Building System with Laplace Transform Example 1: A High-Pass ...
Building System with Laplace Transform Example 1: A High-Pass ...
Building System with Laplace Transform Example 1: A High-Pass ...
- No tags were found...

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
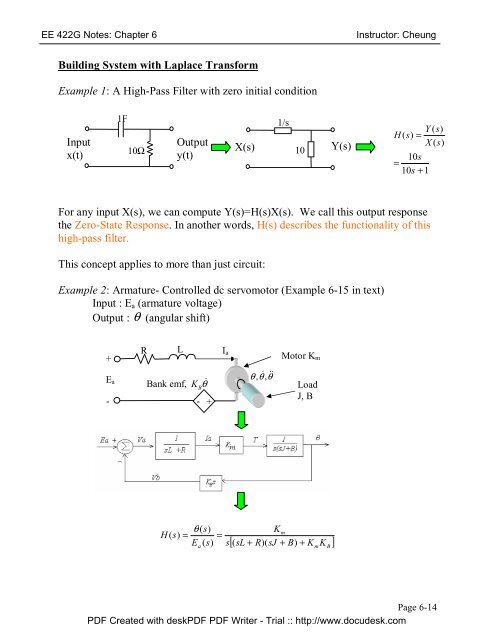
EE 422G Notes: Chapter 6Instructor: CheungThus, there are TWO COMPONENTS to the output response1. Zero-State Response (ZSR) or H(s)X(s)– It is called ZSR because it is the output response of the system if theinitial state (condition) is zero.C(s)2. Zero-Input Response (ZIR) ornn−1an s + an−1s + ... + a0• It is called ZIR because it is the output response of the system if theinput X(s) is zero.• Notice that it has the same denominator as the transfer function,implying that its ROC is the same as the transfer function. We aregoing to use this fact later.Separating the output response into two components that are based solely on inputand initial conditions allow us to infer unknown initial conditions given a specificinput. We will see an example in the homework.Do not confuse ZSR and ZIR <strong>with</strong> another type of categorization of outputresponse:1. Transient Response – The part of the output response that approaches 0 ast∞2. Forced (or Steady-State) Response - what remains in the output as t∞Let’s illustrate their differences <strong>with</strong> the following example:<strong>Example</strong> 6-71 st -order <strong>High</strong> <strong>Pass</strong> FilterInput v s( t)= 5cos(2t)u(t)Output y( t)= vR( t)Initial capacitor voltage: v0=-1RC = 1 secondPage 6-17PDF Created <strong>with</strong> deskPDF PDF Writer - Trial :: http://www.docudesk.com
EE 422G Notes: Chapter 6Instructor: CheungFind total responseY ( s)1 v0VS( s)= + + Y ( s)R Cs s⎛ 1 ⎞ v0Y ( s)⎜ + 1⎟= Vs( s)−⎝ RCs ⎠ s⎛ 1+s ⎞ v0Y ( s)⎜ ⎟ = Vs( s)−⎝ s ⎠ ss v0Y ( s)= Vs( s)−s + 1 s + 1It is clear from the first term is ZSR and the second is ZIR.Note that I didn’t subsitute v 0 =-1 and V s (s)=5s/(s 2 +4) in the very beginning of thecalculation. If I do that, I will obtain the output24( s −1)Y ( s)=2( s + 1)( s + 4)and I would have no way of differentiating the two components.(1) Find zero-input response and zero-state response−1⎡ v0⎤−tZero-input response: L ⎢− = −v0eu(t)s 1⎥= e −tu(t)⎣ + ⎦−1⎡ s ⎤ −1⎡ s 5s⎤Zero-state response: L⎢Vs( s)⎥= L⎢⋅2⎣ s + 1 ⎦ ⎣ s + 1 s + 4⎥ ⎦Apply partial fraction expansion, we gots 5s1 − 2 − j − 2 + j 1 2s− 2⋅ = − − = +22s + 1 s + 4 s + 1 s − j2s + j2s + 1 s + 4L−1⎡ s 5s⎤⎢⋅ = [ e2⎣s+ 1 s + 4⎥⎦−t+ 4cos2t− 2sin 2t]u(t)(2) Find transient and forced response−tCombining ZIR and ZSR: y( t)= [2e+ 4(cos 2t)− 2(sin 2t)]u(t)Transient response: Which terms go to zero as t∞?Steady-state response: Which terms do not go to zero as t∞?Answer: Transient response = 2e − t u(t)Steady-stte response = [ 4cos(2t)− 2sin(2t)] u(t)They are clearly different from ZSR and ZIR.Page 6-18PDF Created <strong>with</strong> deskPDF PDF Writer - Trial :: http://www.docudesk.com