SRI986 Electro-Pneumatic Positioner - webadmin1.net
SRI986 Electro-Pneumatic Positioner - webadmin1.net
SRI986 Electro-Pneumatic Positioner - webadmin1.net
- No tags were found...

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
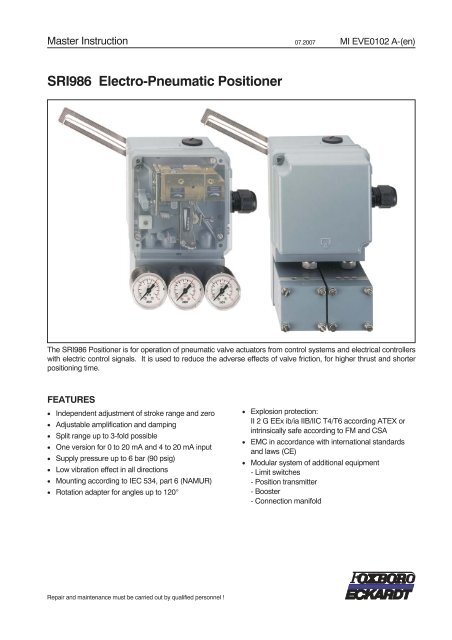
Master Instruction 07.2007 MI EVE0102 A-(en)<strong>SRI986</strong> <strong>Electro</strong>-<strong>Pneumatic</strong> <strong>Positioner</strong>The <strong>SRI986</strong> <strong>Positioner</strong> is for operation of pneumatic valve actuators from control systems and electrical controllerswith electric control signals. It is used to reduce the adverse effects of valve friction, for higher thrust and shorterpositioning time.FEATURES• Independent adjustment of stroke range and zero• Adjustable amplification and damping• Split range up to 3-fold possible• One version for 0 to 20 mA and 4 to 20 mA input• Supply pressure up to 6 bar (90 psig)• Low vibration effect in all directions• Mounting according to IEC 534, part 6 (NAMUR)• Rotation adapter for angles up to 120°• Explosion protection:II 2 G EEx ib/ia IIB/IIC T4/T6 according ATEX orintrinsically safe according to FM and CSA• EMC in accordance with international standardsand laws (CE)• Modular system of additional equipment- Limit switches- Position transmitter- Booster- Connection manifoldRepair and maintenance must be carried out by qualified personnel !
2 <strong>SRI986</strong> MI EVE0102 A-(en)CONTENTSPAGE1 GENERAL...........................3FUNCTION ..........................4ADDITIONAL EQUIPMENT. .............52 MOUNTING .........................62.1 Dimensions ..........................62.2 Mounting to diaphragm actuatorsaccording to JEC 534-6 .................82.3 Mounting to rotary actuators. ............103 ELECTRICAL CONNECTIONS . . . .......144 START-UP .........................144.1 Setting boost ........................144.2 Setting zero point and stroke ............154.3 Setting damping. .....................154.4 Subdivision of input range (Split-range) ....164.5 Determination of rotation angle Uϕ. .......164.6 Determination of stroke factor U x .........164.6.1 Stroke factor ranges of range springs. .....174.6.2 Characteristics of range springs . . . .......175 MAINTENANCE .....................185.1 Basic adjustment of single-acting positioner(pneumatic part) .....................185.2 Basic adjustment of double-acting positioner(pneumatic part) .....................195.3 Checking and adjusting the I-p converter ...205.4 Cleaning throttles. ....................226 BOOSTER REPLACEMENT ............227 SAFETY REQUIREMENTS. ............228 OPTION “LIMIT SWITCH” ..............239 OPTION “POSITION TRANSMITTER”. ....269.5 Setting and Start Up of position transmitter4-20mA...........................2710 SAFETY REQUIREMENTSFOR OPTIONS ......................2911 TROUBLESHOOTING ................30Photographs ........................31
MI EVE0102 A-(en) <strong>SRI986</strong> 31 GENERALThe electro-pneumatic positioner is used for directoperation of pneumatic valve actuators by means ofelectrical controllers or control systems with an analogoutput signal of 0 to 20 mA or 4 to 20 mA or split ranges.<strong>Positioner</strong> and pneumatic actuator form a control loopwith the command variable w s (output signal y of themaster controller), the correcting variable y s and thestroke position x s of the actuator.In this manner disturbing influences such as glandfriction and medium forces within the valve are compensatedby the positioner.In addition, the positioning force of the actuator cansignificantly be increased by an output pressure ofmax. 6 bar.The electro-pneumatic positioner can be mounted onboth diaphragm actuators and rotary actuators.For spring loaded actuators a single-acting positioneris used, whilst for actuators without spring loading adouble-acting positioner is used.The double-acting positioner operates with two opposingcontrol pressures. = I JA H? JH A H 2 I EJE A H ) ? JK = J H = N $ > = H " )5 JH A6 H= I EJJA HFig. 1: Control circuit with single-acting positioner8 = L AIdentificationThe nameplate of the positioner is located at the sidewall of the housing. Nameplates are in accordancewith selected model. Examples:Version without explosion protection5 4 15 4 1' & $12 5 6 - 7 / 5 4 - / - 4 12 2 5 16 1 - 49 14 7 / 5 9 - 15 - , - . ) + 6 1 , 2 2 - 6 , 7 * - - 1 . ) + 0 5 1 / - - 1 / ) / 1 2 7 6 " ) 7 7 . 6 5 7 2 2 ; = N $ > = H ' F I E4 - 8 7 C A > K C I JA F A H = JK H I EA D A * A @ EA K C I = A EJK C) > EA J6 A F A H = JK H A I A A 1 I JH K ? JE = K = = @ A E . H = ? A > O - ? = H @ J5 ) 5 . $ & ! $ 5 K JVersion EEx ib IIC T65 4 15 4 1' & $12 5 6 - 7 / 5 4 - / - 4 12 2 5 16 1 - 49 14 7 / 5 9 - 15 - , - . ) + 6 1 , 2 2 - 6 , 7 * - - 1 . ) + 0 5 1 / - - 1 / ) / 1 2 7 6 " ) 7 7 . 6 5 7 2 2 ; = N $ > = H ' F I E4 - 8 2 6 * ) 6 - : # ! 6 O F ) 1$ ! ! 11 / - - N E= E> 11* 11+ 6 $ 6 " 7 E ! 8 1E # ) + E . E 0 2 E 6 A F A H = JK H = I I A 7 C A > K C I JA F A H = JK H I EA D A * A @ EA K C I = A EJK C 2 E 6 A F A H = JK H A + = I I ) > EA J6 A F A H = JK H A I A A 1 I JH K ? JE = K = = @ A E . H = ? A > O - ? = H @ J5 ) 5 . $ & ! $ 5 K JVersion FM/CSA5 4 1' & $ 5 4 1' & $ , - . ) + 6 1 , - , ) + 6 1 12 2 5 16 1 - 4 2 5 16 1 - 7 4 121 2 7 6 - 6 4 - - " ) 91 6 4 1 5 1+ ) ; 5 ) . - 5 - + 7 4 16 - 1 6 4 1 5 - 3 7 - . 4 2 7 4 + ) 5 5 1, 18 15 1 / 4 7 2 5 ) * + , 0 ) ) 4 , 7 5 + ) 6 1 55 1 / - 5 1 2 - - . . - 6, 7 * - , 7 * - - . . - 61 ) + + 4 , ) + - 9 16 0 . : * 4 - + ) 4 , 6, 4 ) 9 1 / , # ! " ! ' $ ' - 6 16 ;8 = N " 8 1 = N # ) + E E ) : ) * 6 - 2 . 6 $ $ + + 5 ) " +4 - 8 ) 2 2 4 8 - , 9 ) 4 1 / 5 7 * 5 6 16 7 6 1 . + 2 - 6 5 ) ; 1 2 ) 14 1 6 4 1 5 1+ 5 ) . - 6 ;) 8 - 4 6 15 5 - - 6 ) 5 7 * 5 6 16 7 6 1 , - + 2 5 ) 6 5 2 - 7 6 + 2 4 - 6 6 4 - ) 5 - + 7 4 16 - 1 6 4 1 5 - 3 7 -1 6 4 1 5 1+ ) ; 5 ) . - 9 0 - + - + 6 - , 6 + 5 ) + - 4 6 1. 1- , 5 ) . - 6 ; * ) 4 4 1- 4 2 - 4 . : * 4 - + ) 4 , 6 , 4 ) 9 1 / , # ! " ! ' $ ' = @ A E . H = ? A > O - ? = H @ J5 ) 5 . $ & ! $ 5 K J
4 <strong>SRI986</strong> MI EVE0102 A-(en)FUNCTIONThe positioner operates according to the force comparisonprinciple:The input current signal w flows through moving coil 51,which is located in the field of a permanent magnet 52 .The resultant force exerts a torque on the balance arm53 .This leads to a change in the distance between nozzle54 and cone 55 which results in a changein the back pressure at the nozzle. The Venturi 56,which is supplied with air, converts the back pressureinto the pressure signal w’ which is fed to thecompensator 57.An equilibrium of forces is set at balance arm 53 if thetorque produced by moving coil 51 is equal to thetorque reaction produced by compensator 57.At the same time the pressure signal w’ is passed tothe input diaphragm 58. The stroke of the inputdiaphragm is transferred to the flapper lever 40.Theresultant change in the distance between the nozzle59 and the flapper 60 alters the back pressure at thenozzle. This pressure acts in a single-acting positioneron an amplifier 61. Its output pressure y results in astroke movement of diaphragm actuator with springresetting (see Fig. 2).In the double-acting positioner