


Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
Session A2 Paper 1018<br />
<strong>CONTROL</strong> <strong>SYSTEMS</strong> <strong>IN</strong> <strong>MODERN</strong> <strong>ROBOTICS</strong><br />
Derek Ebersole (dle13@pitt.edu) and Ben Guise (bag44@pitt.edu)<br />
Abstract – This paper will focus on the control systems used<br />
in mobile robotics, possessing an emphasis on controlling<br />
their stabilization. This paper will touch base on possible<br />
improvements of control systems from an engineer’s<br />
standpoint.<br />
We will initially start with the basics of enabling robots<br />
with ―brains‖ through the applications of control systems.<br />
After dissecting control systems, we will discuss how sensors<br />
help robots get information to make decisions. Once control<br />
systems and sensors are fully conveyed to the audience, we<br />
will then look at an example of advanced control systems<br />
such as BigDog: Boston Dynamic’s robot, which can<br />
maneuver itself over various terrains without tumbling over.<br />
Much of what interests us is the ability for new robots to<br />
detect an imbalance in their weight and make the necessary<br />
adjustments to withhold from falling. Through the<br />
application of BigDog, the significance of the continued<br />
research in the field will be justified.<br />
Key Words – Control Systems, Data Processing, Robotics,<br />
Sensors, Stabilization, Legged Robotics<br />
EARLY <strong>ROBOTICS</strong>: THE UNREALIZED DREAM<br />
In late 2001, the research necessary for creating a fully<br />
mobile intelligent robot was declared complete, and the<br />
fictional dreams of movies, such as the Star Wars series or<br />
The Terminator series, seemed to become possibilities. But<br />
since this time, mobile robots have stayed confined to the<br />
home. Robot vacuum cleaners, such as Electrolux’s<br />
Trilobite, possess various sensors and control systems to<br />
navigate around a room, keeping track of the path taken<br />
without bumping into anything, while cleaning every<br />
particle of dust. Similarly, Friendly Robotics’ Robomower<br />
traverses a yard without hitting any obstructions while<br />
evenly cutting grass to the owner’s specification [1].<br />
While each of these examples possesses the basic form an<br />
intelligent mobile robot should have, the potential of this<br />
technology seems to be poorly utilized. In many cases, users<br />
note the inconsistent cleaning path and the unreliability these<br />
mobile cleaners possess. Aside from problems in design,<br />
these robots fail to live up to the expectation of what an<br />
intelligent robot should be. We still have no Terminator or<br />
C3PO like in Star Wars: machines that are capable of<br />
automatically determining the terrain they are traversing and<br />
acting appropriately. Therefore, the research in the field of<br />
robotics is not complete; otherwise the world would have<br />
seen the applications we have been fantasizing about.<br />
We have failed in reaching the science-fiction dream.<br />
Mobile robots need to be able to detect data with speed and<br />
precision, as well as balance themselves while traveling over<br />
treacherous terrain. Without these abilities and proper<br />
control systems to input and output data, robots will never<br />
reach the goal set forth in most science fiction films.<br />
THE <strong>CONTROL</strong> SYSTEM<br />
Types of Control Systems<br />
Analog systems were the first sign of what we call a control<br />
system. Each of these very basic systems exports only<br />
analog signals, generated outputs by another dynamic<br />
system (such as equipment or a signal generator). The<br />
information of the system is taken in and outputted. There is<br />
no computer making decisions off of this data, simply<br />
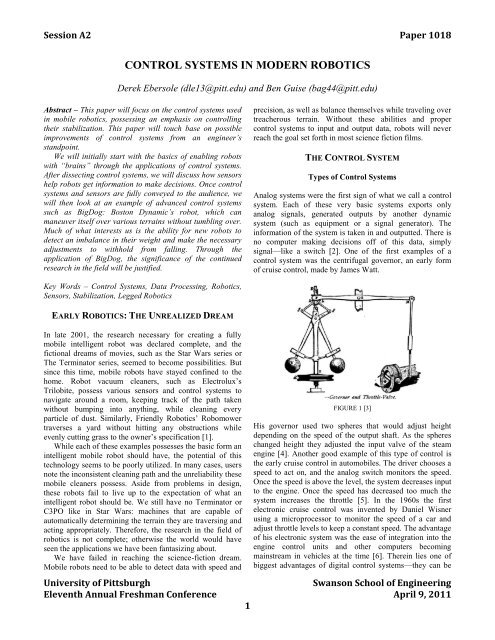
signal—like a switch [2]. One of the first examples of a<br />
control system was the centrifugal governor, an early form<br />
of cruise control, made by James Watt.<br />
FIGURE 1 [3]<br />
His governor used two spheres that would adjust height<br />
depending on the speed of the output shaft. As the spheres<br />
changed height they adjusted the input valve of the steam<br />
engine [4]. Another good example of this type of control is<br />
the early cruise control in automobiles. The driver chooses a<br />
speed to act on, and the analog switch monitors the speed.<br />
Once the speed is above the level, the system decreases input<br />
to the engine. Once the speed has decreased too much the<br />
system increases the throttle [5]. In the 1960s the first<br />
electronic cruise control was invented by Daniel Wisner<br />
using a microprocessor to monitor the speed of a car and<br />
adjust throttle levels to keep a constant speed. The advantage<br />
of his electronic system was the ease of integration into the<br />
engine control units and other computers becoming<br />
mainstream in vehicles at the time [6]. Therein lies one of<br />
biggest advantages of digital control systems—they can be<br />
University of Pittsburgh Swanson School of Engineering<br />
Eleventh Annual Freshman Conference April 9, 2011<br />
1
integrated into other systems and share data, therefore<br />
making devices more reliable, safer, and often more<br />
accurate.<br />
