
You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
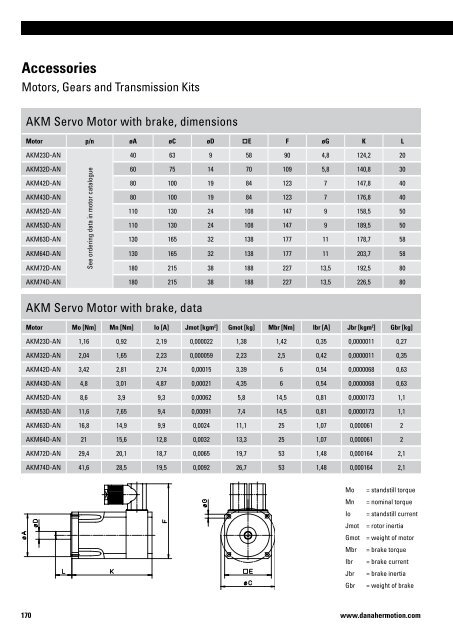
Accessories<br />
Motors, Gears and Transmission Kits<br />
AKM Servo Motor with brake, dimensions<br />
Motor p/n øA øC øD E F øG K L<br />
AKM23D-AN<br />
See ordering data in motor catalogue<br />
40 63 9 58 90 4,8 124,2 20<br />
AKM32D-AN 60 75 14 70 109 5,8 140,8 30<br />
AKM42D-AN 80 100 19 84 123 7 147,8 40<br />
AKM43D-AN 80 100 19 84 123 7 176,8 40<br />
AKM52D-AN 110 130 24 108 147 9 158,5 50<br />
AKM53D-AN 110 130 24 108 147 9 189,5 50<br />
AKM63D-AN 130 165 32 138 177 11 178,7 58<br />
AKM64D-AN 130 165 32 138 177 11 203,7 58<br />
AKM72D-AN 180 215 38 188 227 13,5 192,5 80<br />
AKM74D-AN 180 215 38 188 227 13,5 226,5 80<br />
AKM Servo Motor with brake, data<br />
Motor Mo [Nm] Mn [Nm] Io [A] Jmot [kgm 2 ] Gmot [kg] Mbr [Nm] Ibr [A] Jbr [kgm 2 ] Gbr [kg]<br />
AKM23D-AN 1,16 0,92 2,19 0,000022 1,38 1,42 0,35 0,0000011 0,27<br />
AKM32D-AN 2,04 1,65 2,23 0,000059 2,23 2,5 0,42 0,0000011 0,35<br />
AKM42D-AN 3,42 2,81 2,74 0,00015 3,39 6 0,54 0,0000068 0,63<br />
AKM43D-AN 4,8 3,01 4,87 0,00021 4,35 6 0,54 0,0000068 0,63<br />
AKM52D-AN 8,6 3,9 9,3 0,00062 5,8 14,5 0,81 0,0000173 1,1<br />
AKM53D-AN 11,6 7,65 9,4 0,00091 7,4 14,5 0,81 0,0000173 1,1<br />
AKM63D-AN 16,8 14,9 9,9 0,0024 11,1 25 1,07 0,000061 2<br />
AKM64D-AN 21 15,6 12,8 0,0032 13,3 25 1,07 0,000061 2<br />
AKM72D-AN 29,4 20,1 18,7 0,0065 19,7 53 1,48 0,000164 2,1<br />
AKM74D-AN 41,6 28,5 19,5 0,0092 26,7 53 1,48 0,000164 2,1<br />
Mo = standstill torque<br />
Mn = nominal torque<br />
Io = standstill current<br />
Jmot = rotor inertia<br />
Gmot = weight of motor<br />
Mbr = brake torque<br />
Ibr = brake current<br />
Jbr = brake inertia<br />
Gbr = weight of brake<br />
170 www.danahermotion.com