Finite Strip Modeling for Optimal Design of Folded Plate Structures
Finite Strip Modeling for Optimal Design of Folded Plate Structures
Finite Strip Modeling for Optimal Design of Folded Plate Structures

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
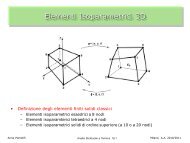
Engineering <strong>Structures</strong> 26 (2004) 1043–1054www.elsevier.com/locate/engstruct<strong>Finite</strong> strip modeling <strong>for</strong> optimal design <strong>of</strong> prestressedfolded plate structuresAlessio Bergamini a , Fabio Biondini b,a Consultant Engineer, Via F. Turati, 23, 24057 Martinengo (BG), Italyb Department <strong>of</strong> Structural Engineering, Technical University <strong>of</strong> Milan, Piazza L. da Vinci, 32, 20133 Milan, ItalyReceived29 July 2003; receivedin revised<strong>for</strong>m 29 January 2004; accepted5 March 2004AbstractThe optimal limit state design <strong>of</strong> prestressed thin-walled folded plate structures under multiple loading conditions is presented.The design variables include (a) geometrical quantities, like the thickness and the dimensions <strong>of</strong> the structural members, (b) topologicalparameters, which define the location andthe connectivity <strong>of</strong> such elements, and(c) the characteristics <strong>of</strong> the eventual prestressingsystem, described by the prestressing <strong>for</strong>ces and the cables pr<strong>of</strong>ile. Besides the physical and technological limits on suchvariables, the design constraints account <strong>for</strong> given limit states on both the stress and the displacement states which define thestructural behavior. The objective <strong>of</strong> the design process is to find the structural layout which minimizes the structural volumeand/or the total prestressing <strong>for</strong>ce according to the mentioned side and behavioral constraints. The solution <strong>of</strong> the correspondingnon-linear optimization problem is achieved by using a numerical procedure based on the complex method. The structural analysesrequired during the optimization process are per<strong>for</strong>med by using the finite strip method. Some applications to the optimaldesign <strong>of</strong> beams, vaults and box-girder bridges show the effectiveness <strong>of</strong> the proposed procedure.# 2004 Elsevier Ltd. All rights reserved.Keywords: <strong>Folded</strong> plate structures; <strong>Finite</strong> strip method; Prestressing; Structural optimization; Complex method1. Introduction<strong>Design</strong>, construction andmanagement <strong>of</strong> everyengineering system usually involve several technologicalandmanagerial decisions aimedto minimize therequiredef<strong>for</strong>t or maximize the desiredbenefit. Instructural design, the importance <strong>of</strong> this optimizationprocess is emphasizedwhen the scheme <strong>of</strong> the carryingmechanism follows the shape <strong>of</strong> the structure itself,becoming in this way a direct expression <strong>of</strong> its functionalrequirements. Clearly, the complexity <strong>of</strong> thedesign choices involved in this phase depends on thetypology <strong>of</strong> the considered structural system.There is a great deal <strong>of</strong> structures <strong>for</strong> which both thegeometry andthe material properties can be consideredconstants along a main direction, straight or curved,while, generally, only the loading distribution may vary. Corresponding author. Tel.: +39-02-2399-4394; fax: +39-02-2399-4220.E-mail address: biondini@stru.polimi.it (F. Biondini).In many cases, the per<strong>for</strong>mance <strong>of</strong> these structures isalso improvedby means <strong>of</strong> proper longitudinal prestressingsystems. Fig. 1 shows some <strong>of</strong> these structuraltypes, which refer to thin-walledbeams, cylindrical andprismatic shell ro<strong>of</strong>s [1] and box-girder bridges [6,9,13].For these structures, the design process should lead todefine the optimal morphology <strong>of</strong> the transversal crosssection,which means its geometry, size, shape andtopology,as well as the layout <strong>of</strong> the prestressing system,described by the prestressing <strong>for</strong>ces and the cables pr<strong>of</strong>ile.In such context, the attention <strong>of</strong> this paper is focussedonthe optimal design <strong>of</strong> thin-walledprestressedstructures composedby foldedplates andsubjectedtomultiple loading conditions [3,4]. A proper modeling <strong>of</strong>these structures can be foundwithin the framework <strong>of</strong>the finite strip method(Fig. 2). As well known, thismethodis basedon the <strong>for</strong>mulation <strong>of</strong> a special class<strong>of</strong> finite elements as long as the structure andinterconnectedalongthe nodal lines that constitute thesides <strong>of</strong> the strips themselves [5,7,8]. As <strong>for</strong> many other0141-0296/$ - see front matter # 2004 Elsevier Ltd. All rights reserved.doi:10.1016/j.engstruct.2004.03.005
