
Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
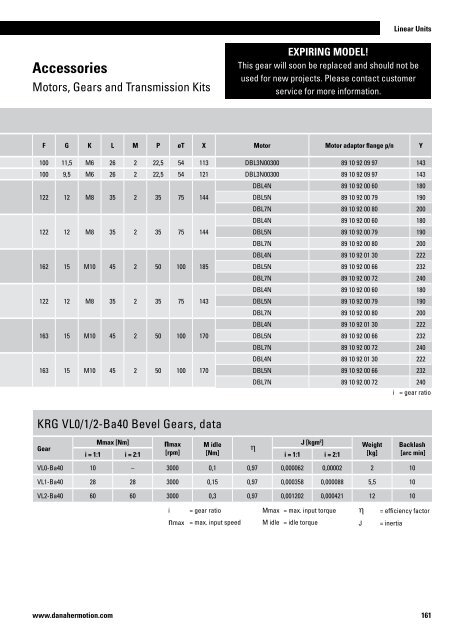
Accessories<br />
Motors, Gears and Transmission Kits<br />
www.danahermotion.com<br />
<strong>Linear</strong> <strong>Units</strong><br />
F G K L M P øT X Motor Motor adaptor flange p/n Y<br />
100 11,5 M6 26 2 22,5 54 113 DBL3N00300 89 10 92 09 97 143<br />
100 9,5 M6 26 2 22,5 54 121 DBL3N00300 89 10 92 09 97 143<br />
122 12 M8 35 2 35 75 144<br />
122 12 M8 35 2 35 75 144<br />
162 15 M10 45 2 50 100 185<br />
122 12 M8 35 2 35 75 143<br />
163 15 M10 45 2 50 100 170<br />
163 15 M10 45 2 50 100 170<br />
KRG VL0/1/2-Ba40 Bevel Gears, data<br />
Gear<br />
DBL4N 89 10 92 00 60 180<br />
DBL5N 89 10 92 00 79 190<br />
DBL7N 89 10 92 00 80 200<br />
DBL4N 89 10 92 00 60 180<br />
DBL5N 89 10 92 00 79 190<br />
DBL7N 89 10 92 00 80 200<br />
DBL4N 89 10 92 01 30 222<br />
DBL5N 89 10 92 00 66 232<br />
DBL7N 89 10 92 00 72 240<br />
DBL4N 89 10 92 00 60 180<br />
DBL5N 89 10 92 00 79 190<br />
DBL7N 89 10 92 00 80 200<br />
DBL4N 89 10 92 01 30 222<br />
DBL5N 89 10 92 00 66 232<br />
DBL7N 89 10 92 00 72 240<br />
DBL4N 89 10 92 01 30 222<br />
DBL5N 89 10 92 00 66 232<br />
DBL7N 89 10 92 00 72 240<br />
Mmax [Nm] nmax M idle<br />
J [kgm<br />
h<br />
[rpm] [Nm]<br />
2 ] Weight<br />
i = 1:1 i = 2:1 i = 1:1 i = 2:1 [kg]<br />
i = gear ratio<br />
VL0-Ba40 10 – 3000 0,1 0,97 0,000062 0,00002 2 10<br />
VL1-Ba40 28 28 3000 0,15 0,97 0,000358 0,000088 5,5 10<br />
VL2-Ba40 60 60 3000 0,3 0,97 0,001202 0,000421 12 10<br />
i = gear ratio<br />
nmax = max. input speed<br />
EXPIRING MODEL!<br />
This gear will soon be replaced and should not be<br />
used for new projects. Please contact customer<br />
service for more information.<br />
Mmax = max. input torque<br />
M idle = idle torque<br />
Backlash<br />
[arc min]<br />
h = efficiency factor<br />
J = inertia<br />
161