The next step in the complex line of control systems is<br />
the sampled-data system. Here, analog signals, sampled data,<br />
and pulse-modulated signals are put together and used<br />
simultaneously. An advantage to this is the sharing ability<br />
between equipment and signals [2].<br />
The most popular of these types is the digital system,<br />
which houses the ability to use analog signals, sampled data,<br />
and digital data. This code represents values in sequences,<br />
which help determine the actual value of digital information.<br />
Computers compare data and actually “think” about what the<br />
best adjustment is for the system. When more complicated<br />
control must be utilized, the digital direction is the obvious<br />
choice, as it can keep track of a lot of data and give<br />
calculated outputs based on logic switches [2]. A good<br />
example is automatic flight control in airplanes. The system<br />
must take into account a wide variety of data, such as lateral<br />
height, vertical height, and various forms of disturbances. To<br />
account for these, the main control system is a digital<br />
computer that acquires data from three independent systems<br />
monitoring these values. This proves the luxury that a digital<br />
system offers, as it can read many varieties of information at<br />
once and make smart choices based off of them [7].<br />
Control System Thought Process<br />
All control systems work on the same basic principle: they<br />
monitor output of a system and alter input to keep output<br />
consistent. Figure 2 illustrates the thought process behind<br />
how these systems go about analyzing information. An<br />
important factor is that this chart is a loop, which means the<br />
outputs and inputs are continuously monitored. In analog<br />
systems this is represented by mechanical or electrical<br />
signals and for digital systems a computer is preset to<br />
monitor this information at a given rate. The faster this<br />
monitoring process is performed, the more precise and<br />
accurate the output adjustments are for the system [8].<br />
FIGURE 2 [2]<br />
A necessary ability control systems must have is quick,<br />
logical reaction to unusual data. An engineer designs a<br />
system to be efficient and safe. Safety is important, and if a<br />
dangerous machine needs to be stopped, the control must<br />
react quickly and accurately. Consider a robot lawnmower<br />
once more. If the machine for some reason turns over, the<br />
Paper 1018<br />
blades would need to shut down, otherwise someone could<br />
get hurt. A control system in this scenario would need to be<br />
told to shut down all systems, otherwise the mower would be<br />
deemed unsafe for the public.<br />
SENSORS: ACQUIR<strong>IN</strong>G DATA<br />
The first step in a control system is to input data from the<br />
system. Sensors allow robots and control systems to see<br />
what is happening in the environment around them. A<br />
variety of sensors are available for different types of<br />
functions including movement, vision, balance and scientific<br />
data collection. What is relevant for control systems<br />
handling locomotion are sensors that deal with the first three<br />
functions of the list [9].<br />
Early robots used pegs at fixed points to stop movement.<br />
This proved inefficient over time as more technical and agile<br />
robots were made, and servo motors were implemented.<br />
Servo motors handle movement while also providing<br />
feedback. These motors read an encoder disk that has slits at<br />
defined points, as shown in Figure 3. Light sensors see when<br />
these points pass by and the time increment information<br />
gathered tells the motor how far it has turned. The robot is<br />
therefore able to detect the distance a leg or arm has moved,<br />
send this information to the control system, and make a<br />
decision to continue or stop motion [9][2]. Encoder disks are<br />
sometimes used alone as a means to find the angle of<br />
rotation in a system. In both applications, the more slits that<br />
are present in the disk, the more accurate the measurements<br />
are for the angles. An important note here is that in order for<br />
a robot to determine the change in angle, it must first know<br />
the number of slits present in the disk, otherwise calculations<br />
will be incorrect [10].<br />
FIGURE 3 [10]<br />
Potentiometers can also be used for sensing joint<br />
displacements. A potentiometer functions by comparing an<br />
output voltage to an input voltage. These devices incorporate<br />
a resistive track made out of carbon film, conductive<br />
ceramic, or wound wire. The distance through this track that<br />
the electricity must travel is changed by the physical location<br />
of a wiper that slides across the track. This change in<br />
distance causes a voltage change. Potentiometers are usually<br />
used as volume controls in stereos and can measure a change<br />
in angle caused by something rotating. Linear<br />
potentiometers also exist, which track a distance by moving<br />
University of Pittsburgh Swanson School of Engineering<br />
Eleventh Annual Freshman Conference April 9, 2011<br />
2
a wiper over a straight track rather than around a circle<br />
[2][10].<br />
FIGURE 4 [10]<br />
Radial potentiometer<br />
FIGURE 5 [10]<br />