1044 A. Bergamini, F. Biondini / Engineering <strong>Structures</strong> 26 (2004) 1043–1054Fig. 1. Some examples <strong>of</strong> structures <strong>for</strong> which both the geometry and the material properties can be considered constants along a main direction.(a) Bridge decks with prestressed girders and box-girder bridges; (b) Prestressed prismatic and cylindrical shell ro<strong>of</strong>s; (c) Prestressed thin-walledbeams.classical modeling techniques, eventual prestressing systemscan also be properly modeled by means <strong>of</strong> a set <strong>of</strong>loads equivalent to the prestressing actions taking bothinstantaneous and time dependent losses into account.Basedon such kind<strong>of</strong> modeling, the choice <strong>of</strong> thedesign variables considers (a) geometrical quantities,like the thickness andthe dimensions <strong>of</strong> the finitestrips, (b) topological parameters, which define thelocation andthe connectivity <strong>of</strong> such elements, and(c)the characteristics <strong>of</strong> the eventual prestressing system,described by the prestressing <strong>for</strong>ces and the cables pr<strong>of</strong>ile.In particular, the design space <strong>of</strong> feasible structuralmorphologies is restrictedto satisfy physical andtechnologicallimits on the design variables, as well as givenlimit states on both the stress andthe displacementstates which define the structural behavior at the serviceabilitystage. In the selection <strong>of</strong> these design constraints,special attention is paidto the definition <strong>of</strong> aproper de<strong>for</strong>mability index which accounts <strong>for</strong> theparticular nature <strong>of</strong> the structures investigatedin thepresent work. The optimal choice within this set <strong>of</strong>feasible solutions is basedon the definition <strong>of</strong> an objectivefunction to be minimizedwhich represents aweightedsum <strong>of</strong> the structural volume andthe totalprestressing <strong>for</strong>ce. The solution <strong>of</strong> the correspondingnon-linear optimization problem is achievedby using anumerical procedure based on the well-known complexmethod [2,12].Fig. 2. Reference systems and finite element model. (a) <strong>Finite</strong> strip element between the nodal lines i and j in the local reference system (x,y,z);(b) <strong>Finite</strong> strip modeling <strong>of</strong> the structure in the global reference system (X,Y,Z); (c) Thickness distribution <strong>of</strong> the cross-section.
A. Bergamini, F. Biondini / Engineering <strong>Structures</strong> 26 (2004) 1043–1054 1045In the following, the general criteria <strong>of</strong> the structuralmodeling and the basic <strong>for</strong>mulation <strong>of</strong> the proposeddesign methodology are presented and explained. Specialattention is paidto the choice <strong>of</strong> the design variables,the definition <strong>of</strong> the design constraints and the<strong>for</strong>mulation <strong>of</strong> the objective function. The effectiveness<strong>of</strong> the proposedmethodology is finally proven by someapplications to the optimal design <strong>of</strong> beams, vaults andbox-girder bridges.2. Formulation <strong>of</strong> the optimization problemThe problem <strong>of</strong> the optimum structural design consists<strong>of</strong> finding a set <strong>of</strong> design variables which accounts<strong>for</strong> assigneddesign constraints andoptimizes one ormore given target requirements. There<strong>for</strong>e, from amathematical point <strong>of</strong> view, the purpose <strong>of</strong> the designprocess is to finda vector x which optimizes the value<strong>of</strong> an objective function f(x), according to either sideconstraints with bounds x and x + , or inequalitygðxÞ 0 and/or equality hðxÞ ¼0 behavioral constraints.Since, without any loss <strong>of</strong> generality, minimizationproblems only may be considered, theprevious optimization problem is cast in the following<strong>for</strong>m:minff ðxÞjxx x x þ ; gðxÞ 0; hðxÞ ¼0g ð1Þwhich, in the general case, represents a non-linear programmingproblem.2.1. Choice <strong>of</strong> the design variablesIn structural design, the choice <strong>of</strong> the design variablesrepresents a crucial point which drives the wholedesign process. For the class <strong>of</strong> structures consideredhere, the design variables can be conveniently definedon the base <strong>of</strong> the finite strip model adopted <strong>for</strong> thestructural analyses. This means that the design modelandthe analysis model are strongly relatedbetweenthem, even if they express different points <strong>of</strong> view <strong>of</strong>the structural problem. Specifically, the analysis modelis defined as a set <strong>of</strong> folded plates interconnected toeach other in the longitudinal direction along one <strong>of</strong>their external nodal lines. There<strong>for</strong>e, the design variableswhich define the design model can be chosen asdescribed in the following points (Fig. 3):– The structural shape is directly defined by thelocation <strong>of</strong> the nodal lines.– The structural size is relatedto the thickness <strong>of</strong> theFig. 3. Choice <strong>of</strong> the design variables. (a) Geometry: coordinates <strong>of</strong> the nodal lines and thickness <strong>of</strong> the finite elements; (b) Topology: structuralconfiguration; (c) Prestressing system: intensity <strong>of</strong> the prestressing <strong>for</strong>ces andcoordinates <strong>of</strong> the control points <strong>of</strong> the cables pr<strong>of</strong>ile.