this pressure acts ona double-acting amplifier 62 , where opposed outputpressures y 1 and y 2 cause a stroke movement in thediaphragm actuator without spring resetting (see Fig.3).The stroke movement is tapped at the actuator spindle63 of the feedback lever 11 and transferred to thestroke factor lever 17.The stroke factor lever 17 and the flapper lever 40 areconnected by the range spring 43 .Equilibrium of forces is set at the flapper lever 40 if thetorque produced at the input diaphragm 58 is equal tothe torque reaction of the range spring 43 produced bythe stroke setting. Thus an actuator settingproportional to the signal input is retained constantly.A dynamic adaption to the actuator (sensitivity,stability) can be accomplished by the throttling screw44 and the damping throttles 46 , 47 and 48 in thedouble-acting positioner, the stroke range and zeropoint are set via the zero screw 41 and the strokefactor screw 42 .A rising or falling actuator pressure at rising inputsig-nal is set in the single-acting positioner by meansof the changeover plate 13 . K K BJ5 K F F O = EH# "" !# '$ ! %# #Fig. 2: Single-acting electro-pneumatic positioner# !# ## !# ## $$ !# $ K K BJ5 K F F O = EH$ !" " !# '$ %# &" # " # ## &# %" $$ K K BJ5 K F F O = EH" "" "# %" %" &$ K K BJ5 K F F O= EH" "" "Fig. 3:Double-acting electro-pneumatic positioner
MI EVE0102 A-(en) <strong>SRI986</strong> 5ADDITIONAL EQUIPMENTThe air output capacity can be significantly increased,and the positioning time shortened to 1/4 or 1/7, bymeans of an additional single-acting or double-actingvolume booster.By means of a total of five range springs the positionercan be matched to nearly all operating situations, suchas up to 4-way (or with 4 to 20 mA up to 3-way) rangesubdivision, very high and very short strokes andangles of rotation or special cams. A standard rangespring FES 628/1 is installed. Other range springs areavailable (see page 16)For attachment to rotary actuators and rotary armaturesan attachment-kit for rotary movement (CodeEBZG-PN, -NN, -JN, -ZN) is required.Fig. 4: Single-acting positioner with volume boosterFig. 7: Housing of the attachment kitfor rotary movementThe inductive limit switch assembly (Code P, Q, R, T,V, see page 23) enables position signaling, e.g. endposition signaling .If ¼-NPT connections are desired, the connectionmanifolds Code LEXG-BN, -CN must be used.The connection manifold 2 Code LEXG-CN isrequired for piping up to 10 mm ∅, the connectionmanifold 3 Code LEXG-BN for up to 12 mm ∅.2 3Fig. 8: <strong>Positioner</strong> with inductive limit switch assemblyFig. 5: Connection manifoldsIf an indication of actuating pressure and supply airpressure is desired for single-acting and double-actingpositioners, a connection manifold with gauges (CodeLEXG-JN, -MN, -RN) can be used.The electrical position transmitter assembly (Code E orF, see page 26) converts the stroke or angle of rotationinto an electrical standard signal 4 to 20 mA.Fig. 6: Connection manifold with gaugesFig. 9:<strong>Positioner</strong> with electrical position transmitterassembly
6 <strong>SRI986</strong> MI EVE0102 A-(en)2 MOUNTING2.1 Dimensions2.1.1 <strong>Positioner</strong> # #" #$ !" &'! #!!$$ # ## & & #% ! E " = N ! '& !# # !" $%# " #" ' #" '! ' # "& ! # " #" # & ! #" ' ' ! $"' " & % & %$ % & ' $ % & ! 1 Screwed gland Pg 13.5 (line entry)2 Dummy plug. Can be replaced with 13 Earth connection4 Earth connection5 Terminals (+/–) for signal input (w)I Ø = Correcting variable 1 (Output)Ú = Supply airII Ø = Correcting variable 2 (Output)(only on double-acting positioners)6 Internal thread G 1 / 8 for output II (y2)(only on double-acting positioners)7 Internal thread G 1 / 8 for supply air8 Internal thread G 1 / 8 for output I (y1)9 Feedback lever10 Housing coverScrew on the housing cover in such a waythat the air vent of the attached devicefaces downwards !2.1.2 Booster, single-acting; Code VKXG-FN E ? D& &! " $' ! # &For comments see opposite sheet.
MI EVE0102 A-(en) <strong>SRI986</strong> 72.1.3 Booster single-acting withincreased air output; Code VKXG-HN# $& %! " ! "" ' &" #2.1.4 Booster double-actingCode VKXG-GN"!$& #! ! # "" '& !! %2.1.5 Connection manifold Code LEXG-BN" !"& &! " $!& &! " $$$! &2.1.6 Connection manifold Code LEXG-CN2.1.7 Connection manifold with gaugesCode LEXG-JN, -MN, -RN! && # & # 1 Internal thread ¼-18 NPT for supply air2 Internal thread (not used)3 Internal thread ¼-18 NPT for output I4 Internal thread ¼-18 NPT for output II5 Internal thread ½-14 NPT for output I6 Mounting screws SW177 Internal thread ¼-18 NPT for output II(Connection manifold Code M only)8 Code LEXG-MN: gauge for output ICode LEXG-JN : without gauges9 Code LEXG-MN: gauge for supply airCode LEXG-JN : gauge for output10 Code LEXG-MN: gauge for output IICode LEXG-JN : gauge for supply air '&" ! # %!$% % $ %"
8 <strong>SRI986</strong> MI EVE0102 A-(en)2.2 Attachment kit for diaphragm actuatorsacc. to DIN IEC 534-6 (NAMUR)The attachment kits include the following parts:EBZG-KN:EBZG-HN:Mounting bracket 10 Mounting bracket 10Feedb. lever EBZG-AN Feedb. lever EBZG-AN 11Carrier bolt 12 Carrier bolt 12U-bolts 14 Mounting screw 192.2.2 Determination of mounting sideSingle-acting diaphragm actuatorsCheck whether the actuator is in the safety positionrequired by the process.(Does the actuator open or close with spring force?)The mounting side is selected from the table below inaccordance with the direction of action and the requireddirection of movement of the spindle for an increasinginput signal.) ? JK = J H? I A IM EJD I F HE C B H? A+ D = C A L A HF = JA I A JJE C) ? JK = J H F A IM EJD I F HE C B H? A+ D = C A L A HF = JA I A JJE C2.2.1 DimensionsMounting bracket 10 Code G" ! $ '" ! $ ' E ? D# # # '' ! # "The arrow indicates the direction of movement of thespindle at increasing input signal.The direction of action of the input signal can be set onthe changeover plate 13 (see page 31):N = Normal direction of action (increasing input signalproduces increasing control pressure to theactuator)U = Reverse direction of action (increasing input signalproduces decreasing control pressure to theactuator)# % '! $ " " & !! %' ! # &%& ! " "# # ! '% & " !Feedback lever 11 with compensating spring 16Code EBZG-ANCode EBZG-BN5 9 Double-acting diaphragm actuatorsFor double-acting positioners the changeover plate 13always stays in the “N” setting. The assignment of theinput signal to the direction of movement of theactuator spindle is determined by the selection of themounting side of the positioner and the piping of thepositioner outputs to the actuator:If the actuator spindle is to ascend with an increa-singinput signal, output y 1 is connected at top of theactuator and output y 2 is connected at bottom.The positioner is mounted at the right-hand side.If the actuator spindle is to retract with an increasinginput signal, output y 1 is connected at bottom andoutput y 2 at top of the actuator.The positioner is mounted at the left-hand side.+ D = C A L A HF = JA I A JJE C+ D = C A L A HF = JA I A JJE CCarrier bolt 12 $% & #! $ ## $ ! 'The arrow indicates the direction of movement of thespindle with an increasing input signal.