Linear potentiometer<br />
Gyroscopes, both mechanical and electrical, are used to<br />
determine if an object is balanced. Early examples include<br />
the Sperry autopilot, which use gyroscopes to handle the<br />
horizontal and vertical pitch of an airplane, enabling the<br />
pilot to walk safely across the wings without manually<br />
adjusting the pitch of the airplane [5]. Newer electronic<br />
gyroscopes are used in commercial products like the Apple<br />
iPhone to output the orientation of the device [11].<br />
These gyroscope sensors are applications of Newton’s<br />
second law for rotation, which states that net torque equals<br />
angular acceleration multiplied by the moment of inertia.<br />
= Ι<br />
EQUATION 1<br />
A disk spun about a frictionless axis is suspended in a<br />
gimbal or a cage, which will retain its orientation. Because<br />
this gimbal is mounted freely in a rigid body, one can<br />
measure the angle between the gimbal and the moved body<br />
to find the pitch or roll of the object being stabilized [2].<br />
Often robots require force sensors for grasping objects or<br />
for determining the weight of an object. This information is<br />
useful for finding the amount of weight supported by each<br />
leg of a robot. Load cells are used to determine the<br />
magnitude of force. These are made with a dielectric<br />
material between two plates. As a force acts on this system,<br />
the distance between the plates increases or decreases,<br />
inversely changing the capacitance [10].<br />
C =<br />
EQUATION 2<br />
Paper 1018<br />
These sensors become especially important for robots with<br />
legs or arms, as this allows the robot to see how much<br />
weight is being supported by each arm or leg and react<br />
according to weight shifts or imbalances.<br />
Vision sensors come in a variety of types from simple<br />
light detectors to cameras. Basic light detectors differentiate<br />
between light and dark; images and color are not sensed.<br />
These are often used with the aforementioned coding disks<br />
or for simple light detection. More complex image sensors<br />
can produce a black and white image, which can then be<br />
passed on to a computer for data analysis. The most<br />
important area for complex vision is the sensor placement<br />
and data processing rather than the types of sensors used<br />
[5][10].<br />
The topic of robot vision is complicated because, while it<br />
is easy to input visual data, interpreting it for actual use is<br />
difficult and requires software. In humans, the retina<br />
converts light into electrochemical energy, which is then<br />
sent to the brain for processing. In robots a common vision<br />
sensor used today is a charge-coupled device, or CCD<br />
camera. These are ideal for robots because they are<br />
lightweight and small, consume little electricity, and have a<br />
high sensitivity over the light spectrum. A CCD array is<br />
made using an array of metal oxide semiconductor fieldeffect<br />
transistors, or MOSFETs, as seen in Figure 6.<br />
FIGURE 6 [12]<br />
MOSFET array<br />
The basic idea behind this type of vision sensor is that an<br />
array of MOSFETs stores a series of charges that correspond<br />
to the light intensity at that point. Positive semiconductor<br />
nodes are placed in a negative substrate. A depletion region<br />
separates each positive node, and then the entire array is<br />
covered in silicon dioxide. Light photons hitting the<br />
depletion region free electrons, which create a net positive<br />
University of Pittsburgh Swanson School of Engineering<br />
Eleventh Annual Freshman Conference April 9, 2011<br />
3
charge. Each individual charge is transferred the next cell by<br />
a clock pulse. This electrical signal then comprises the video<br />
signal [12].<br />
Stereo vision, which is being employed by more robots,<br />
is useful because it allows for the possibility of two and<br />
three dimensional vision. By comparing the picture output<br />
by two cameras, it is possible to see depth and further<br />
analyze the environment [10]. However, a large part of what<br />
makes robot vision work is the software behind it. Any robot<br />
can input a picture of a tree, but it takes software<br />
programming for the robot to know what a tree really is.<br />
With all of these sensors inputting much information into<br />
the control system, one could argue that robots should easily<br />
have human like abilities in balancing, motion, and vision.<br />
One can give a control system all kinds of information but<br />
without a fast computer to interpret this information, this<br />
data is rendered useless. Furthermore, advanced software is<br />
required to enable a computer to handle these functions and<br />
correctly process input.<br />
<strong>CONTROL</strong> <strong>SYSTEMS</strong> <strong>IN</strong> OUTER SPACE<br />
Imagine a bullet fired from a gun in outer space. This bullet<br />
will continue traveling in the same direction until it enters a<br />
gravitational field from other masses. Now add a small<br />
control system whose goal is to keep it on its initial path. It<br />
detects motion traveling away from the path and fixes it.<br />
These fixes are done every now and then, but there is not<br />
necessarily a continual need for them.<br />
