROLOGY 101: PISTON PROVER DESIGN - Cal Lab Magazine
METROLOGY 101: PISTON PROVER DESIGN - Cal Lab Magazine
METROLOGY 101: PISTON PROVER DESIGN - Cal Lab Magazine

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
Metrology: Standardize and Automate!<br />
Mark Kuster<br />
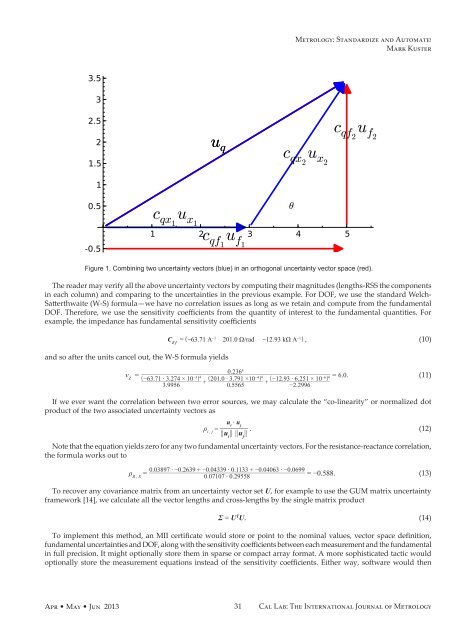
Figure 1. Combining two uncertainty vectors (blue) in an orthogonal uncertainty vector space (red).<br />
The reader may verify all the above uncertainty vectors by computing their magnitudes (lengths-RSS the components<br />
in each column) and comparing to the uncertainties in the previous example. For DOF, we use the standard Welch-<br />
Satterthwaite (W-S) formula—we have no correlation issues as long as we retain and compute from the fundamental<br />
DOF. Therefore, we use the sensitivity coefficients from the quantity of interest to the fundamental quantities. For<br />
example, the impedance has fundamental sensitivity coefficients<br />
and so after the units cancel out, the W-S formula yields<br />
C Z f<br />
= ( −63.71 A −1 201.0 Ω/rad −12.93 kΩ A −1 ), (10)<br />
___________________________________________________<br />
0.236<br />
v Z<br />
= <br />
4 <br />
____________________<br />
( −63.71 ∙ 3.274 × 10 −3 ) 4 __________________<br />
3.9956<br />
+ ( 201.0 ∙ 3.791 ×10−4 ) 4 <br />
0.5565<br />
+ ( −12.93 ∙ 6.251 × = 6.0. (11)<br />
____________________ 10−6 ) 4 <br />
−2.2996<br />
If we ever want the correlation between two error sources, we may calculate the “co-linearity” or normalized dot<br />
product of the two associated uncertainty vectors as<br />
u i<br />
∙ u j<br />
<br />
ρ i , j<br />
=<br />
________<br />
‖u i<br />
‖ ‖u j<br />
‖ . (12)<br />
Note that the equation yields zero for any two fundamental uncertainty vectors. For the resistance-reactance correlation,<br />
the formula works out to<br />
0.03897 ∙ −0.2639 + −0.04339 ∙ 0.1133 + −0.04063 ∙ −0.0699<br />
ρ R , X<br />
= ___________________________________________<br />
0.07107 ∙ 0.29558 = −0.588. (13)<br />
To recover any covariance matrix from an uncertainty vector set U, for example to use the GUM matrix uncertainty<br />
framework [14], we calculate all the vector lengths and cross-lengths by the single matrix product<br />
Σ = U T U. (14)<br />
To implement this method, an MII certificate would store or point to the nominal values, vector space definition,<br />
fundamental uncertainties and DOF, along with the sensitivity coefficients between each measurement and the fundamental<br />
in full precision. It might optionally store them in sparse or compact array format. A more sophisticated tactic would<br />
optionally store the measurement equations instead of the sensitivity coefficients. Either way, software would then<br />
Apr • May • Jun 2013<br />
31<br />
<strong>Cal</strong> <strong>Lab</strong>: The International Journal of Metrology