MI EVE0102 A-(en) <strong>SRI986</strong> 92.2.3 Attachment to diaphragm actuatorsAttachment of the positioner is made using theattach-ment kit for diaphragm actuators according toDIN IEC 534-6 at right or left-hand side of the actuator.$ ! ## 'a) Screw the carrier bolt 12 into actuator coupling(see Fig. 12).b) Screw mounting bracket 10 flush with the positionerwith two M 6 socket head cap screws (5 mmA/F).c) Fasten positioner with mounting bracket 10 to thediaphragm actuator.For FOXBORO ECKARDT diaphragm actuatorswith cast yokes:fasten mounting bracket 10 with screw 19 to thethreaded hole in the cast yoke (see Fig. 10).This ensures that the feedback lever 11 is horizontalat 50 % stroke.For diaphragm actuators with pillars:fasten mounting bracket 10 with two U-bolts 14 tothe pillar in such a manner that feedback lever 11which is loosely attached to the shaft 15 of thepositioner and the carrier bolt 12 , is horizontal at50 % stroke (see Fig. 11).d)Setactuatortoa0%strokeposition.Attach feedback lever 11 to shaft 15 of thepositioner and carrier bolt 12 in such a mannerthat compensating spring 16 is above the carrierbolt 12 when the mounting side is on the right, orbelow the carrier bolt 12 when the mounting sideis on left (see Fig. 9).Align and lock carrier bolt.e) Press stroke factor lever 17 against stop screwand create a frictional connection between thefeedback lever 11 and shaft of the positioner bytightening hexagon cap screw (10 mm A/F) offeedback lever.f) Connect positioner output y 1 to diaphragm actuatorfor single-acting diaphragm actuators and connectoutputs y 1 and y 2 to diaphragm actuator fordouble-acting diaphragm actuators.g) Set up electrical connections.h) Connect supply air of min. 1.4 bar to max. 6 bar,but no more than the maximum permissibleoperating pressure of the diaphragm actuator.i) Fasten housing cover in such a way that airvent of attached device faces downwards(see Mark ‘M‘ in Fig. 12).M E ? DFig. 10:Fig. 11: # "" # # # ' # #" #Attachment to diaphragm actuator withcast yokes according to DIN IEC 534-6(mounting side right) Code G ! #% ' ! & " $ ! ## " ! $ ' # "" # # # ' # #" #Attachment to diaphragm actuator withpillarsaccording to IEC 534-6(mounting side right) Code F111216Fig. 12:Take-off point of the positioner(mounting side left)
10 <strong>SRI986</strong> MI EVE0102 A-(en)2.3 Attachment kit for rotary actuatorsFor attachment of the positioner to rotary actuatorsor rotary armatures an attachment kit is required. Thelinear cam enables sensing of rotation anglesup to 120°, wheras the equal percentage and theinverse equal percentage cams sense rotation anglesup to 90° (linear characteristic between 70° and 90°).2.3.1 Version with shaft(acc. to VDI/VDE 3845) Code EBZG-ZN ! $ ## ! %! E ? D$ #" $ $ N " N , 1 ' " # & "# #& # $ N ! N , 1 ' " $ ! ## !&! $# !2.3.2 Version with flange Code EBZG-JN$ ! $ % $ #$ ' #% #' # ! '" %# ' %$ # $$ #" $ $ N " N , 1 ' % % $# $ N ! N , 1 ' Rotation angle max. 120°;torque requirement 0.14 Nm# " !" % & #& $! ! '$ " ! '$ !" &
MI EVE0102 A-(en) <strong>SRI986</strong> 112.3.3 Version without flangeCode EBZG-NN, -PN E ? D " ! ! $ ## ! % #$ #" $ $ N " N , 1 ' # # ' ! & $ N ! N , 1 ' " % $$ ! $ " # # # # $ Adaptation of the actuator drive shaft andcorrect axial location required at site!2.3.4 Housing dimensions of attachmentkits for rotary actuators" ! $ '' #! % "For all versionsCode EBZG-NN# ' % $$ # $ " $# # "" ! $ '' #! % "$ "#$ "#" %' '! ' $ 0 &$ ! $ %$ # %" # % % " %For version without flangeCode EBZG-PN& & % %' '! ' $ # % $ %$ # %
12 <strong>SRI986</strong> MI EVE0102 A-(en)2.3.5 Attachment to rotary actuatorsa) Remove the transparent cover plate from the housingof the attachment kit.b) Mount the housing of the attachment kit on rotaryactuator or armature; use mounting hardwaresup-plied by the actuator manufacturer ifnecessary." K K BJ5 K F F O = EHFig.13: Rotary actuator with attachment kit for rotaryactuatorsFig.15: K K BJ5 K F F O = EHRotary actuator with attachment kit for rotarymovement and double-acting positionerc) Move actuator into the desired starting position(rotation angle = 0°).d) Mount cam 24 in accordance with the directionof rotation of the actuator (see Fig. 14).The linear cam is fastened to the actuator driveshaft in such a manner that the dimension x or y(Fig. 15) amounts 2 mm, whereasin case of equal percentage cam the dimension xis approx. 17.5 mm, and the dimension y is approx.21.5 mm.In case of inverse equal percentage cam thedimension x is approx. 18 mm, and the dimensiony is approx. 23 mm.When employing equal percentage and the inverseequal percentage cams, the range spring FES627/1 must be installed in the positioner.e) Fasten feedback lever 30 for the rotary actuatoronto shaft 15 of positioner as shown in Fig. 16. #! ) K JE C F I EJE B H= ? JK = J H H J= JE * K JE C F I EJE B H= ? JK = J HH J= JE )"*Fig. 16:Attaching feedback lever to the positionerf) Mount positioner on housing of attachment kit.Attach spring 31 to feedback lever 30 and camfollower 32 against cam (see Fig. 17).E A = H"")*)*!A G K = F A H? A J= C AE L A HI A A G K = F A H? A J= C A! ! Fig.14: Mounting position of the cams 24Fig.17: Attachment of positioner to rotary actuator.Alignment of cam
MI EVE0102 A-(en) <strong>SRI986</strong> 13Screw positioner to housing of attachment kit. Withthe linear cam and the inverse equal percentagecam check whether mark 33 points to the center ofthe cam follower 32 (see Fig. 18); adjust ifnecessary.With the equal percentage cam check whether thecam follower lies directly ahead of the start of thecam lobe; adjust if necessary.g) Final mounting of feedback lever on shaft ofpositioner is performed at a stroke of 0 %, i.e. arotation angle of 0°. First loosen 5 mm A/F Allenscrew of feedback lever 30 through hole 34 (seeFig. 19), then press stroke factor lever 17 againststop screw 18 (see page 31) and tighten Allenscrew firmly.h) With single-acting actuators connect positioner outputy 1 to actuator; with double-acting actuatorsconnect y 1 and y 2 to actuator.Connect chamber in which pressure is to built upwith an increasing input signal to y 1 .i) Connect command variable w (input).k) Connect supply air of min. 1.4 bar to max. 6 barbut do not exceed the maximum permissibleoperating pressure of the actuator.Note !If actuator moves to an end position, the mountingposition of cam does not coincide with the direction ofrotation of the actuator.In this case install the cam 24 in the reverse position.)"*)"*I) Attach pointer 35 on the headed screw in such amanner that 0° is indicated when the rotaryactuator is in its starting position (w = 0).m)Attach the transparent cover plate (see Fig. 20).! ! !E L A HI A A G K = F A H? A J= C A! ! !E A = H)"*A G K = F A H? A J= C A! #Fig. 18: Alignment of cam 24Fig.20:Attachment of pointer 35 andtransparent cover plateFig. 19:Tightening feedback lever2.3.6 Reversing direction of rotationSingle-acting actuator:move changeover plate (page 31, item 13) to ‘U"setting and reverse cam 24 .Double-acting actuators:exchange positioner outputs and reverse cam (seeFig. 15). The changeover plate (page 31, item 13)remains in ‘N" setting.