In outer space, once you let it go, it must fix itself; there<br />
is no more human directional interaction. There is an<br />
element of simplicity and an element of complexity in this.<br />
The National Aeronautics and Space Association (NASA)<br />
has dealt with these issues for years. Voyagers 1 and 2 are<br />
examples of NASA engineering at its finest, given that they<br />
have been operational for thirty-four years without any<br />
serious human interventions or breakdowns. Both of these<br />
probes are on a path to interstellar space and have very<br />
infrequent path corrections because in space, once an object<br />
begins to move in a certain direction, it will continue on that<br />
path almost infinitely. When corrections are necessary, there<br />
is usually enough time to perform calculations to fix the<br />
problem; mainly because the potential threats are detected<br />
long before they are encountered. All of this means that<br />
space probes require little computational power to operate.<br />
The Voyager probes use three different computers, each<br />
with a redundant pair, for a total of six computers in each<br />
probe. The total memory for all of these computers is about<br />
sixty-eight kilobytes, which is much less than a common<br />
flash drive or even a standard three and a half inch floppy<br />
disk [13][14]. A more recent example is Sojourner, a Mars<br />
rover utilizing a 100-kilohertz Intel 80C85 processor with<br />
512 kilobytes of memory, which was first produced in 1977<br />
[15]. Clearly, this is not a very powerful computer. Because<br />
Sojourner moves with six wheels, a very simple system, it<br />
Paper 1018<br />
does not need a complex computer. This illustrates an<br />
important factor in the continued development of robotics—<br />
robots with complex motion systems must be able to<br />
perform calculations to adjust movement in varying terrains<br />
using smaller, more powerful computers so that outside<br />
computing is not necessary, as this would increase the size<br />
and response time of a robot.<br />
FIGURE 7 [14]<br />
Depiction of the Voyager space probe<br />
These space-bound computers are not capable of massive<br />
amounts of data processing. However, any serious<br />
calculations could be performed on Earth and beamed up to<br />
the satellites given that we would have advance notice of a<br />
probe headed towards a large planet or other celestial body.<br />
One of the problems with this is the time necessary for<br />
transmission. A signal traveling to or from Voyager 2<br />
currently takes about thirteen hours to transmit one way<br />
[16]. This means that NASA cannot intervene quickly if<br />
something goes wrong; therefore, probes must be selfsufficient<br />
to a degree and very reliable (as the Voyager<br />
probes have proven to be over their thirty-four year<br />
missions). The problem of communication latency was<br />
especially frustrating in the recent incident with Voyager 2,<br />
where a single flip of a bit in memory from a zero to a one<br />
corrupted data being sent back to Earth. Because of this, it<br />
took NASA engineers weeks to diagnose and fix the<br />
problem [17]. Thanks to redundant computers and alternate<br />
operation modes, the spacecraft was able to continue<br />
operating through this situation. This shows that control<br />
systems and computers used in space probes and<br />
autonomous robots alike need to be reliable and powerful<br />
enough—whether that power comes through software or<br />
hardware—to handle even the most catastrophic system<br />
failures or unexpected circumstances. Furthermore, space<br />
probes and vehicles have been an area where low power,<br />
small form factor, and high reliability computers—an almost<br />
ideal combination for robotics—have been implemented for<br />
decades.<br />
University of Pittsburgh Swanson School of Engineering<br />
Eleventh Annual Freshman Conference April 9, 2011<br />
4
STABILIZATION ON EARTH<br />
Gravitational Woes<br />
Outer space is a unique environment to work in, as there is<br />
no gravity. On Earth, what goes up must come down.<br />
Therefore, continuous fixing of direction is needed, as we<br />
are constantly fighting a force keeping us from hovering<br />
above ground. Imagine, once again, the bullet situation, only<br />
this time shot from a gun parallel to the ground. Even though<br />
this bullet is travelling at an immense speed, it is being<br />
pulled downward, and will hit the ground. Now imagine a<br />
tiny control system with rockets directed opposite gravity.<br />
When it detects a fall in height, the rockets push the bullet<br />
upwards and then let off once the original height is reached<br />
again, so that the bullet stays in a straight line. The<br />
difference between these bullet scenarios is an example of<br />
the continuous re-fixing that needs to be done on Earth.<br />
Gravity forces a repositioning of the system at almost a<br />
constant rate, meaning its control system needs to be fast<br />
enough to process the data and act quickly. Achieving<br />
mobility in robots is consequently made much more<br />
difficult, as robot body parts must be constantly adjusted to<br />
keep from falling to the ground, especially on ice or a<br />
crumbling hill [18].<br />
Benefits of Robots with Legs<br />