1046 A. Bergamini, F. Biondini / Engineering <strong>Structures</strong> 26 (2004) 1043–1054finite strips. In particular, by assuming the thickness<strong>of</strong> each plate as linearly varying, the thickness valuesat the nodal lines completely define the thickness distributionover the whole structure.– The structural topology depends on the mutualarrangement <strong>of</strong> the strips. In this sense, several alternativestructural topologies, <strong>for</strong> example, identifiedthrough an integer variable, needto be consideredduring the design process. This can be done bybuilding a family <strong>of</strong> derived topologies by the elimination<strong>of</strong> one or more folded plates from a given basictopology.– The prestressing system is representedby a set <strong>of</strong>post-tensionedcables at one or both <strong>of</strong> their endsandit is fully definedby the intensity <strong>of</strong> the prestressing<strong>for</strong>ces andby the longitudinal pr<strong>of</strong>ile <strong>of</strong> thecables. In this study, the curvilinear pr<strong>of</strong>ile <strong>of</strong> thecables is described by means <strong>of</strong> Bézier’s curves [10],which are polynomial curves <strong>of</strong> degree n 2 definedby the position <strong>of</strong> nþ1 control points.Basedon the above mentionedcriteria, in the proposed<strong>for</strong>mulation,the components <strong>of</strong> the design vectorx can be identified as quantities belonging to one <strong>of</strong>the following classes:(a) Geometry: coordinates <strong>of</strong> the nodal lines andthickness <strong>of</strong> the finite elements;(b) Topology: integer value which identifies the structuralconfiguration;(c) Prestressing system: intensity <strong>of</strong> the prestressing<strong>for</strong>ces andcoordinates <strong>of</strong> the control points whichdefine the cables pr<strong>of</strong>ile.2.2. Definition <strong>of</strong> the behavioral design constraintsThe dimensions and the components <strong>of</strong> the vectorsg(x) and h(x) are clearly depending on the particulardesign problem which has to be solved. They representsome restrictions on the system behavior or per<strong>for</strong>mance,expressedas a function <strong>of</strong> the design variablesboth in explicit andimplicit way. In particular, thestructural per<strong>for</strong>mance at the serviceability stageusually drives the design process <strong>for</strong> the class <strong>of</strong> structuresconsidered here. There<strong>for</strong>e, since the structuralresponse under the serviceability loads can be effectivelymodeled in the linear elastic range, the behavioraldesign constraints gðxÞ 0 and hðxÞ ¼0assumedin the proposed<strong>for</strong>mulation deal with boththe static andkinematic fields evaluatedby means <strong>of</strong> alinear elastic analysis.With respect to the static field, the stress states ¼ sðxÞ must not leadto mechanical crisis related<strong>for</strong>example to the local rupture <strong>of</strong> the materials. For thespecial class <strong>of</strong> structures investigatedhere, the totalstress fieldis generally given by the superposition <strong>of</strong> atransversal behavior, mainly regulatedby the bendingstresses at the local level, and<strong>of</strong> a longitudinal behavior,mainly regulatedby the membrane stress fieldat theglobal level. For this reason, the failure conditions onboth the membrane s a ¼ s a ðxÞ ¼½n x n y n xy Š T andbending s b ¼ s b ðxÞ ¼½m x m y m xy Š T stress fields,referredto the directions <strong>of</strong> orthotropy <strong>for</strong> non-isotropicstructures, are assumed to be independent between themanddefinedby the following design constraints:23n x n xn x n þ xn y n yn y n þ yn 2 xy ðn þ x n x Þðn þ y n y ÞgðxÞ¼ g n 2 xy ðn x þn x Þðn y þn y ÞaðxÞ¼ 0 ð2Þg b ðxÞm x m xm x m þ xm y m ym y m þ y64m 2 xy ðm þ x m x Þðm þ 7y m y Þ5m 2 xy ðm x þm x Þðm y þm y Þwhere the non-negative quantities n x ; n þ x ; n y ; nþ y andm x ; m þ x ; m y ; mþ y represent the limit values <strong>for</strong> theelementary stress states <strong>of</strong> mono-axial tension/compressionandsimple shear <strong>for</strong> the membrane andthebending stress fields respectively. In particular, the constraintsg a ðxÞ 0 and g b ðxÞ 0 are described in thestress space, by two limit surfaces, Iðs a Þ¼0andIðs b Þ¼0<strong>for</strong> the membrane andbending stress field, respectively,each <strong>of</strong> them defined by a couple <strong>of</strong> cones as shown inFig. 4 [11]. When the hypothesis <strong>of</strong> independent failureconditions cannot be assumed, a limit surface IðsÞ ¼0taking into account the interaction <strong>of</strong> the membrane andbending stress fields can also be effectively derived froma linear interpolation <strong>of</strong> the limit surfaces Iðs a Þ¼0 andIðs b Þ¼0. Clearly, the constraints gðx; r; yÞ 0 must beverified<strong>for</strong> each loading condition r andin each point <strong>of</strong>the structures, or along the longitudinal coordinate y <strong>of</strong>each finite strip. In order to reduce the problem toalgebraic <strong>for</strong>m, the constraints are verifiedonly in afinite number <strong>of</strong> transversal cross-sections.From the kinematic point <strong>of</strong> view, the displacementfield d ¼ dðxÞ shouldnot leadto loss <strong>of</strong> <strong>for</strong>m. For thispurpose, it is introduced a suitable measure <strong>of</strong> de<strong>for</strong>mationrepresentedby a local de<strong>for</strong>mability indexd ¼ dðx;r;yÞ <strong>of</strong> the cross-sections:kdðx;r;yÞd 0 ðx;r;y;aÞkdðx;r;yÞ ¼ minð3Þpap kdðx;r;yÞkandby a global de<strong>for</strong>mability index d ¼ dðx;rÞ <strong>of</strong> the
