2. Time-Domain Representations of LTI Systems
2. Time-Domain Representations of LTI Systems
2. Time-Domain Representations of LTI Systems

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
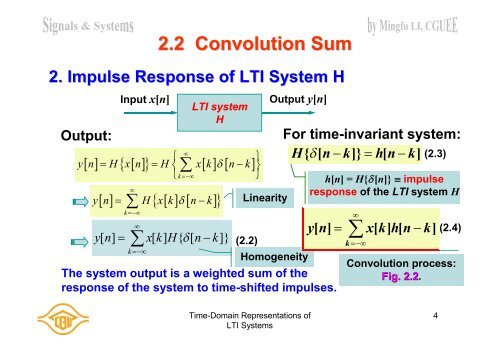
<strong>2.</strong> Impulse Response <strong>of</strong> <strong>LTI</strong> System HOutput:Input x[n]<strong>LTI</strong> systemHyn H x n H x k n kk y n H x k n kk k <strong>2.</strong>2 Convolution Sumy [ n] x[k]H{[n k]}Linearity(<strong>2.</strong>2)Output y[n]HomogeneityThe system output is a weighted sum <strong>of</strong> theresponse <strong>of</strong> the system to time-shifted impulses.For time-invariant system:H{ [n k]} h[ n k] (<strong>2.</strong>3)h[n] = H{[n]} impulseresponse <strong>of</strong> the <strong>LTI</strong> system Hk y [ n] x[k]h[n k](<strong>2.</strong>4)Convolution process:Fig. <strong>2.</strong><strong>2.</strong><strong>Time</strong>-<strong>Domain</strong> <strong>Representations</strong> <strong>of</strong><strong>LTI</strong> <strong>Systems</strong>4