What makes the gravity problem even more difficult is the<br />
necessity for legged robots rather than treaded or wheeled<br />
ones. Early robots moved on treads, which are successful in<br />
simple motion, but fail on steep hills and blunt objects, such<br />
as dragon’s teeth, shown in Figure 8. Robots with legs have<br />
proven to be more mobile, as their abilities to move are far<br />
more enhanced. Legs offer an active suspension, allowing<br />
the center of mass to shift around to handle various<br />
movements of the robot. A good example of this is a car<br />
with wheels. Cars will travel very quickly on a paved road,<br />
however in even slightly rough and unstable terrain vehicles<br />
with treads such as tanks are more agile. But given a steep<br />
cliff or constantly changing terrain such as a field of bricks<br />
in the aftermath of an earthquake a legged vehicle has the<br />
advantage because it can step over obstacles, jump, and even<br />
climb over changing terrain. A mountain goat can maneuver<br />
in a rocky environment with large boulders, but a tank or a<br />
car would be rendered useless. This complex system means<br />
that stabilizing the robot is much more difficult [18].<br />
Paper 1018<br />
FIGURE 8 [19]<br />
Dragon’s Teeth—a defense structure used in World War II to stop tanks<br />
Animals have many attributes enabling them to balance<br />
themselves when standing, walking, or running, and these<br />
are characteristics that would enhance a robot greatly.<br />
Important things to note about animals are their symmetric<br />
body, their flexible limbs, and their coordination. Applying<br />
these skills to a robot is quite difficult, but the better it is<br />
done, the more stable and agile a robot can be. Symmetry<br />
does not only apply to standing, but also to walking and<br />
running. Flexibility does not simply mean stretching and<br />
shrinking, but also twisting and bending. Coordination<br />
between legs when walking and running is one of the most<br />
important factors, and keeping these things synchronized in<br />
robotics requires much more work than a robot with treads<br />
would [18].<br />
Therefore, legs are inherently more complicated than<br />
wheels because the movements of a leg are extremely<br />
complex, as a wheel simply turns. As an example, wheel<br />
movement can be measured with an encoding disk, as<br />
mentioned before, while a leg requires force and traction<br />
sensors. Mass amounts of calculation need to be done, and<br />
an extremely fast control system is necessary to keep the<br />
robot from collapsing.<br />
THE COMPUTER’S POWER<br />
Initially, computers were too slow to be used as robot<br />
controllers. But once electrical and computer engineers<br />
switched from vacuum tubes to transistors, computers began<br />
to become small and powerful enough to function as robot<br />
controllers [9]. As we have recently seen on “Jeopardy!,”<br />
computers are now powerful enough to answer questions in<br />
under three seconds. International Business Machines, or<br />
IBM, created the supercomputer named Watson for this task.<br />
It was built using ninety IBM Power 750 servers with a total<br />
of sixteen terabytes of memory and 2,880 processor cores.<br />
This immense computing power is necessary for Watson to<br />
University of Pittsburgh Swanson School of Engineering<br />
Eleventh Annual Freshman Conference April 9, 2011<br />
5
achieve its three-second-answer time for every “Jeopardy!”<br />
question. If Watson were to use one processor, it would take<br />
about two hours for it to answer just one question. What<br />
allows Watson to achieve this speed is a combination of<br />
hardware and software. IBM used the Apache Unstructured<br />
Information Management Architecture to sort through the<br />
large amount of information that Watson has stored on its<br />
hard drive. This architecture allows Watson to spread the<br />
processing load across all 2,880 of its processor cores at<br />
once.<br />
Watson has proven that a computer is able to interpret<br />
text and use data that it already knows to answer a question<br />
given the right hardware and software, which is great for<br />
business and computing applications. This is also promising<br />
for the field of robotics in that robots could benefit from the<br />
ability to process this much data all at once and to interpret<br />
visual commands and search an internal database to<br />
determine the best course of action. One way to make robots<br />
more capable is to enable them to make decisions on how to<br />
use their hardware based on the task at hand. For example,<br />
traversing over snow, ice, mud, and sand all require different<br />
movement techniques and if a robot were to move through<br />
this terrain without compensating for the instability of snow<br />
or the slickness of ice, it could get stuck or fall and become<br />
damaged.<br />
While Watson is a good example of computing methods<br />
for rapidly inputting information and finding the best<br />
solution, the fact that it takes up over 180 cubic feet and<br />
consumes as much power as a laundromat makes computer<br />
processing at this scale impossible for mobile robots. Ideally<br />
the parallel processing power and statistical analysis of<br />
