Altivar 58 Telemecanique - error
Altivar 58 Telemecanique - error
Altivar 58 Telemecanique - error
- No tags were found...

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
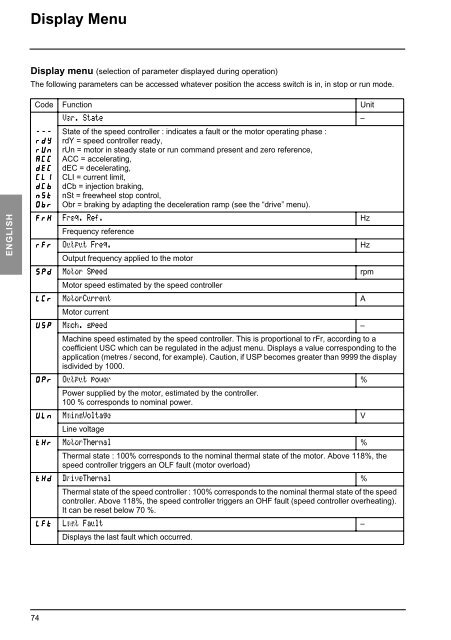
Display MenuDisplay menu (selection of parameter displayed during operation)The following parameters can be accessed whatever position the access switch is in, in stop or run mode.ENGLISHCode Function Unit---rdYrUnACCdECCLIdCbnStObrVar. State –State of the speed controller : indicates a fault or the motor operating phase :rdY = speed controller ready,rUn = motor in steady state or run command present and zero reference,ACC = accelerating,dEC = decelerating,CLI = current limit,dCb = injection braking,nSt = freewheel stop control,Obr = braking by adapting the deceleration ramp (see the “drive” menu).FrH Freq. Ref. HzFrequency referencerFr Output Freq. HzOutput frequency applied to the motorSPd Motor Speed rpmMotor speed estimated by the speed controllerLCr MotorCurrent AMotor currentUSP Mach. speed –Machine speed estimated by the speed controller. This is proportional to rFr, according to acoefficient USC which can be regulated in the adjust menu. Displays a value corresponding to theapplication (metres / second, for example). Caution, if USP becomes greater than 9999 the displayisdivided by 1000.OPr Output power %Power supplied by the motor, estimated by the controller.100 % corresponds to nominal power.ULn MainsVoltage VLine voltagetHr MotorThermal %Thermal state : 100% corresponds to the nominal thermal state of the motor. Above 118%, thespeed controller triggers an OLF fault (motor overload)tHd DriveThermal %Thermal state of the speed controller : 100% corresponds to the nominal thermal state of the speedcontroller. Above 118%, the speed controller triggers an OHF fault (speed controller overheating).It can be reset below 70 %.LFt Last Fault –Displays the last fault which occurred.74