Single Speed, Double Reduction Assembly ... - VEX Robotics
Single Speed, Double Reduction Assembly ... - VEX Robotics
Single Speed, Double Reduction Assembly ... - VEX Robotics

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
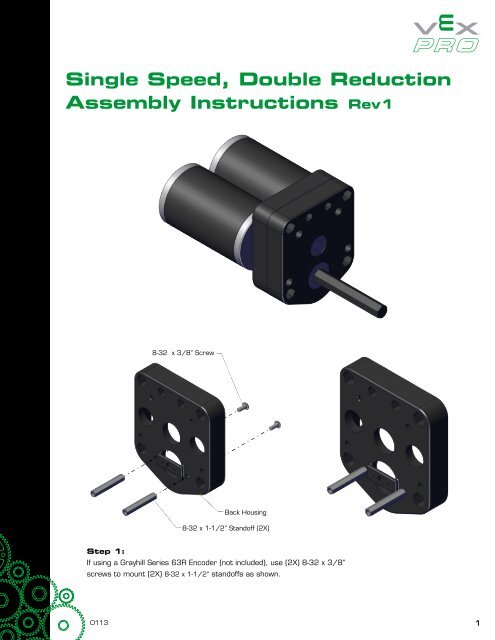
<strong>Single</strong> <strong>Speed</strong>, <strong>Double</strong> <strong>Reduction</strong> <strong>Assembly</strong> Instructions Rev1C-ClipOutput ShaftStep 2:Clip the C-Clip into the grove on the output shaft.Back Housing3/8” Round Bearing3/8” Cluster Shaft40 Tooth GearWith 3/8 HexRear Housing1/2” Round BearingStep 2Step 3:Insert 3/8” and 1/2” round bearings into the back housing. Install cluster shaft 40 tooth gearand output shaft as shown.2
<strong>Single</strong> <strong>Speed</strong>, <strong>Double</strong> <strong>Reduction</strong> <strong>Assembly</strong> Instructions Rev1US Digital E4P Encoder Base3-48 x 1/4” Screw (2X)Step 6 (US Digital E4P Encoder):Use the (2X) 3-48 x 1/4” screws included with the E4P encoder to mount the encoder base to therear housing as shown. Once the encoder base is mounted, follow US Digital’s instructions for furtherencoder assembly. Encoder is 1:1 with output.2mm KeyCIM Motor12 Tooth PinionRetaining Ring(2X)GapStep 7:Use a socket to press a retainer ring onto the shaft of a CIM motor. Push the ring to the back of thekeyway, but DO NOT allow it to contact the housing of the CIM motor. The “teeth“ of the retaining ringshould point away from the motor. Insert a 2mm key into the keyway of the CIM motor and slide the 12tooth pinion gear on. Retain the pinion gear with a second retaining ring as shown. Repeat for a total of(2X) motors.5
<strong>Single</strong> <strong>Speed</strong>, <strong>Double</strong> <strong>Reduction</strong> <strong>Assembly</strong> Instructions Rev1Step 7 (2X)10-32 x 1/2”Screw (4X)Step 8:Use (4X) 10-32 x 1/2” screws to mount (2X) motor assemblies from Step 7.6