Watson would be combined with the size, power<br />
requirement, and reliability of Voyager’s computers.<br />
Nonetheless, lessons such as building computers for a<br />
specific purpose and using distributed computing could be<br />
applied at a smaller scale, making robots more autonomous<br />
[20].<br />
THE PERFECT EXAMPLE: BIGDOG<br />
What is BigDog?<br />
Finally, after discussing control systems, sensors to give<br />
them information, and the benefit of further engineering<br />
research in the speed of computers, we come to a vital<br />
example that exhibits all of these: BigDog. Released in<br />
2008, BigDog is Boston Dynamics’ four-legged robot. The<br />
BigDog project’s goal is to create a robot that can travel<br />
anywhere an animal or human can go. BigDog’s control<br />
system must balance, navigate, and regulate all forms of<br />
movement. Three areas were emphasized in the area of<br />
control: supporting the body through bouncing, controlling<br />
attitude of the body with torques, and key placement of feet<br />
to keep the body symmetric. By utilizing this state of the art<br />
technology with a complex quadruped, BigDog exemplifies<br />
Paper 1018<br />
the correct direction in which intelligent robotics research<br />
should be going [21].<br />
FIGURE 9 [22]<br />
BigDog’s Sensing Ability<br />
BigDog has the ability to sense its surroundings and react to<br />
them in order to keep from falling. It also has the ability to<br />
detect future movements, such as good foot placement.<br />
When a human walks over ice, they do so carefully, looking<br />
for good footing while not shifting too much weight onto a<br />
foot. A robot can hardly know exactly where to place a foot,<br />
and therefore the ability to foresee future movements are<br />
vital.<br />
BigDog has been equipped with close to seventy sensors.<br />
About fifty of these sensors are located on the hips, knees,<br />
ankles, and legs, measuring aspects such as joint<br />
dislocations, force approximations, and servo current.<br />
Without these necessary sensors, BigDog would collapse<br />
when traversing even the easiest terrain. Aside from leg<br />
sensors, six others are gyroscopes used to measure the<br />
body's balance, while three more are used for vision<br />
approximations, such as avoiding obstacles, measuring the<br />
ground slope, or finding patterns in the motion of the<br />
surroundings [22].<br />
BigDog has been proven to have good stability, even<br />
when walking across ice or up an unstable hill. These<br />
sensors are a large portion of the reason why the machine is<br />
so successful, as the data sent to the control system must be<br />
accurate. But, even with an extreme amount of information,<br />
if the computer cannot process and make decisions quickly,<br />
the machine as a whole will still fail.<br />
BigDog’s Stabilization<br />
As previously stated, a legged robot can travel on more<br />
difficult terrain than a treaded one due to its ability to<br />
compensate for small mounds or ditches, but the difficulty of<br />
balancing these robots is great. BigDog's torso weighs about<br />
University of Pittsburgh Swanson School of Engineering<br />
Eleventh Annual Freshman Conference April 9, 2011<br />
6
100 pounds and is able to carry over 300 pounds, meaning<br />
that each leg must do a lot of work to hold it up, especially<br />
when the body is majorly off balance and certain legs are<br />
given much more weight to hold. In order for these things to<br />
happen, symmetry, coordination, and flexibility must be<br />
utilized so that BigDog does not plummet to the ground [21].<br />
BigDog's legs are syncronized in movement. The<br />
machine is extremely symmetrical, taking the form of an<br />
actual dog: If one of the legs were made slightly different<br />
than the rest, the machine would be inherently off balance<br />
and the model would fail. When fixing its balance, the legs<br />
move at the same time so that any lapse in weight being held<br />
is alleviated. As BigDog stumbles, it knows to lower its<br />
body onto its knees simultaneously, lowering the center of<br />
mass and regaining stability, before lifting up again once<br />
balance is achieved. Since the legs act like the limbs of an<br />
animal with numerous amounts of joints, these legs are able<br />
to reach wherever they need to in order to provide good<br />
footing when balance begins to fail.<br />
Each of these abilities is only possible through the<br />
computer's power. Without ample speed for the control<br />
system to decide to tell the legs to bend down on the knees<br />
after processing data indicating the need to do so, correction<br />
would not happen, and BigDog would fall. Therefore, the<br />
most important part of the machine is the control system, as<br />
it must tell which body parts to move after retrieving,<br />
deciding, and reacting at extremely fast rates based on data<br />
[21]. This illustrates the importance of further engineering in<br />
the control system field, making their thought process faster<br />
and more reliable to make machines more capable.<br />
BigDog’s Control System<br />
BigDog's control system exemplifies the reasons why<br />
improvements in control systems are needed. Through all of<br />
the analysis that has been covered on sensors and stability,<br />