A. Bergamini, F. Biondini / Engineering <strong>Structures</strong> 26 (2004) 1043–1054 1047The corresponding behavior design constraint is then<strong>for</strong>mulatedas follows:g c ðxÞ ¼dðxÞ d max 0 ð6Þ2.3. Choice <strong>of</strong> the objective functionFig. 4. Limit surfaces (a) Iðs a Þ¼0 and(b) Iðs b Þ¼0, associatedtothe limit states on the membrane and bending stress field, respectively(n þ x ¼ n p; n x ¼ vn p ; n þ y ¼ ln p; n y ¼ l 0 n p ; m þ x ¼ m p; m x ¼ vm p ;m þ y ¼ lm p; m y ¼ l 0 m p ).structure:dðx;rÞ ¼ 1 ð Ldðx;r;yÞdyð4ÞL 0where d ¼ dðx;r;yÞ is the nodal displacement vector <strong>of</strong>the cross-section at the longitudinal location y <strong>for</strong> theloading condition r, d 0 ¼ d 0 ðx;r;y;aÞ is the same vectorassociatedto a rigidrotation a <strong>of</strong> the unde<strong>for</strong>medcross-section aroundits center <strong>of</strong> gravity in thede<strong>for</strong>med configuration, the operator jj jj denotes theEuclidean vector norm, and L is the longitudinal length<strong>of</strong> the structure. In particular, the de<strong>for</strong>mability indicesd give a measure <strong>of</strong> the de<strong>for</strong>mability <strong>of</strong> both the crosssectionsandthe structure, respectively. Their valuesmay vary between 0 and1, which represent the limitingsituations <strong>of</strong> rigidandinfinitely de<strong>for</strong>mable structuralconfiguration, respectively. Basedon these indices, thestructure is en<strong>for</strong>cedto maintain a sufficient rigidity byintroducing an indirect constraint on the maximumvalue <strong>of</strong> the global de<strong>for</strong>mability index d ¼ dðxÞ:dðxÞ ¼maxdðx;rÞ d maxð5Þrwhere d max is a suitable upper bound<strong>of</strong> the index d(x).Several quantities able to represent the structuralper<strong>for</strong>mance may be chosen as target requirements <strong>for</strong>optimal design. A proper choice <strong>of</strong> the objective functiondepends on the nature <strong>of</strong> the problem and representsa strategic phase <strong>of</strong> the optimization process. Inthis paper, attention is focussedon both the materialvolume andthe prestressing <strong>for</strong>ce, consideredto be themain aspects which contribute to define the total cost<strong>of</strong> the structure. The objective function is then chosenas a linear combination <strong>of</strong> the total volume V(x) <strong>of</strong>the structure andthe weightedprestressing <strong>for</strong>cePðxÞ ¼ P i b iP i ðxÞ as follows:f ðxÞ ¼w V f V ðxÞþw P f P ðxÞVðxÞ¼ w VVðx 0 Þ þ w PðxÞPð7ÞPðx 0 Þwhere b i is the weight associatedto the prestressing<strong>for</strong>ce <strong>of</strong> the cable i ( P i b i ¼ 1:0), w V and w P are weightswhich express the relative importance <strong>of</strong> the dimensionlessobjective functions f V (x) and f P (x), respectively, andx 0 is a reference vector <strong>of</strong> initial design.3. Numerical solution <strong>of</strong> the optimization problemThe optimization problem previously <strong>for</strong>mulatedissolvedby using a numerical technique derivedby theso-calledcomplex method[2,12] which is, as known, adeterministic non-linear mathematical programmingprocedure. The complex algorithm falls in the class <strong>of</strong>direct or zero-order methods, since it does not requirederivatives but only the evaluation <strong>of</strong> the involvedfunctions. Such characteristic makes the search processvery effective <strong>for</strong> the solution <strong>of</strong> the problems investigatedinthe present study, where the relationshipbetween the objective function andthe design variablesis generally only available in an implicit <strong>for</strong>m. In thefollowing, some details about the numerical algorithmandthe relatedsolution process are given.3.1. The complex methodThe complex methodis basedon the generation <strong>of</strong> asequence <strong>of</strong> complexes. A complex is a geometrical figureconsisting <strong>of</strong> k nþ1 vertices, <strong>of</strong> the segmentsinterconnecting them and<strong>of</strong> the relatedpolygonalareas that enclose a region <strong>of</strong> the n-dimensional designspace. Clearly, only the non-degenerate complexes, i.e.those which enclose a non-zero volume, are feasible <strong>for</strong>the development <strong>of</strong> the numerical procedure.
