Stepper drives Servostep drives Controllers
Stepper drives Servostep drives Controllers
Stepper drives Servostep drives Controllers

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
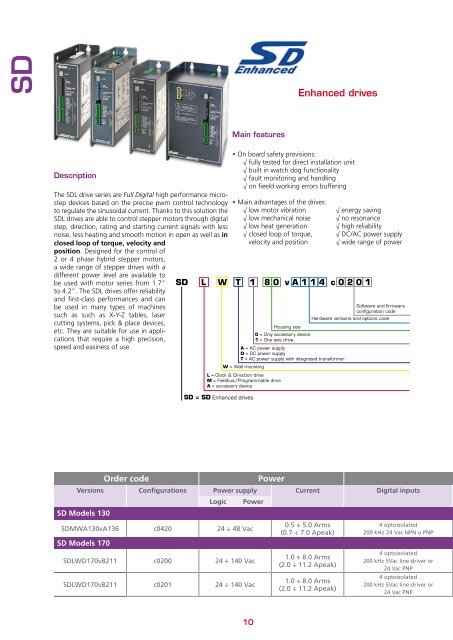
SD<br />
Enhanced <strong>drives</strong><br />
0 8 1 - 0 0<br />
Main features<br />
SW1 A 9 1 6 0 C 0 6 1 - 0 0 c 0 3 0 0<br />
• On board safety provisions:<br />
√ fully tested for direct installation unit<br />
√ built in watch dog functionality<br />
Axles number Description<br />
I/O configuration code<br />
√ fault monitoring and handling<br />
Hardware versions and options code<br />
Axles number<br />
√ on fieeld working errors buffering<br />
0 = No serial interface<br />
I/O configuration code<br />
The SDL drive series are Full Digital high performance microstep<br />
devices based on the precise pwm control technology • Main advantages of the <strong>drives</strong>:<br />
0 = No serial interface · 3 = RS232/ RS422<br />
N = No fieldbus<br />
to regulate the sinusoidal current. Thanks to this solution the √ low motor vibration<br />
· C = CANbus · P = Profibus<br />
√ energy saving<br />
Max current in Amps *10<br />
SDL <strong>drives</strong> are able to control stepper motors through digital √ low mechanical noise √ no resonance<br />
0 = Single power supply<br />
step, direction, rating and starting current signals with less 1 = Separated √ low heat power generation<br />
supply inputs for logic and √ power high reliability<br />
noise, less heating and smooth motion in open as well as Voltage in range √ closed code loop of torque, √ DC/AC power supply<br />
closed loop of torque, velocity and<br />
A = AC power supply velocity · D = DC and power position supply<br />
√ wide range of power<br />
position. Designed for the control of<br />
2 or 4 phase hybrid stepper motors,<br />
SW1= Wall mounting software controlled <strong>drives</strong><br />
a wide range of stepper <strong>drives</strong> with a<br />
different power level are available to<br />
v 4 2 2 1 c be 0 used 3 x with x motor series from 1.7” SD L W T 1 8 0 v A 1 1 4 c 0 2 0 1<br />
to 4.2”. The SDL <strong>drives</strong> offer reliability<br />
and first-class performances and can<br />
o fieldbus<br />
mps *10<br />
er supply<br />
rolled <strong>drives</strong><br />
using size<br />
cessory device<br />
s drive<br />
Options code<br />
Hardware versions and options code<br />
ply<br />
ply<br />
ly with integrated transformer<br />
be used Software in many and firmware types of machines<br />
configuration code<br />
such as such as X-Y-Z tables, laser<br />
cutting systems, pick & place devices,<br />
etc. They are suitable for use in applications<br />
that require a high precision,<br />
speed and easiness of use.<br />
Housing size<br />
0 = Only accessory device<br />
1 = One axis drive<br />
A = AC power supply<br />
D = DC power supply<br />
T = AC power supply with integrated transformer<br />
W = Wall mounting<br />
L = Clock & Direction drive<br />
M = Fieldbus/Programmable drive<br />
A = accessory device<br />
Software and firmware<br />
configuration code<br />
Software and firmware<br />
configuration code<br />
Hardware versions and options code<br />
SW<br />
S<br />
SD = SD Enhanced <strong>drives</strong><br />
4 3 B 4 0 c 0 3 0 0<br />
SM 2 A 6 60P N 3 4 3 C 4 0 c 0 4 9 9<br />
GW<br />
Order code<br />
Software and firmware<br />
configuration code<br />
0 = options number<br />
N = No encoder<br />
4 = 400 ppr integrated incremental encoder<br />
A = 3.4 Nm 1/2 stack motor<br />
B = 4.5 Nm 1 SD stack Models motor 130<br />
C = 7.0 Nm 2 stacks motor<br />
D = 8.5 Nm 3 stacks motor<br />
E = 12.5 Nm 4 stacks motor<br />
Power<br />
Versions Configurations Power supply Current Digital inputs<br />
Logic<br />
SDMWA130vA136 c0420 24 ÷ 48 Vac<br />
3 = motor flange dimension (3,4" - 86 mm)<br />
SD Models 170<br />
4 = 4 digital inputs and 2 digital outputs<br />
Power<br />
A = motore 1/2 stadio da 3,4 Nm<br />
B = motore 1 stadio da 4,5 Nm<br />
C = motore 2 stadi da 7,0 Nm<br />
0.5 ÷ 5.0<br />
D =<br />
Arms<br />
motore 3 stadi da 8,5 Nm 4 optoisolated<br />
E = motore 4 stadi da 12,5 Nm<br />
(0.7 ÷ 7.0 Apeak)<br />
200 kHz 24 Vac NPN o PNP<br />
3 = flangia motore da 3,4” (86 mm)<br />
= CANbus interface with in and out connection<br />
C0 = interfaccia CAN Bus con connessione in/out 4 optoisolated<br />
= Profibus interface<br />
N3 = 1.0 interfaccia ÷ 8.0 RS232 Arms/ RS485<br />
SDLWD170vB211 c0200 24 ÷ 140 Vac<br />
200 kHz 5Vac line-driver or<br />
3 = RS232 / RS485 interface<br />
N2 (2.0 = interfaccia ÷ 11.2 RS485 Apeak) con connessione in/out<br />
2 = RS485 interface with in and out connection<br />
24 Vac PNP<br />
60P = Motore da 6.0 Amps connesso in bipolare parallelo<br />
ps motor in bipolar parallel connection<br />
4 optoisolated<br />
5 = Ingresso di alimentazione 1.0 ÷ separato 8.0 Arms per logica e potenza<br />
supply inputs for logic and power SDLWD170vB211 c0201 24 ÷ 140 6 = Ingresso Vac unico per alimentazione<br />
200 kHz 5Vac line-driver or<br />
ly input<br />
(2.0 ÷ 11.2 Apeak)<br />
A = Alimentazione in AC monofase/trifase<br />
24 Vac PNP<br />
or three phases<br />
D = Alimentazione in DC<br />
2 = Codice interno<br />
Codice firmware<br />
e configurazione software<br />
0 = Numero opzioni<br />
N = nessun encoder<br />
4 = encoder incrementale integrato da 400 ppr<br />
4 = 4 ingressi digitali e 2 uscite digitali<br />
SM = Smart Motor<br />
10