the control system has an important job in legged robots.<br />
BigDog's onboard computer is small and must perform<br />
control, sensing, data collection, communications, and the<br />
electric power distribution. Put together, BigDog's control<br />
system must basically do two things: coordinate kinematics<br />
to ground movement processed while correcting instability<br />
[21].<br />
The system uses sensors from the joints to determine the<br />
amount of load each foot should have with each and every<br />
step. Posture is controlled by relating the kinematics of each<br />
leg to the forces of the legs in contact with the ground. With<br />
kinematics in relation to ground forces, BigDog's control<br />
system can regulate body roll, pitch, and its height above<br />
ground, which allows BigDog to adapt to variations in<br />
terrain [21].<br />
BigDog tackles steep terrain by utilizing the ability just<br />
explained. When the path gets steeper, the control system<br />
leans the body forward to account for an off-based center of<br />
mass, as well as leaning back when the path steepens<br />
Paper 1018<br />
downward. More impressively, as BigDog runs along the<br />
side of a hill, the control leans the body towards the hill,<br />
minimizing the torque on the bottom legs, keeping the body<br />
more stable [21]. The ability to shift weight front to back<br />
and side to side proves the necessity of legged robots, as a<br />
treaded one would fall due to its off balance center of mass<br />
on steep slopes.<br />
All of this is just one step of a four step process. First the<br />
control system must retrieve data from the sensors, then<br />
process the data, make a decision of action, and finally tell<br />
BigDog's parts what to do. If this process is not performed<br />
fast enough, BigDog falls. On top of all of this, the control<br />
system must do this over and over again, as it is constantly<br />
fighting gravity and occasionally dealing with unstable<br />
terrain. What is truly remarkable about BigDog is how fast it<br />
can repeat this process. BigDog's sensors gather information<br />
about 1,000 times every second, and the control system<br />
performs this four step process about 200 times every<br />
second. The engineering behind the control has sped up the<br />
system’s ability to correct itself, which is ultimately the<br />
reason for BigDog's success in not falling [22].<br />
A SUSTA<strong>IN</strong>ABLE SYSTEM<br />
Sustainability in a broader sense can be environmental in<br />
regards to conservation or it can involve changing the<br />
environment in a beneficial way. Robots such as BigDog are<br />
showing their value in this latter definition. Through<br />
application of advanced sensors, computer hardware and<br />
software, robots such as iRobot’s Roomba and Segway’s<br />
line of vehicles have come to fruition. The Roomba can<br />
clean houses without any more input than turning it on. This<br />
means that it can vacuum floors, giving its owner the time<br />
for other tasks. This saved time means not only a more open<br />
schedule for humans but also a cleaner living space since a<br />
Roomba can clean more frequently than a human with a<br />
vacuum could on his or her own.<br />
Also improving the human condition are Segway’s<br />
products, which allow people to travel through buildings,<br />
cities, and even nature trails with little effort. The creators of<br />
BigDog hope that it will benefit humans in a similar manner<br />
by carrying equipment through varying and difficult terrain<br />
that wheeled and treaded robots could not handle. Without<br />
the added mobility and stability enabled by the sophisticated<br />
control systems and computers, BigDog could not handle<br />
snow, steep terrain, and elevation changes present in rubble<br />
and rocks as easily as it does. Boston Dynamics has already<br />
proposed that BigDog would be useful for soldiers who<br />
often have hundreds of pounds of supplies and equipment to<br />
carry.<br />
Computers utilizing smaller, faster control systems can<br />
also make buildings more efficient, improving conditions for<br />
their occupants while also reducing unnecessary energy<br />
usage. Control systems define how economically efficient a<br />
process is, as it controls what is turned on and what is turned<br />
University of Pittsburgh Swanson School of Engineering<br />
Eleventh Annual Freshman Conference April 9, 2011<br />
7
off. Companies have switched to a digital control system,<br />
giving them the ability to control multiple processes at the<br />
same time. These central computers provide companies with<br />
the ability to utilize more than one factor in computation<br />
than just one like an older system. Aspects such as heating<br />
and cooling systems, ventilation systems, lighting, etc. can<br />
all be constantly monitored to find the most economical<br />
setting that the company is looking for. By implementing<br />
faster control in smaller spaces, multiple apparatuses do not<br />
have to be implemented into control processes, saving<br />
energy [23].<br />
The faster these control systems are, the more complex<br />
information these systems can have. Their ability to<br />
determine the most efficient solution at a fast pace to<br />
problems given will save time, money and resourses. This<br />