1048 A. Bergamini, F. Biondini / Engineering <strong>Structures</strong> 26 (2004) 1043–1054Fig. 5.Basic steps <strong>of</strong> the complex method: (a) reflection; (b) expansion, and (c) contraction.The basic idea <strong>of</strong> the method consists in comparingthe values assumedby the objective function in correspondence<strong>of</strong> the k nþ1 vertices <strong>of</strong> the complex and,in a secondtime, in moving the worst vertex x w in sucha way that some improvement is achieved(Fig. 5). Inparticular, after an initial complex is heuristicallydefined, the method moves towards an optimalsolution through several basic steps which start withthe reflection <strong>of</strong> the worst vertex x w , or the vertex associatedtothe largest value <strong>of</strong> the objective function,through the opposite face <strong>of</strong> the complex (Fig. 5(a)). Ifthe new vertex is again the worst, an improvement isobtainedthrough an expansion (Fig. 5(b)) or a contraction(Fig. 5(c)). On the contrary, a new vertex isselectedandthe procedure is repeateduntil an optimalsolution is found. In this way, instead <strong>of</strong> improving thebest result, the search strategy works by eliminating theworst one. Clearly, at each iteration, the basic stepsneed to be properly modified in order to en<strong>for</strong>ce thepath <strong>of</strong> the search process into the feasible region <strong>of</strong>the design space. As a concluding remark, it is outlinedthat a proper selection <strong>of</strong> the number <strong>of</strong> verticesusually requires k ffi 2n. Moreover, the center <strong>of</strong> gravity<strong>of</strong> the initial complex can be assumedas a goodchoice <strong>for</strong> the reference vector <strong>of</strong> initial design x 0 .3.2. Convergence criteriaThe capability <strong>of</strong> the complex methodin exploring awide region <strong>of</strong> the design space—eventually emphasizedbyusing several restarts <strong>of</strong> the solution processwith different initial complexes—usually leads to avoidpoints <strong>of</strong> local minimum. The optimal solution <strong>for</strong>each restart is considered to be reached when someconvergence criteria are satisfied. In particular, twoconditions must be contemporarily verified:(1) The dimensionless ratio e 1 between the maximumvalue <strong>of</strong> the distance <strong>of</strong> each vertex <strong>of</strong> the complexx i from its center <strong>of</strong> gravity x 0 andthe effectivedimensions <strong>of</strong> the admissible region is lower than aspecifiedtolerance e 1,max , or:e 1 ¼ max Dx 1 ðx i x 0 Þ e1;maxð8Þi¼1;...;kwhere23Dx 1 0 00 Dx 2 0Dx ¼ 674 5 ; with0 0 Dx nDx j ¼ x þ j x j ; j ¼ 1;2; ...;n ð9Þ(2) The dimensionless standard deviation e 2 <strong>of</strong> thevalues <strong>of</strong> the objective function f(x i ), computedatthe vertices <strong>of</strong> the complex i ¼ 1; 2; ...;k, withrespect to the reference value f(x 0 ) is lower than aspecifiedtolerance e 2,max , or:vffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiu1X k f ðx i Þ f ðx 0 Þ 2e 2 ¼ tk f ðxi¼10 Þvffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiu1X k f ðx i Þ 2¼ t 1 e 2;max ð10Þk f ðx 0 Þi¼13.3. Scaling <strong>of</strong> the design variablesThe complex methodhas been proven to be veryeffective in structural optimization. However, especiallydue to the different nature <strong>of</strong> the involved quantities, aproper scaling <strong>of</strong> the design variables should be adoptedin order to avoid numerical problems <strong>of</strong> ill-conditioning.To this aim, the design vector x is expressedas a function<strong>of</strong> its physical limits x and x þ as follows:x ¼ x þ Yðx þ x Þ ð11Þand the non-zero dimensionless components <strong>of</strong> the diagonalmatrix Y which vary in the range [0;1], are assumedas new scaleddesign variables.4. ApplicationsAs already mentioned, in the optimal design <strong>of</strong> thinwalledfoldedplatesstructures <strong>for</strong> which both thegeometry andmaterial properties are constant along acoordinate direction, straight or curved, the choice <strong>of</strong>the structural morphology consists in defining both thegeometry andtopology <strong>of</strong> the cross-section perpendicularto such direction. In addition, the layout <strong>of</strong> theprestressing system, when it is present, must be alsodefined. Considering such a context, some design
A. Bergamini, F. Biondini / Engineering <strong>Structures</strong> 26 (2004) 1043–1054 1049applications are now presentedandbriefly describedinorder to highlight the effectiveness <strong>of</strong> the proposeddesign methodology. Such applications are alldeveloped with reference to the following assumption:– The behavior <strong>of</strong> the material, assumedto be isotropicandlinear elastic, is definedby the Youngmodulus E ¼ 30:0 GPa andthe Poisson coefficientm ¼ 0:15. The self-weight <strong>of</strong> the structure is definedby a weight density c ¼ 25:0 kN=m 3 . For the prestressingsystem, the instantaneous losses are evaluatedbyassuming a friction coefficient betweencables andducts l ¼ 0:2 anda non-intentional curvature<strong>of</strong> the cables K 0 ¼ 0:005 rad/m.– The behavioral design constraints on the stress fieldare defined by the limit values n þ x ¼ n x ¼ nþ y ¼n y ¼ 12:0 t MN=m <strong>for</strong> the membrane <strong>for</strong>cesand m þ x ¼ m x ¼ mþ y ¼ m y ¼ 1:2 t2 MNm=m <strong>for</strong>the bending moments, where t (m) denotes the thickness<strong>of</strong> the corresponding plate. The minimum thicknesst min ¼ 0:1 m is assumedat both the ends <strong>of</strong> eachfolded plate.