14 <strong>SRI986</strong> MI EVE0102 A-(en)3 ELECTRICAL CONNECTIONSDuring installation, the installation requirements by DINVDE 0100 and/or DIN VDE 0800, as well as locallyapplicable requirements must be observed.In addition, the requirements of VDE 0165 must beobserved for systems associated with hazardousareas.Further important instructions are contained in page 22(safety requirements, explosion protection).If an earth connection or potential equalization arerequired, the appropriate connections must be set upfor an internal earth connection 36 or an external earthconnection 37 .The units must be operated in a stationary position.The line (cable) is guided through a screwed gland 7Pg 13.5 . This is suitable for line diameters of 6 to 12mm.The electrical connections for the command variable wis made at the + and – screw terminals 38 , which aresuitable for wire cross-sections of up to 2.5 mm² (seeFig. 21).Check polarity !38 36 384 START-UPBefore commissioning electro-pneumatic positionersmust be matched to the stroke and rotation angle ofthe actuator and to the input signal range.The instruments can be connected to the 0 to 20 mAinput signals, 4 to 20 mA input signals or split rangeswithout altering the basic adjustments.The supply air connected should be min. 1.4 bar andmax. 6 bar, but should not exceed the maximum operatingpressure of the diaphragm actuator.4.1 Setting the gainThe gain and thus the sensitivity of the positioner areset by means of the throttling screw 44 (see page 31).The throttling screw is screwed in all the way in thefactory, i.e. it is set to maximum gain. This gain varieswith the supply air pressure, as shown in the followingtable:Supply airSingle-actingpositionermax. gainDouble-actingpositioner1.4 bar approx. 150 approx. 1004 bar approx. 90 approx. 1506 bar approx. 60 approx. 180Fig. 21: Electrical connections7 37The linear gain is indicated. These values are basedon the built-in range spring FES 628/1.From this basic setting the gain can be matched to thedynamic requirements of the control system(counter-clockwise rotation of the throttling screw 44results in less gain).Note :The zero point must be adjusted following eachchange of gain.In order to ensure reliable pressure reduction in theactuator, the throttling screw 44 should not be openedbeyond ¼ turn at 6 bar. A limiting screw 45 istherefore incorporated.The basic setting at the factory permits a maximumopening of the throttling screw 44 of approx. 1 turn.
MI EVE0102 A-(en) <strong>SRI986</strong> 154.2 Setting of zero point and stroke(see page 31)Before commencing settings press the flapperlever 40 several times alternately to the left andright in order to align the flappers correctly.a) Set the minimum value of the command variable w(start of stroke).b) Turn zero screw 41 until actuator just begins tomove from its end position.Note:In accordance with VDI/VDE 2174 a variation ofthe stroke range up to2%ispermissible in one ofthe two end positions. It is advisable to takeadvantage of this tolerance for the input signalrange 0 to 20 mA by elevating the minimum valuesomewhat above 0 mA (approx. 0.1 mA; max. 0.4mA). This will ensure that the actuator completelydecompresses if necessary for safety reasons.c) Set maximum value of the command variable w(end of stroke).d) Turn the stroke factor screw 42 until actuatorprecisely reaches its end position:Right turn: decrease of travelLeft turn: increase of travelRecheck zero and stroke settings.Note:When stop screw 18 is correctly positioned andfeedback lever is correctly mounted, there is nointeraction between the adjustments of zero andstroke.If the stroke cannot be adjusted with the installedspring, the correct spring can be approximatelydetermined in accordance with the following criteria:4.3 Setting the damping(see page 31)The air output capacity of the positioner can be reducedby means of the damping throttle 46 . Doubleactingpositioners are equipped with a damping throttle47 for correcting the variable y1 and a dampingthrottle 48 for correcting the variable y2 .In its normal setting the damping throttle is approximatelyflush with the amplifier housing.The air output capacity is reduced by a factor ofapproximately 2.5 when the damping throttle is turnedcompletely in.A reduction of the air output capacity should only bedone for very small actuator volumes since the controlsystem would otherwise be too slow.Page 31, single-acting positioner:Setting gain 44 and damping 46Page 31, double-acting positioner:Setting gain 44 and damping 47, 484.4 Subdivision of input range(split range)If several actuators are to be controlled by the samecommand variable and the complete stroke is to beexecuted in only one specific subrange of this commandvariable at a time, a positioner, the zero pointand stroke range of which must be set to the desiredsub-range of the command variable, must be providedfor each actuator.For actuation of several positioners by a mastercontroller the positioners are connected in series.Upper end position requires softer springwith higher number of turns(for large strokes and “split-range”)corresponds to curve (1-5) b(see page 17)Stroke range of existing springcorresponds to curve (1-5) aLower end position requires harder springwith fewer turns(for shorter strokes and equal percentage cam)There are 5 differently rated springs available formatching the stroke and input signal range.The particular spring required can be determinedprecisely via stroke factor U x .Fig. 22: Example of 2-way split rangeIt should be noted that the permissible load of thecontroller may not be exceeded. The input resistanceof the positioner at 20 °C is approx. 200 ohms.Selection of the correct range spring can be made inaccordance with the stroke factor range or the graph ofthe range springs (see page 17).
