2. Time-Domain Representations of LTI Systems
2. Time-Domain Representations of LTI Systems
2. Time-Domain Representations of LTI Systems

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
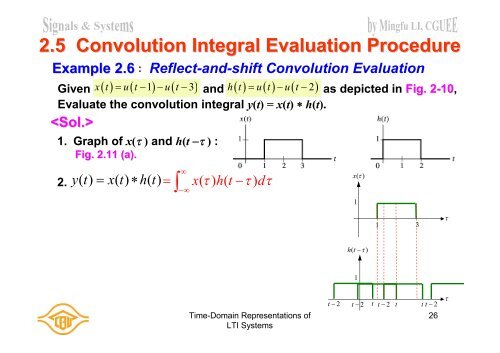
<strong>2.</strong>5 Convolution Integral Evaluation ProcedureExample <strong>2.</strong>6: Reflect-and-shift Convolution EvaluationGiven x t u t 1 ut3 h t u t u t2Evaluate the convolution integral y(t) = x(t) h(t).1. Graph <strong>of</strong> x() and h(t ) :Fig. <strong>2.</strong>11 (a).and as depicted in Fig. 2-10210,<strong>2.</strong> y( t)x( t)h( t) x ( )h(t ) dx()11 3h( t )1<strong>Time</strong>-<strong>Domain</strong> <strong>Representations</strong> <strong>of</strong><strong>LTI</strong> <strong>Systems</strong>t 2t 2 t t 2 t t t 226