– The convergence <strong>of</strong> the search process is regulatedby the tolerance coefficients e 1;max ¼ e 2;max ¼ 0:01.4.1. Prestressed beamThe simply supportedbeam shown in Fig. 6(a), withlength L ¼ 30:0 m andcross-section having heightH ¼ 3:0 m and variable width, is considered. Besidesits self-weight, the beam is subjectedto a uni<strong>for</strong>m loadq ¼ 100:0 kN=m, appliedat the top side <strong>of</strong> the crosssection,andto the action <strong>of</strong> a straight prestressingcable located near the bottom side. The beam is modeledbyusing 20 finite strip elements having the samegeometrical dimensions. The thickness distributionalong the cross-section which minimizes both the totalvolume andthe intensity <strong>of</strong> the prestressing <strong>for</strong>ce(w V ¼ w P ¼ 1:0), is searched<strong>for</strong>. The optimal solutionis characterizedby the shape <strong>of</strong> the cross-section shownin Fig. 6(b), with a total volume Vðx opt Þ¼1:087 m 3 =manda prestressing <strong>for</strong>ce Pðx opt Þ¼5:550 MN.4.2. Prestressed ro<strong>of</strong> elementThe ro<strong>of</strong> element shown in Fig. 7(a), with lengthL ¼ 20:0 m,widthB ¼ 2:5 m andheight H ¼ 1:0 m,isconsidered. A longitudinal straight cable, prestressedwith a <strong>for</strong>ce P ¼ 100:0 kN, is locatedwithin the bottomplate. Besides its self-weight and a uni<strong>for</strong>m lineload Q 0 ¼ 3:0 kN/m appliedat the end<strong>of</strong> both thelateral wings, the ro<strong>of</strong> element is subjectedto two alternativeloading conditions shown in Fig. 7(a) andcharacterizedbythe uni<strong>for</strong>m loads q ¼ 2:0 kN=m 2 andv ¼ 1:0 kN=m 2 , respectively. The thickness distributionover the cross-section which minimizes the totalvolume is searched<strong>for</strong>. To this purpose, a constantthickness is assumed<strong>for</strong> each plate, with the exception<strong>of</strong> the lateral wings, <strong>for</strong> which two alternative solutions,with andwithout a terminal bulb, are considered.The optimal solutions are characterizedby theshapes <strong>of</strong> the cross-section shown in Fig. 7(b), (c). Itclearly appears that a higher thickness <strong>of</strong> the endparts<strong>of</strong> the wings can leadto a lower thickness <strong>of</strong> all theother plates (Fig. 7(c)). This latter optimal solution hasa total volume Vðx opt Þ¼0:538 m 3 =m.4.3. Barrel vault with edge beamsThe barrel vault shown in Fig. 8(a), with lengthL ¼ 30:0 m, width B ¼ 10:0 m andconstant thickness,is considered. The vault is supported by the two edgebeams having a rectangular cross-section with heighth ¼ 1:0 m. Besides its self-weight, the structure is subjectedto two alternative loading conditions shownin Fig. 8(a) andcharacterizedby the uni<strong>for</strong>m loadsq ¼ 3:0 kN=m 2 and v ¼ 1:0 kN=m 2 , respectively. Theshape <strong>of</strong> the vault andthe thickness <strong>of</strong> both the vaultandthe edge beams which minimize the total volumeare searched<strong>for</strong>. To this purpose, the shape <strong>of</strong> thevault is described by a third degree polynomial curvedefined by the symmetrical location <strong>of</strong> the controlpoints B and C, as shown in Fig. 8(b). The optimal solution,that is characterizedby the shape <strong>of</strong> the vaultxFig. 6.Prestressed beam. (a) Main dimensions and load. (b) <strong>Optimal</strong> cross-sectional shape.
1050 A. Bergamini, F. Biondini / Engineering <strong>Structures</strong> 26 (2004) 1043–1054Fig. 7. Ro<strong>of</strong> element. (a) Main dimensions and loads. (b) <strong>Optimal</strong> thickness distributions, wings with constant thickness and (c) wings with aterminal bulb.andthe thickness distribution shown in Fig. 8(b), has atotal volume Vðx opt Þ¼0:753 m 3 =m.4.4. Bridge deck with prestressed girdersThe bridge deck shown in Fig. 9(a), with lengthL ¼ 40:0 m, width B ¼ 12:0 m andheight H ¼ 3:0 m,is considered. Besides its self-weight and the weight <strong>of</strong>the non-structural elements g p ¼ 4kN=m 2 , the structureis subjectedto the four alternative loading conditionsshown in Fig. 9(a), with q ¼ 8:0 kN=m 2 . Boththe girders are prestressed with a cable whose pr<strong>of</strong>ile isdescribed by a third degree polynomial curve. Thethickness distribution over the cross-section and thecables pr<strong>of</strong>ile which minimize both the total volumeandthe prestressing <strong>for</strong>ce (w V ¼ w P ¼ 1:0), are searched<strong>for</strong>.To this purpose, the width <strong>of</strong> the finite stripsis assumedto be variable. Moreover, two different constraints<strong>for</strong> the global de<strong>for</strong>mability index d(x) are considered,respectively with (1) d max;1 ¼ 0:75 and(2) d max;2 ¼ 0:50. The optimal thickness distributionandthe cable layout are shown <strong>for</strong> both cases (1) and(2) in Fig. 9(b) and(c), respectively. The correspondingoptimal values <strong>of</strong> the total volume and<strong>of</strong> the prestressing<strong>for</strong>ce are Vðx opt;1 Þ¼3:783 m 3 =m and Pðx opt;1 Þ¼7:079 MN <strong>for</strong> case (1), Vðx opt;2 Þ¼4:286 m 3 =m andPðx opt;2 Þ¼8:482 MN <strong>for</strong> case (2). It can be noticedthat solution (1), being associatedto a less restrictiveconstraint on the d-index, leads to lower values <strong>of</strong> volumeandprestressing with respect to solution (2).In order to better highlight the main aspects <strong>of</strong> thedesign process, Figs. 10–14 show the characteristics<strong>of</strong> the optimal solution (2) andthe correspondingevolution <strong>of</strong> the search procedure. In particular, Fig. 10shows the distribution along the longitudinal coordinatey <strong>of</strong> the maximum values attainedover all theloading conditions by the components <strong>of</strong> the behavioraldesign vectors g a (x) and g b (x), relatedto theFig. 8.Barrel vault. (a) Main dimensions and loads; (b) <strong>Optimal</strong> shape and thickness distribution.