16 <strong>SRI986</strong> MI EVE0102 A-(en)If the zero point has to be increased by more than 10mA in case of multiple subdivision the adjustmentmust be made as follows: (see page 31)a) Shut off supply air.b) Remove tension from range spring 43 by turningzero screw 41 .c) Loosen hexagon cap screw (A/F 10) of feedbacklever and turn stroke factor lever 17 away fromstop screw 18 . This applies pretension to rangespring 43 . In this position retighten hexagon capscrew of feedback lever.d) Connect supply air.e) Set the minimum value of command variable w(start of stroke).f) Turn zero screw 41 , until the actuator begins tomove from its end position. If this is not possible,the pretension of the range spring must beincreased as described in c).g) Set maximum value of command variable w (endof stroke).h) Turn stroke factor screw 42 until the actuatorprecisely reaches its end position.4.5 Determination of rotation anglefactor UϕIn conjunction with the attachment kit for rotaryactuators (Code P, M, J, Z, R) the rotation angle factorUϕ can be determined as follows:ϕRotation angleUϕ ==∆ w Input signal range [ mA ]The rotation angle factors Uϕ of the individual rangesprings are stated in the following table.The rotation angles are also taken into account in thegraph of the range springs (see page 31).4.6 Determination of stroke factor U XThe stroke factor Ux is the ratio of the entire range ofthe output variable (stroke x) to the entire range of theinput variable (command variable w).For FOXBORO ECKARDT diaphragm actuatorsPA200 to PA700/702 :xU x ==∆ wStroke in mmInput signal range in mANote !With this setting the zero point and stroke range aremutually dependent. Settings e) to h) must thereforebe repeated as often as necessary until both settingsare correct. Furthermore it should be noted that thedeflection of the stroke factor lever 17 from the startingposition may not exceed a maximum of 39°, since thestroke factor lever might otherwise hit the housingcover before reaching its end value.For FOXBORO ECKARDT diaphragm actuators(1500 cm 2 ) and actuators of other manufacturers(I o = 117.5 mm 1) ):xI oU x =×∆ wI sI s = Feedback lever length in mm (for FOXBOROECKARDT actuator 1500 cm 2 : I s = 122.5 mm)The stroke factor can be used to determine for eachapplication whether or with which spring the desiredsetting can be made.Five different range springs are available for matchingto the stroke and input signal range.Range spring Cam 1) Stroke factor rangeIdent No. old ID Colour1 420 493 013 FES 627/1 yellow2 420 494 019 FES 628/1 green3 502 558 017 FES 612/1 - whitout -4 420 496 011 FES 715/1 gray5 420 495 014 FES 629/1 blueEqual perc.linear And inverseequal perc.max. 120° max. 90°1.7 ... 4.7(max. 7.0)3.5 ... 9.5(max. 14.0)5.8 ... 14.5(max. 21.75)8.4 ... 21.5(max. 32.75)11.5 ... 27.5(max. 41.5)2.4 ... 8(max. 10)5.0 ... 15(max. 20)8.2 ... 24(max. 28)12.0 ... 35(max. 43)-Stroke factor U xmmmA0.4 ... 1.2(max. 1.7)0.85 ... 2.3(max. 3.35)1.4 ... 3.5(max. 5.25)2.0 ... 5.5(max. 7.9)2.75 ... 7.0(max. 10.0)Strokerange 2)1) For equal percentage and inverse equal percentage cams the rotation angle factors are a function of their corresponding rotation angles.2) Included in FESG-FN (Ident-Nr. 420 496 011)mmRemarks8 ... 34 2)17 ... 68 built-in28 ... 105 2)40 ... 158 3) 2)55 ... 200 3) 2)
MI EVE0102 A-(en) <strong>SRI986</strong> 174.6.1 Stroke factor ranges of the range springsThe stroke factor U x determined as described aboveshould lie within the ranges of the respective rangesprings indicated in the following table, as close aspossible to the lower value.4.6.2 Characteristics of the range springsThe stroke x o is based on the FOXBORO ECKARDTstandard feedback lever I o =117.5 mm.1I = N "# # ' c) Enter intersection w/x o .6 H= L A 1I E % & !1 % #" $ Fig. 23: Feedback leverIf another length (l s ) is used, the actual stroke x s mustbe converted to stroke x o117.5 ⋅ x sx o =[mm]I sSelection of measuring spring and setting ofmeasuring spanDetermination of suitable spring for split range:a) Enter desired setpoint value w for travel start in thediagram field.b) Determine x o if I s unequal 117.5 mm.d) Connect points determined at a) and c). This resultsin a straight line.e) If the straight line does not run through the origin,move this parallel here.f) Use the spring the characteristic line (a) of which islocated directly below the presently determinedcharacteristic line.Example (shown in graph)Split range operationValve 1:w = 0 ... 10 mAx s = 30 mm (stroke range)I s = 140 mmx o =117.5 ⋅ 30 =25.2mm140Intersection w = 10 mA with x o = 25.2 mm → S 1Selected: Spring 4 (FES 715/1) because the characteristiccurve based on the beginning of the determinedstraight line located directly below.Valve 2:w = 10 ... 20 mAx s = 50 mm (stroke range)I s = 140 mmx o =117.5 ⋅ 50140=42mmIntersection w = 20 mA with x o =42mm→ S 2Selected: Spring 5 (FES 629/1) because the characteristiccurve based on the beginning of the determinedstraight line located directly below.5 A JF E JLifting up of zero point for 4 ... 20 mA and split range1a, 2a, 3a, 4a, 5a = stroke starting of the respective spring1b, 2b, 3b, 4b, 5b = max. stroke1) I o = FOXBORO ECKARDT standard feedback effective length2) For feedback effective length I s = 117.5 mm and ∆ w=20mA3) Theoretical value
18 <strong>SRI986</strong> MI EVE0102 A-(en)5 MAINTENANCE5.1 Basic Adjustment of Single-acting<strong>Positioner</strong> (pneumatic part)Basic setting is only necessary after dismantling thedevice or changing modules.All the settings for adapting the positioner to theactuator are described in page14 (start-up).Note:If alterations were made to the I-p converter 65 (seeFig. 30), this must also be adjusted (see page 20).The following tools are required for basic adjustment:screwdriver1 open-end spanner 7 mm A/F1 feeler 0.6 mm1 test gauge 1.6 bar1 DC signal generatorThe feedback lever must be detached from the shaft ofpositioner if adjustment is done in the attached state.For the following adjustments see pages 30 and 31.a) Set changeover plate 13 to “N”.b) Turn throttling screw 44 to the right as far aspossible (maximum boost).c) Unhook range spring 43 from flapper lever 40 .d) Check whether the flappers 60 are concentric withthe nozzles 59 . If not, align booster 61 .Thefastening screws of the booster are accessibleafter removing the I-p converter (see 5.3.1).e) Push flapper lever 40 alternately to the left andright several times to align the ball-guided flappersparallel to the nozzles.f) Push flapper lever 40 to the left. By turning thehexagonal rod 66 7 mm A/F set the distancebetween the right-hand nozzle and the right-handflapper to approx. 0.6 mm with the aid of a feeler.Then fasten the hexagonal rod tight.g) Connect the positioner as shown in the test circuit,fig. 24, preset supply air to 1.4 bar.h) Press flapper lever 40 to the left. If the output ydoes not rise to supply air pressure, there areleaks or the flapper is not correctly positioned(repeat ‘e’).i) Hook range spring 43 into flapper lever and presetDC signal w = 10 mA. Proceed as follows to makezero setting independent of the stroke setting:k) Press stroke factor lever 17 against stop screw 18 .I) Set a large stroke factor (approx. 2 mm in front oftop stop) with stroke factor screw 42 .m)Set zero screw 41 so that the output pressure y =approx. 0.6 bar and note this value.n) Set a small stroke factor (approx. 2 mm in front ofbottom stop) with the stroke factor screw.The output pressure y may not change by morethan ±150 mbar in relation to setting m).o) The stop screw 18 should be adjusted in case ofgreater deviations. Repeat settings l) to n) afterevery adjustment of the stop screw 18 until thedeviation is less than ±150 mbar.p) Secure stop screw 18 with varnish. Putchangeover plate 13 back in its original position.Reinstall positioner or reattach the feedback levertopositioner shaft.See page 14 for start-up.Fig. 24: K K BJ5 K F F O = EH, + )Test circuit for single acting positioner