will also help to reduce the large amount of waste disposal<br />
some manufacturing processes posses [23]. Improving the<br />
speed of control will improve human life and save mass<br />
amounts of energy.<br />
Control systems have allowed for reduced waste and<br />
resources in manufacturing processes and thermal control in<br />
buildings, but the control systems themselves are also<br />
representing a reduction in waste. Figure 2 illustrates one of<br />
the first control systems used for controlling an engine’s<br />
speed, which was replaced by a small computer chip.<br />
Changes such as this from analog to digital have made<br />
products more environmentally friendly as they use less<br />
material for their internal systems. This is an oftenoverlooked<br />
benefit of these modern control systems.<br />
POSSIBILITIES FOR THE FUTURE<br />
The control system is an extremely powerful device, giving<br />
users the ability to manipulate robots and make them do<br />
what they want. Through the addition of advanced sensors<br />
giving control systems vital information for making<br />
decisions, robots are able to have legs. With legs, robots like<br />
BigDog have much greater mobility than any robot we have<br />
ever seen before, traveling up slopes, over ice, and through<br />
tough terrain. These advanced sensors and appendages<br />
combined with more powerful computer hardware and<br />
software will make robots of the future more capable,<br />
reliable, and autonomous than ever. Robots like BigDog<br />
show that we are close to having mobile robots that can<br />
handle some of the toughest terrain and recover from slips<br />
and falls without any human intervention, indicating how<br />
close we are to achieving the ultimate science fiction goal:<br />
having a C3PO or iRobot that is capable of inputting<br />
environment data and acting accordingly.<br />
REFERENCES<br />
[1] J. Fulcher L. C. Jain. (2004). Applied Intelligent Systems. Berlin,<br />
Germany: Springer-Verlag.<br />
Paper 1018<br />
[2] C. W. deSilva. (1989). Control Sensors and Actuators. Englewood<br />
Cliffs, NJ: Prentice Hall.<br />
[3]http://upload.wikimedia.org/wikipedia/commons/1/1e/Centrifugal_gover<br />
nor.png<br />
[4] J. Maxwell. (1868). “On Governors”. Proceedings of the Royal Society.<br />
No. 100 p. 1.<br />
[5] K. J. Astrom and R. M. Murray. (2008). Feedback Systems. Princeton,<br />
NJ: Princeton University Press.<br />
[6] Patent: Wisner, D. A. (1968). U.S. Patent No. 3,511,329. Washington,<br />
DC: U.S. Patent and Trademark Office.<br />
[7] C. Phillips, T. Nagle. (1990). “Digital Control: System Analysis and<br />
Design‖. Englewood Cliffs, NJ: Prentice Hall.<br />
[8] B. Barraclough K. Dutton S. Thompson. (1997). The Art of Control<br />
Engineering. Harlow, England: Addison-Wesley.<br />
[9] J. L. Fuller. (1999). Robotics: Introduction, Programming, and<br />
Projects. Upper Saddle River, NJ: Prentice Hall.<br />
[10] S. R. Ruocco. (1987). “Robot Sensors and Transducers‖. New York-<br />
Toronto: Halsted Press.<br />
[11] “iPhone 4: Technical Specs”. Apple. [Online]. Available:<br />
http://www.apple.com/iphone/specs.html<br />
[12] A. C. Staugaard, Jr. (1987). Robotics and AI. Englewood Cliffs, NJ:<br />
Prentice Hall.<br />
[13] (1987, April). “Voyager-The Flying Computer Center”. NASA.<br />
[Online]. Available: http://history.nasa.gov/computers/Ch6-2.html<br />
[14] (2011, February 25). “Frequently Asked Questions”. Jet Propulsion<br />
Laboratory. [Online]. Available: http://voyager.jpl.nasa.gov/faq.html<br />
[15] M. Bajracharya, M.Maimone, D. Helmick. (2008, December).<br />
“Autonomy for Mars Rovers: Past, Present, and Future”. Computer Vol. 41<br />
No. 12 p. 45.<br />
[16] C. Cook. (2010, June 28). “Voyager 2 at 12,000 Days: The Super-<br />
Marathon Continues”. NASA. [Online]. Available:<br />
http://www.nasa.gov/mission_pages/voyager/voyager20100628.html<br />
[17] C. Cook. (2010, May 24). “Engineers Diagnosing Voyager 2 Data<br />
System—Update”. Jet Propulsion Laboratory. [Online]. Available:<br />
http://www.jpl.nasa.gov/news/news.cfm?release=2010-151<br />
[18] M. Raibert. (1986). “Legged Robots That Balance‖. Cambridge,<br />
Massachusetts: MIT Press.<br />
[19]http://upload.wikimedia.org/wikipedia/commons/1/10/Dragons_Teeth_<br />
at_Waverley_Abbey.JPG<br />
[20] “What Powers Watson?” IBM. [Online]. Available: http://www-<br />
03.ibm.com/innovation/us/watson/watson-for-a-smarter-planet/watsonschematic.html<br />
[21] M. Raibert, K. Blankespoor, G. Nelson, R. Playter, and the BigDog<br />
Team. (2008, April 8). “BigDog, the Rough-Terrain Quadruped Robot.”<br />
Boston Dynamics. [Online]. Available:<br />
http://www.bostondynamics.com/bd_index.html<br />
[22] Boston Dynamics. (2008). BigDog Powerpoint Slides. [Online].<br />
Available: http://www.bostondynamics.com/bd_index.html<br />
[23] Pierce, Julia. (2007, Aug. 13). “Sweet Solutions”. Engineer . Vol. 293<br />
Issue 7730, p46-48<br />
ACKNOWLEDGEMENTS<br />
We would like to thank our parents for inspiring our interest<br />
in the field of robotics. Also, we would like to thank our<br />
session co-chair Caitlin Magley and session chair Greg<br />
Wunderley for supporting us during the research process.<br />
University of Pittsburgh Swanson School of Engineering<br />
Eleventh Annual Freshman Conference April 9, 2011<br />
8