A. Bergamini, F. Biondini / Engineering <strong>Structures</strong> 26 (2004) 1043–1054 1051Fig. 9. Bridge deck with girders. (a) Main dimensions and loads. <strong>Optimal</strong> thickness distribution and cable location at the middle span <strong>for</strong>(b) d max;1 ¼ 0:75, and(c) d max;2 ¼ 0:50. (d) <strong>Optimal</strong> cable layout.Fig. 11. Bridge deck with girders—case (2). Global de<strong>for</strong>mability indexd ¼ dðx;rÞ <strong>of</strong> the structure <strong>for</strong> each loading condition r ¼ 1; ...; 4.Fig. 10. Bridge deck with girders—case (2). Maximum design constraintvalues on (a) the membrane static field g a;j ðxÞ and(b) the bendingstatic field g b;j ðxÞ ðj ¼ 1; ...; 6Þ.Fig. 12. Bridge deck with girders—case (2). Distribution <strong>of</strong> the localde<strong>for</strong>mability index <strong>of</strong> the cross-sections d ¼ dðx;r;yÞ <strong>for</strong> each loadingcondition r ¼ 1; ...; 4.
1052 A. Bergamini, F. Biondini / Engineering <strong>Structures</strong> 26 (2004) 1043–1054Fig. 13. Bridge deck with girders—case (2). Evolution <strong>of</strong> the tolerancecoefficients e 1 and e 2 <strong>for</strong> convergence criteria.membrane andthe bending stress state, respectively.From the inspection <strong>of</strong> such figures, which highlightthe more critical cross-sections with respect to eachlimit condition, it can be noticed that the design constraintsare nowhere violated. Fig. 11 refers insteadtothe de<strong>for</strong>mability index d(x,r) which expresses, in anaverage sense, the kinematic displacement field. Alsoin this case, it appears that the upper limit d max;2 ¼0:50 is never violated. However, due to the averageFig. 14. Bridge deck with girders—case (2). Evolution <strong>of</strong> the objectivefunction f(x) and<strong>of</strong> its components f V (x) and f P (x) <strong>for</strong> the currentbest solution (w V ¼ w P ¼ 1:0; Vðx 0 Þ¼6:421 m 3 =m,Vðx opt Þ¼4:286 m 3 =m; Pðx 0 Þ¼16:654 kN, Pðx opt Þ¼8:482 kN).meaning <strong>of</strong> the global de<strong>for</strong>mability index, some localviolations are expectedat the sectional level near thesupports <strong>for</strong> the more demanding loading conditions.This is shown in Fig. 12, which refers to the localde<strong>for</strong>mability index d ¼ dðx;r;yÞ computed<strong>for</strong> eachcross-section.With reference to the path <strong>of</strong> the search process,Fig. 13 shows the evolution <strong>of</strong> the parameters e 1 and e 2Fig. 15. Box-girder bridge with internal diaphragms. (a) Main dimensions and loads. (b) Cross-sectional topologies. (c) <strong>Optimal</strong> shape, topologyandthickness distribution.
A. Bergamini, F. Biondini / Engineering <strong>Structures</strong> 26 (2004) 1043–1054 1053Fig. 16. Box-girder bridge with internal diaphragms. Distribution <strong>of</strong> the topologies at the vertices <strong>of</strong> the complex and evolution <strong>of</strong> the objectivefunction f ðxÞ DD f V ðxÞ <strong>for</strong> the current best solution.