MI EVE0102 A-(en) <strong>SRI986</strong> 195.2 Basic Adjustment of the Doubleacting <strong>Positioner</strong> (pneumatic part)Basic setting is only necessary after dismantling thedevice or changing modules.All settings for adapting the positioner to the actuatorare described in page 14 (start-up).Note:If alterations were made to the I-p converter 65 (seeFig. 30), this must also be adjusted (see page 20).The following tools are required for basic adjustment:screwdriver1 open-end spanner 7 mm A/F1 feeler 0.6 mm2 test gauges 6 bar1 DC signal generatorThe feedback lever must be detached from the shaft ofthe positioner if adjustment is done in the attachedmode.For the following adjustments see pages 30 and 31.a) Leave changeover plate 13 set to “N”.b) Turn throttling screw 44 to the right as far aspossible (maximum boost).c) Unhook range spring 43 from flapper lever 40 .d) Check whether flappers 60 are concentric withnozzles 59 . If not, align booster 61 . The fasteningscrews of the booster are accessible after removingI-p converter (see 5.3.1).e) Push flapper lever 40 alternately to the left andright several times to align ball-guided flappersparallel to nozzles.f) Push flapper lever 40 to the left. By turning thehexagonal rod 66 7 mm A/F set the distancebetween the right-hand nozzle and the right-handflapper to approx. 0.6 mm with the aid of a feeler.Then fasten hexagonal rod tight.g) Connect positioner as shown in the test circuit, fig.25, preset supply air to 6 bar.h) Press flapper lever 40 to the right and left. Thepressures y 1 and y 2 must change in oppositionbetween 0 and supply air pressure.i) Hook range spring 43 into flapper lever and presetDC signal w = 10 mA.k) Set zero screw 41 so that pressures y 1 and y 2 areequal.I) Set adjustment screw 67 so that pressures y 1 andy 2 are set to approx. 4.2 bar (70 % of the supply airpressure). Repeat settings k) and l) alternately ifnecessary.m)Preset 1.4 bar supply air.Set zero screw 41 so that pressures y 1 and y 2 areequal. They should be approx. 0.7 bar (50 % ofthe supply air pressure) (check measurementonly).Proceed as follows to make the zero setting independentof the stroke setting:n) Press stroke factor 17 lever against the stop screw18 .o) Set a large stroke factor (approx. 2 mm in front ofthe top stop) with the stoke factor screw 42 .p) Set the zero screw 41 so that output pressures y 1and y 2 are equal.r) Set a small stroke factor (approx. 2 mm in front ofthe bottom stop) with the stroke factor screw. Theoutput pressures y 1 and y 2 may not change bymore than ±150 mbar in relation to setting p).s) The stop screw 18 should be adjusted in case ofgreater deviations. Repeat settings o) to r) afterevery adjustment of stop screw 18 until thedeviation is less than ±150 mbar.t) Secure stop screw 18 with varnish.Reinstall the positioner or reattach the feedbacklever to positioner shaft.See page 14 for start-up.Fig. 25: K K BJ5 K F F O = EHTest circuit for double acting positioner, + )
20 <strong>SRI986</strong> MI EVE0102 A-(en)5.3 Checking and Adjusting I-pConverter(see also page 31)Note:Press the flapper lever 40 to the left to check whethera prevailing malfunction was caused by the I-pconverter or by the pneumatic part. If the outputpressure (y 1 ) rises to the supply air pressure, themalfunction should be looked for in the I-p converter.5.3.1 Removal of I-p converter (see Fig. 30)a) Unscrew housing cover 68 .b) Unscrew shaft 69 with the 5 mm A/F Allen key(turn to left), unhook range screw 43 and removestroke factor lever 17 .c) Unscrew 4 cylinder head screws 70 and removeair vent plate 71 .d) Unscrew the two Allen screws 72 (3 mm A/F) andremove the I-p converter 65 .5.3.2 Check and adjust I-p converter(see Fig. 28)An adapter is required for checking and adjusting theI-p converter which can be done by yourself as shownin Fig. 26.The following tools are required:screwdriver,3and5mmA/Fallenkeys,1 test gauge 0 to 1.4 bar,1 DC signal generator 0 to 20 mA,supply air 1.4 ± 0.1 bar.a) Connect the I-p converter to the adapter, Fig. 26and wire as shown in Fig. 27.b) Preset supply air 1.4 ± 0.1 bar.c) The test gauge must read 0.18 to 0.19 bar atcurrent signal 0 mA. Otherwise set the adjustmentlever 73 so that this value is indicated. If this is notpossible, remove the Venturi 56 (see Fig. 29) andclean it.d) Increase the current signal slowly from 0 to 20 mA.The test gauge reading must changeproportionately to the current signal.5.3.3 Clean the Venturi (see Fig. 29)a) Remove I-p converterb) Unscrew two screws 74 , remove the cover plate75 and Venturi 56 .c) Clean the Venturi 56 with compressed air and abrush.d) Reinsert the Venturi. Tighten the two screws 74equally. If the base plate 76 has also beendismantled, take care that the 3 O-rings and thefilter are correctly positioned.e) Check I-p converter and adjust, if necessary.5.3.4 Insert I-p converter and assemble the device(see Fig. 30)a) Attach the I-p converter 65 . Make sure that theelectric lead is located along the bottom of the I-pconverter in the appropriate channel and that bothO-rings are in place.b) Screw on air vent plate 71. Put the electric lead 77around the shaft of the positioner 69 in such a waythat the functioning of the I-p converter is notimpaired.c) Hook in range spring 43 and screw shaft 69 tostroke factor lever 17 .d) Screw on the housing cover 68 so that the air ventof the attached device faces downwards.Note:Basic adjustment and re-start-up (see page 14) arenecessary after dismantling the device or afterreplacing components or modules.Current signal0mA20 mATest gauge reading0.18 ... 0.19 barapprox. 1 barIf these values are not achieved, there is a defect andthe I-p converter should be replaced or the positionerreturned to the manufacturer for repair.
MI EVE0102 A-(en) <strong>SRI986</strong> 21& $% % # ! '! #'# ' $$ '% " " > = H K JF K J " )1F ? L A HJA HM EJD= @ = F JA H! !5 K F F O = EH & %5 K F F O = EH " > = HD I A I? A ? JE I&! " # $ ! E ? D# 'Fig. 26:Test adapter for I-p converterFig. 27:Test circuit for I-p converter% !% $# $% #% "Fig. 28:Adjustment of the I-p converterFig. 29:Removal of the Venturi$ $ '$ '$ &% % % $ # % % %Fig. 30: Removal and reassembly of the I-p converter 65 and the booster 61
22 <strong>SRI986</strong> MI EVE0102 A-(en)5.4 Cleaning throttlesa) Remove the limiting screw 45 .b) Remove the throttling screw 44 from the limitingscrew from below.c) Clean the throttling screw 44 in a solvent (e.g.benzene) and then carefully blow through.Cleaning in an ultrasonic bath is better still.d) Screw in throttling screw 44 completely again to itsstop (clockwise).e) Screw in limiting screw 45 completely to its stop(clockwise), then unscrew by approx. one half turncounterclockwise.f) Secure the limiting screw 45 with sealing paint.6 BOOSTER REPLACEMENTa) Remove I-p converter.b) Unscrew the booster 61 from the air vent plate.c) Screw on the new booster.To exchange a single-acting booster by adouble-acting one, you have to unscrew thesealing screw 78 first. Remember the O-ringsbetween the booster 61 and the air vent plate(single-acting positioner four O-rings, double-actingpositioner six O-rings).Before tightening the mounting bolts align booster61 in such a manner that the flappers 60 areconcentrically opposite the nozzles 59 .d) Insert I-p converter and assemble the device.7 SAFETY REQUIREMENTS7.1 Accident preventionThis device complies with the regulations for theprevention of accidents Power-Driven Work Aids(VBG 5) of October 1st, 1985.7.2 Electrical safety7.2.1 General requirementsThis device fulfils the requirements stipulated inIEC 1010-1, Class III equipment.When the housing is open, repair and maintenanceoperations must always be carried out by servicepersonnel if any power sources are connected to thedevice.The device contains no built-in fuses. Protectionagainst shock must be provided in the system forClass I equipment.7.2.2 Regulations for ConnectionThedeviceistobeusedaccordingtoitspurposeandis to be connected in compliance with its connectionplan (see section 3). The locally effective nationaldirectives for electrical installations are to be observed,e.g. in the Federal Republic of Germany DIN VDE0100 respc. DIN VDE 0800.The device may be connected to extra low voltagecircuits the insulation of which against hazardousvoltages (e.g. 220 V mains) at least meets therequirements for basic insulation.Before connection of other leads and during operationthe protective conductor must be connected to theappropriate terminal.If the connected circuits fulfill the requirementsstipulated in IEC 348 relating to the safety extra lowvoltage, the device may be operated without aprotective conductor (Class Ill equipment).7.3 Explosion protection(only if ordered specifically)The setup regulations VDE 0165 or the ElexV or thecorresponding national setup regulations must be observedwhen setting up.Attention!Observe the corresponding national requirements forrepairing explosion-protected devices.The following applies to the Federal Republic ofGermany: Repairs on parts on which the explosionprotection depends must either be done by the manufactureror must be checked by an authorized expertand approved by his test mark or a certificate.7.4 EMC and CEFor references pertaining to electro-magnetic compatilityEMC and regarding CE certification see productspecifications PSS EVE0102 A-(en).
