EPOS Application Note: CANopen Basic Information - Maxon Motor ag
EPOS Application Note: CANopen Basic Information - Maxon Motor ag
EPOS Application Note: CANopen Basic Information - Maxon Motor ag

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
<strong>EPOS</strong> Positioning Controller<br />
maxon motor control<br />
<strong>EPOS</strong> <strong>Application</strong> <strong>Note</strong>: <strong>CANopen</strong> <strong>Basic</strong> <strong>Information</strong><br />
Step 4:<br />
CAN<br />
Communication<br />
For the <strong>EPOS</strong> the following CAN bit rates are available:<br />
Object ‘CAN Bit rate’<br />
(Index 0x2001 Sub-Index 0x00)<br />
Bit rate<br />
Max. line length<br />
according to CiA DS-102<br />
0 1 MBit/s 25 m<br />
1 800 kBit/s 50 m<br />
2 500 kBit/s 100 m<br />
3 250 kBit/s 250 m<br />
4 125 kBit/s 500 m<br />
5 50 kBit/s 1000 m<br />
6 20 kBit/s 2500 m<br />
All devices on the CAN bus have to use the same bit rate! The maximum bit rate of a<br />
<strong>CANopen</strong> bus depends on the line length. Use the <strong>EPOS</strong> Studio to configure bit rate by<br />
writing the object ‘CAN Bit rate’ (Index 0x2001, Sub-Index 0x00) in the object dictionary.<br />
Step 5:<br />
Activate<br />
Changes<br />
Step 6:<br />
Communication<br />
Test<br />
Activate the changes by saving and resetting the <strong>EPOS</strong>.<br />
Execute first menu item ‘Save All Parameters’, then item ‘Reset Node’ in the context menu of<br />
the selected node in the <strong>EPOS</strong> Studio.<br />
Use a CAN monitor program (supported by manufacturer of PC or PLC CAN interface) to<br />
check the current wiring and <strong>EPOS</strong> configuration.<br />
1. Reset all <strong>EPOS</strong> devices on the bus.<br />
2. At power on the <strong>EPOS</strong> will send a boot up mess<strong>ag</strong>e.<br />
3. Check that all connected devices send a boot up mess<strong>ag</strong>e (otherwise the <strong>EPOS</strong><br />
produces a “CAN in Error Passive Mode”.<br />
4. Boot up mess<strong>ag</strong>e:<br />
COB-ID = 0x700 + Node-ID<br />
Data [0] = 0x00<br />
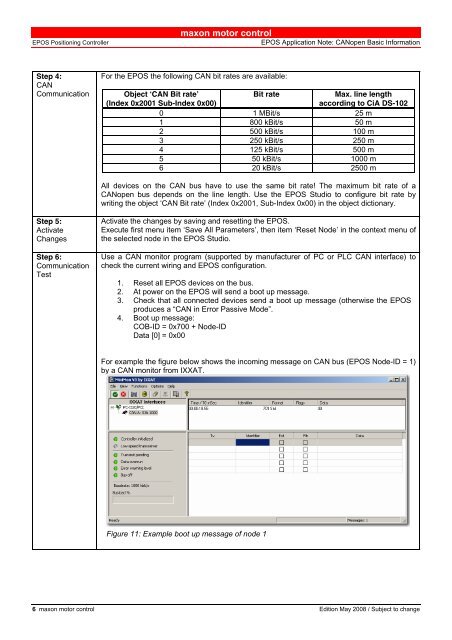
For example the figure below shows the incoming mess<strong>ag</strong>e on CAN bus (<strong>EPOS</strong> Node-ID = 1)<br />
by a CAN monitor from IXXAT.<br />
Figure 11: Example boot up mess<strong>ag</strong>e of node 1<br />
6 maxon motor control Edition May 2008 / Subject to change