1054 A. Bergamini, F. Biondini / Engineering <strong>Structures</strong> 26 (2004) 1043–1054adopted to check the convergence <strong>of</strong> the iterativeprocedure. Finally, Fig. 14 shows the correspondingevolution <strong>of</strong> the objective function f(x) and<strong>of</strong> its componentsf V (x) and f P (x).4.5. Box-girder bridge deck with internal diaphragmsThe box-girder bridge deck shown in Fig. 15(a), withlength L ¼ 40:0 m, total width B ¼ 16:0 m andheightH ¼ 2:0 m, is considered. Besides its self-weight, theweight <strong>of</strong> the non-structural elements g p ¼ 4kN=m 2andthe service loadp ¼ 2:0 kN=m 2 , the structure issubjected to the four alternative loading conditionsshown in Fig. 15(a), with q ¼ 8kN=m 2 . The thicknessdistribution andboth the shape andtopology <strong>of</strong> thecross-section which minimize the total volume, are searched<strong>for</strong>.To this purpose, the topologies associatedtothe four alternative symmetrical cross-sections shownin Fig. 15(b), each <strong>of</strong> them derived from the first fundamentalone by eliminating or not one or more internaldiaphragms, are considered. The search processleads to an optimal solution which corresponds to thetwo-cellular box girder shown in Fig. 15(c), with a totalvolume Vðx opt Þ¼7:737 m 3 =m. It is worth noting thatthe high value <strong>of</strong> thickness <strong>of</strong> the bottom slab intension is due to the hypothesis <strong>of</strong> homogeneousmaterial andelastic behavior. The disposition <strong>of</strong>proper longitudinal rein<strong>for</strong>cement, designed with referenceto the effective composite andnon-linear nature <strong>of</strong>the material, clearly allows a lower thickness <strong>of</strong> theconcrete slab.Finally, with reference to the path <strong>of</strong> the search process,Fig. 16 shows the distribution <strong>of</strong> the topologies atthe vertices <strong>of</strong> the complex andthe evolution <strong>of</strong> theobjective function f(x) <strong>for</strong> the current best solutionduring the iterative process.5. ConclusionsThe problem <strong>of</strong> finding the optimal shape, size andtopology <strong>of</strong> prestressed folded plate structures undermultiple loading conditions has been investigated. Thedesign problem has been <strong>for</strong>mulated as a mathematicaloptimization problem, accounting <strong>for</strong> both static andkinematic constraints, andit has been solvedby usinga numerical algorithm basedon the complex method.The structural analyses needed <strong>for</strong> the optimizationprocess have been per<strong>for</strong>medby using the finite stripmethod. A number <strong>of</strong> applications have shown theeffectiveness <strong>of</strong> the proposedprocedure.In particular, the design tools presented in this papercan usefully be appliedat the conceptual design stage,where the designer is usually interested in comparingbetween them a variety <strong>of</strong> alternative optimal solutions,derived, <strong>for</strong> example, by using different designmodels. These solutions, which the proposed procedureidentifies with wide generality, rationality and objectivity,can be then usedas a basis <strong>for</strong> a more detaileddesign <strong>of</strong> the rein<strong>for</strong>cement. Clearly, future developmentsare expectedin order to obtain a better control<strong>of</strong> the design problem, especially on the definition <strong>of</strong>the design constraints, which should also account <strong>for</strong>technological aspects, as well as <strong>for</strong> aesthetical andadditional functional requirements.References[1] ASCE. <strong>Design</strong> <strong>of</strong> cylindrical concrete shell ro<strong>of</strong>s. Manual <strong>of</strong>engineering practice. New York (NY): ASCE; 1952, p. 31.[2] Belegundu AD, Chandrupatla TR. Optimization concepts andapplications in engineering. Upper Saddle River (NJ): Prentice-Hall; 1999.[3] Bergamini A, Biondini F. Optimisation <strong>of</strong> folded plate structures.Proceedings <strong>of</strong> the Second International Conference onAdvances in Structural Engineering and Mechanics (ASEM02),Seoul, Korea, August 21–23. 2002.[4] Biondini F, Bontempi F, Malerba PG. Ottimizzazione di <strong>for</strong>madi strutture a folded-plates. Proceedings <strong>of</strong> the 13th C.T.E. Conference,Pisa, Italy, November 9–10–11. 2000 [in Italian].[5] Cheung YK. <strong>Finite</strong> strip methodin structural analysis. Ox<strong>for</strong>d:Pergamon Press; 1976.[6] Kristek V. Theory <strong>of</strong> box girder bridges. Prague: John WileyandSons; 1979.[7] Loo YC, Cusens A. The finite strip methodin bridgeengineering. London: E. & F.N. Spon; 1978.[8] Malerba PG, Toniolo G. Metodi di discretizzazionedell’analisi strutturale. Milan, Italy: Masson Editore; 1981[in Italian].[9] Martinez Y Cabrera F, Menni C. I ponti a cassone monocellularea pr<strong>of</strong>ilo de<strong>for</strong>mabile. Technical Report, 33. Istituto diScienza e Tecnica delle Costruzioni, Politecnico di Milano,Tamburini Editore, Milan, 1974 [in Italian].[10] Mortenson ME. Mathematics <strong>for</strong> computer graphicsapplications. New York (NY): Industrial Press; 1999.[11] Nielsen MP. Limit analysis andconcrete plasticity. Boca Raton(FL): CRC Press; 1999.[12] Rao SS. Engineering optimization—theory andpractice. NewYork (NY): John Wiley andSons; 1996.[13] Schlaich J, Scheef H. Concrete box-girder bridges. Structuralengineering documents, 1e. International Association <strong>for</strong> BridgeandStructural Engineering (IABSE); 1982.