MI EVE0102 A-(en) <strong>SRI986</strong> 238 Option “Limit switch”The limit switches are additonal equipment either installedin the factory or up-dated. They are constructedeither with inductive switches or micro switchesand signal exceeding or deceeding of a stroke or rotatingmovement of actuators.8.1 Method of operationStroke or rotation angles of the actuators are transferredto the control vanes via a deviating mechanismto the control vanes which either dampen an oscillatorcircuit or switch a mechanical contact depending onthe version.The inductive limit switches are supplied with powervia a separately mounted switch amplifier. The currentsignal is transferred into a switch output.In the three-wire version an integrated switch amplifiersupplies a switch signal; direction of reaction PNPclosing function.+ JH L = A I A A ? JH E? 5 EC = E C) ? JK = J H = @ F H > A IHA = O @ A L E? AFunctional schematic (acc. to DIN 19324 / NAMUR)We recommend the following switch amplifiers:Separating switch amplifier with relay outputPepperl+Fuchs GmbH type numbers:Normal version WE 77/Ex2Safety version WE 77/Ex-SH-03For further information see above documentation.8.2 Electrical connectionGrounding conductor connection following installationin the <strong>SRI986</strong> - see page 14.8.3 Arrangement of ConnectionThe connection cable is guided through the cablegland 12 Pg 13.5 (cable diameter 6...12 mm) andconnected to terminal bar 6 .The terminals are tied up as follows:2-wire technique 3-wire technique micro switch) *" " # # " )"# *#, +, +) * ! "The terminals are suited for cable cross-sections of upto 2.5 mm² (fine-strand).!", +)*) *" " # # N " )"# *#8.4 Start-upThe switching functions may be freely selected andset.N The control vanes may be adjusted as desired in orderto reach the wanted switching behavior. Theillustration here shows the four basic settings andadja-cent the respective switch behavior(gray=immersed vane).:)* The examples are based on the following setting:Mounting left=feedback level right; transmission isselected so that at stroke x from 0 to 100% theguid-ance shaft travels through a rotary angle of 180°.Illustrated in resting position x = 0%.2-wire technique: if control vane is immersed theinitiator power circuit becomes high-ohmic.:)*:) 3-wire technique: if control vane is immersed thecontact is closed against plus.*Micro switch: Contact opens during passing of thecontrol vanes.:) *
24 <strong>SRI986</strong> MI EVE0102 A-(en)8.5 Setting Limit ValuesThe switching points are dependent on the setting ofthe control vanes 21 , on the settings of the probes Aand B and on the ratio setting.To set the control vanes loosen the screw 22 on thedrive shaft and align the control vanes in accordancewith the illustrations on page 23.During loosening and/or tightening this screw holdcontrol vanes tightly to avoid damaging pinion andtooth segment.) *$! !""Adjust the probes as follows:a) Move the actuator to the position to be signalledb) Loosen locking screw 23 and adjust the switchingpoints by turning adjustment screws 24 .c) Then retighten locking screws.To set the transformation the ratio of the rotationangle of the control vanes can be set continuously byturning the spindle screw 25 of the adapter. Turnclockwise to increase the ratio and counter-clockwideto reduce it.Screw on housing cover with the air vent facingdownwards when the device is mounted.8.6 MaintenanceNo maintenance is required.8.7 Safety requirementssee page 29#
MI EVE0102 A-(en) <strong>SRI986</strong> 258.8 Subsequent installation or exchangeFor subsequent installation there are kits available inappropriate versions - see PSS EVE0102A.Safety measures indicated in page 29 are to be absolutelyobserved! The kit includes the following parts:1 Adapter for transferring the rotary movement tothe control vane5 Hexagonal bolts for mounting plate9 Mounting plate with probes, adjusting devices,terminals11 Bolts for housing cover12 Cable fitting13 Screw plug14 Frame with sealing# '"! "# # Installation: !a) Screw on adapter 1 :Unscrew bottom screw 2. Fit adapter 1, then screwin the screw again and tighten slightly. Holdadjusting device 3 firmly in position and unscrewtop screw 4 . Install adapter 1 and tighten thescrew again. Tighten screws 2 and 4 .b) Screw in the two hexagonal bolts 5 (SW 8):Long hexagonal bolt on the left,short hexagonal bolt on the right.c) Screw mounting plate 9 to the two hexagonal bolts5 with the zwo screws 10 (if necessary, adjust theadjusting devices so that the right-hand mountinghole is accessible). Be careful to ensure that thedriving pin of the adapter engages in the slot in thegear segment.d) Screw the two bolts 11 into the female threads tosecure the housing cover. When the positioner isinstalled, these will be the female threads in the topleft-hand corner and in the bottom right-handcorner.e) Secure cable fitting 12 and screw 13 plug toframe 14 with the enclosed nuts.Fit the frame with the rubber seal facing the positionerand cable fitting 12 at the terminals .f) Screw on the housing cover with the air vent facingdownwards when the device is mounted.
26 <strong>SRI986</strong> MI EVE0102 A-(en)9 Option “El. Position Transmitter”The electrical position transmitter is additonal equipmenteither installed in the factory or up-dated.It converts the stroke or rotary movement of anactuator into an electrical standard signal 4 ... 20 mA.! ! " 9.1 FunctionThe stroke or rotary angle of an actuator are transmittedto the position controller with a built-in electricalposition converter via control lever. The angle settingis converted proportionately into a voltage with apotentiometer. This voltage is the converted into theelectric standard signal 4 ... 20 mA. Adaption to thestroke of the actuator takes place internally. The startand end of the measuring range are set via 2 pushbuttons.$! !9.2 Electrical ConnectionsGrounding cable connection following installation in the<strong>SRI986</strong> - see page 14.9.3 Connection layoutThe cable is inserted through the M20 x 1.5 cablegland 12 (suitable for lead diameters 6 ... 12 mm) andis connected at the terminal block 6 .The terminals are suitable for wire cross-sections of upto 2.5 mm². ! $ 8 ! "2 I EJE ? L A HJA H7 5 )4 *+ A ? JA @ @ A L E? AA C HA ? H@ A H? JH A HA J? The terminals are connected as follows:31 Auxiliary energy (+)K2 Uninterrupted signal current measurement witha low resistance ampmeter (Ri ≤ 10 Ohm)32 Auxiliary energy (–)K4 Protective earth connectionThe power supply (U s = 12 ... 36 V DC) originates fromthe signal circuit in two wire connection.The maximum permissible load impedance R Bmax iscalculated with the following equation:R Bmax =(U s -12V)/0.02A [Ohm]U s = Supply voltage in V9.4 MaintenanceNo maintenance is required.
