2. Time-Domain Representations of LTI Systems
2. Time-Domain Representations of LTI Systems
2. Time-Domain Representations of LTI Systems

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
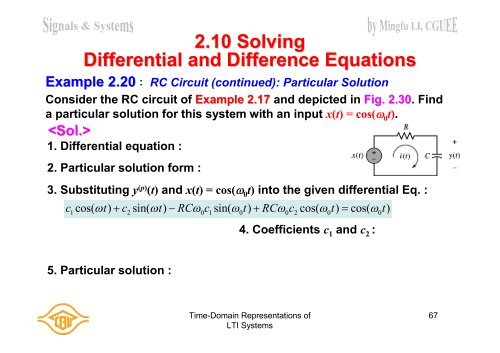
<strong>2.</strong>10 SolvingDifferential and Difference EquationsExample <strong>2.</strong>20: RC Circuit (continued): Particular SolutionConsider the RC circuit <strong>of</strong> Example <strong>2.</strong>17 and depicted in Fig. <strong>2.</strong>30. Finda particular solution for this system with an input x(t) = cos( 0 t).1. Differential equation :<strong>2.</strong> Particular solution form :3. Substituting y (p) (t) and x(t) = cos( 0 t) into the given differential Eq. :c cos( t ) c sin( t ) RC c sin( t) RC c cos( t) cos( t)1 2 0 1 0 0 2 0 04. Coefficients c 1 and c 2 :5. Particular solution :<strong>Time</strong>-<strong>Domain</strong> <strong>Representations</strong> <strong>of</strong><strong>LTI</strong> <strong>Systems</strong>67