SS-R200, SS-CDR200 RS-232C documentation - Tascam
SS-R200, SS-CDR200 RS-232C documentation - Tascam
SS-R200, SS-CDR200 RS-232C documentation - Tascam
- No tags were found...

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
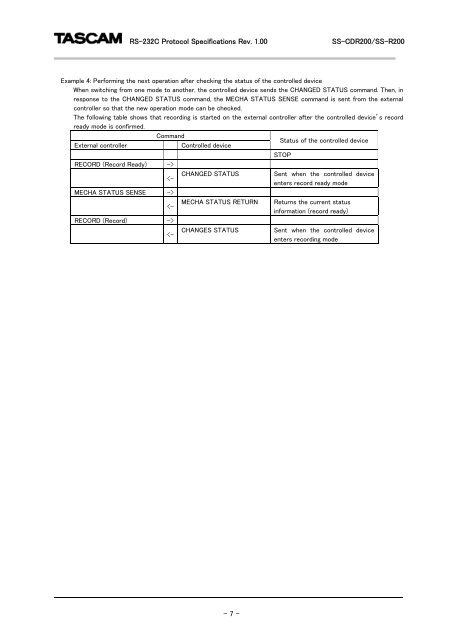
<strong>RS</strong>-<strong>232C</strong> Protocol Specifications Rev. 1.00<strong>SS</strong>-CD<strong>R200</strong>/<strong>SS</strong>-<strong>R200</strong>Example 4: Performing the next operation after checking the status of the controlled deviceWhen switching from one mode to another, the controlled device sends the CHANGED STATUS command. Then, inresponse to the CHANGED STATUS command, the MECHA STATUS SENSE command is sent from the externalcontroller so that the new operation mode can be checked.The following table shows that recording is started on the external controller after the controlled device’s recordready mode is confirmed.CommandStatus of the controlled deviceExternal controllerControlled deviceSTOPRECORD (Record Ready) ->CHANGED STATU<strong>SS</strong>ent when the controlled deviceMECHA STATUS RETURN Returns the current statusCHANGES STATU<strong>SS</strong>ent when the controlled device