MI EVE0102 A-(en) <strong>SRI986</strong> 279.5 Setting and Start Up of positiontransmitter 4 ... 20 mAThe electronic connection of the position transmittermust be assured. Both LEDs are then light up.Adjusting the start of the measuring range (4 mA)a) Move the actuator to the starting position.b) Press push button S1 "Config Output 4 mA" longerthan 2 seconds. During this time LED 1 lights up.After 2 seconds both LEDs are light up again, thevalue for 4 mA is stored.Adjusting the end of the measuring range (20 mA)a) Move the actuator to the end position.b) Press push button S2 "Config Output 20 mA"longer than 2 seconds. During this time LED 2lights up. After 2 seconds both LEDs are light upagain, the value is stored.Random adjustment of the current values at theend pointsa) Move the actuator to the end position, where youwant to adjust the current.b) Press both buttons simultaneously for about 2seconds. Then both LEDs are alternating flashingin a slow frequency.c) With push button S1 "Config Output 4 mA" theoutput current value can be decreased and withpush button S2 "Config Output 20 mA" the outputcurrent value can be increased. Pressing thebuttons for a short moment results in a smallchange and pressing the button for a longer timeresults in a fast mode for a bigger change. Thevalue of the current can be freely decreasedbetween about 3.3 and increased up to 22.5 mA.d) Without any additional manipulations of the pushbuttons the new value is automatically saved. Aftera few seconds, the device returns into the normaloperating mode, indicated by both LEDs that arethen light up again.Trouble Shooting of the position transmitterThe components of the position transmitter are underconstant surveillance by the installed micro controller.Errors are detected and indicated when both LEDs areoff or both LEDs are parallel flashing at a fastfrequency.In the event of a fatal error, e.g. potentiometer notconnected, an output current of more then 24 mA willbe shown in addition to the error indication given bythe LEDs (fast flashing).In this case check the following:a) if the potentiometer is correctly connected to theelectronic board.b) if the potentiometer is within its working span.When both LEDs are off, the supply voltage should bechecked (minimum tension, polarity).
28 <strong>SRI986</strong> MI EVE0102 A-(en)9.6 Subsequent installationor exchangeFor subsequent installation there are kits available, seePSS EVE0102A. Safety measures indicated in page29 are to be absolutely observed!Kit components:1 Driver plate for transmitting the rotary motion5 Support Ø 7 mm for converter plate9 Converter plate with 2 fillister head screws 10and one lock washer 2011 Support for cover12 Cable screw connection13 Screw plug14 Frame with rubber sealg) Secure cable screw connection 12 and screw plug13 to frame 14 using the nuts supplied. Positionthe frame so that the rubber seal faces towards theposition controller and so that the cable screwconnection 12 is next to the terminals.h) Screw on cover 15 so that the ventilation slot is atthe bottom when the unit is attached. ' # "! "# #Installation:a) Unscrew lower screw 2 of stroke factor adjustmentfacility 3.b) Position driver plate 1, turning screw 2 again andtighten gently.c) Hold the stroke factor adjustment unit togethermanually and remove upper screw 4 . Swivel indriver plate and return screw. Tighten screws 2and 4 .d) Screw in the 2 supports 5 Ø 7 mm as follows:Longer support left, shorter support right.e) Secure converter plate 9 with screws 10 and alockwasher 20 (left screw) to the two supports sothat the pin on the driver plate 1 engages into theslot on the tooth segment.f) Screw two supports 11 into the female thread forsecuring the cover. In installation position, theseare the female threads in the top left corner and inthe bottom right corner. !
MI EVE0102 A-(en) <strong>SRI986</strong> 2910 SAFETY REQUIREMENTSFOR OPTIONSRepair and maintenance operations with open housingmay only be performed by qualified personnel if anyvoltage sources are connected to the device.The units must be used for their intended purpose andconnected in accordance with the connection diagram.The locally valid national regulations relating to settingup electrical systems must be followed, e.g. in theFederal Republic of Germany DIN VDE 0100 and DINVDE 0800.Device may be grounded upon requirement.The protective measures provided in the units canbecome ineffective if the unit is not used in accordancewith the operation instructions.Regulations for Position transmitterThe attachment of the position transmitter with the IdNo. EW 420 661 054 and EW 420 661 063 to thepositioner is to be regarded as a modification to anexplosion-protected unit and is therefore permissibleonly in accordance with the national legal regulations.The technical design of the kit is the same as that ofthe certified version of positioners with a built-in optionelectrical position transmitter.The following applies to the Federal Republic ofGermany: In accordanc with§9ElexV,theattachmentmust be certified by an approved expert.Regulations for inductive Limit SwitchThis device fulfils the requirements stipulated inIEC 1010-1, Class III equipment.The units may only be operated with safety extra-lowvoltage SELV oder SELV(E) (functional extra-lowvoltage with protective separation).Regulations for subsequent installationThe attachment of the inductive limit switch to thepositioner is to be regarded as a modification to anexplosion-protected unit and is therefore permissibleonly in accordance with the national legal regulations.The technical design of the kit is the same as that ofthe certified version of a positioner with a built-in optioninductive limit switch Type BIB663 + BIB633 K,PTB-Nr. Ex-87.B.2010.The following applies to the Federal Republic ofGermany: The attachment must be certified by anapproved expert as a modification in accordance with§9ElexV.Regulations for Limit Switch with Micro SwitchesThis device fulfills the requirements stipulated inIEC 1010-1, Class II equipment, Contamination level 2and over voltage category II.
30 <strong>SRI986</strong> MI EVE0102 A-(en)11 TROUBLESHOOTINGFault Possible causes RemediesActuator does not react<strong>Pneumatic</strong> connections switched check connectionsto the applied input signal Electrical connections switchedreverse electrical connectionsnor to a changefeedback lever loosetighten feedback lever<strong>Positioner</strong> mounted on the wrong side check mounting side see table section 2.2.2changeover plate in the wrong position check position see table in section 2.2.2booster defective Change booster (see page 6)I-p converter defectiveSee note in section 5.3 and proceedaccordinglyOutput pressure does not reach full supply pressure too lowcheck suply airvalueflappers not parallel to nozzlesalign flappers(see 5.1 d, e bzw. 5.2 d, e)pre-throttle in booster blocked clean throttle (see 5.4)I-p converter defectivesee note in section 5.3 and proceedacordinglyfilter in supply connection blocked change filterActuator runs to the end position positioner mounted on wrong side check mounting side see table in section2.2.2feedback levertighten feedback lever<strong>Pneumatic</strong> connections switched check connections(double-acting version)electrical connections switchedreverse electrical connectionsUnstable behavior -boost too high reduce boost (see 4.1)positioner circuit oscillates gland friction on valve too greatloosen gland slightly or renewfor piston actuators:reduce boost (see 4.1)static friction on cylinder too greatStroke range cannot be set range spring unsiutable change range spring (see 4.5 or 4.6)positioner does not exhaust pressurecompletelycheck supply air (max. 6 bar)check boost (see 4.1)adjust distance between nozzle and flapper(see 5.1 e, f bzw. 5.2 e, f)Detail: Nozzles/ flappers system59 60 40 66 60 59
MI EVE0102 A-(en) <strong>SRI986</strong> 31Single-acting <strong>Positioner</strong> <strong>SRI986</strong>61 46 44 45 78401370 43 18 17 42 41 7 70 37Double-acting <strong>Positioner</strong> <strong>SRI986</strong>61 44 45 47 48 67
32 <strong>SRI986</strong> MI EVE0102 A-(en)Subject to alterations - reprinting, copying and translation prohibited. Products and publications are normallyquoted here without reference to existing patents, registered utility models or trademarks. The lack of any suchreference does not justify the assumption that a product or symbol is free.FOXBORO ECKARDT GmbHPostfach 50 03 47D-70333 StuttgartTel. # 49(0)711 502-0Fax # 49(0)711 502-597http://www.foxboro-eckardt.comhttp://www.foxboro.com/instrumentation DOKT 534 043 021