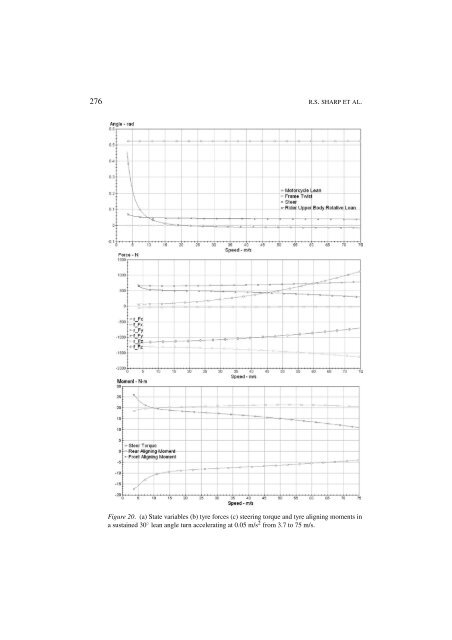
276 R.S. SHARP ET AL.Figure 20. (a) State variables (b) tyre forces (c) steer<strong>in</strong>g torque and tyre align<strong>in</strong>g moments <strong>in</strong>a susta<strong>in</strong>ed 30 ◦ lean angle turn accelerat<strong>in</strong>g at 0.05 m/s 2 from 3.7 to 75 m/s.
ADVANCES IN THE MODELLING OF MOTORCYCLE DYNAMICS 277The frame twist is imperceptibly small, despite its importance to <strong>the</strong> dynamics. Therider leans <strong>in</strong>to <strong>the</strong> turn to a moderate degree. The tyre loads and shear forces areshown, <strong>in</strong>dicat<strong>in</strong>g that <strong>the</strong> rear tyre will be near to its friction limits at <strong>the</strong> top end<strong>of</strong> <strong>the</strong> speed range covered. The steer torque required can be seen to be somewhatless than <strong>the</strong> front tyre align<strong>in</strong>g moment, all through <strong>the</strong> speed range. Predict<strong>in</strong>g <strong>the</strong>steer<strong>in</strong>g torque accurately apparently depends on modell<strong>in</strong>g <strong>the</strong> front tyre align<strong>in</strong>gmoment well. Close <strong>in</strong>spection <strong>of</strong> <strong>the</strong> motorcycle lean angle record shows that <strong>the</strong>reis some <strong>in</strong>teraction between <strong>the</strong> lean angle controller and <strong>the</strong> acceleration. The leanangle is not ma<strong>in</strong>ta<strong>in</strong>ed precisely on target and <strong>the</strong> greater <strong>the</strong> lean angle and <strong>the</strong>acceleration are, <strong>the</strong> larger <strong>the</strong> errors become. The simplest solution is to use verylow acceleration levels but <strong>the</strong> simulation runs <strong>the</strong>n take a long time to complete.If an unstable condition occurs dur<strong>in</strong>g a run, that run is lost, so that long runs arepotentially problematic.An alternative procedure has been developed. This <strong>in</strong>volves describ<strong>in</strong>g <strong>the</strong> speedtarget by a saturat<strong>in</strong>g ramp, so that true equilibrium is established at <strong>the</strong> f<strong>in</strong>ish <strong>of</strong> arun. A typical run will <strong>in</strong>crement <strong>the</strong> speed by 5 m/s only (less at low speed) and <strong>the</strong>f<strong>in</strong>al state <strong>of</strong> one run is used as <strong>the</strong> <strong>in</strong>itial state for <strong>the</strong> follow<strong>in</strong>g one. A whole series<strong>of</strong> runs constitutes <strong>the</strong> equilibrium data for one lean angle. From such a series for45 ◦ lean, contributions to <strong>the</strong> power dissipated, as functions <strong>of</strong> speed, are shown<strong>in</strong> Figure 21. It will be no surprise to see that most <strong>of</strong> <strong>the</strong> eng<strong>in</strong>e power is used toovercome aerodynamic drag, especially at high speeds, but it is not at all obviousthat each tyre’s align<strong>in</strong>g moment may dissipate 4 kW at high speed. Also, at highspeed, <strong>the</strong> rear tyre driv<strong>in</strong>g force accounts for a relatively high power dissipationthrough longitud<strong>in</strong>al slipp<strong>in</strong>g.Us<strong>in</strong>g a quasi-steady run at 15 ◦ lean, <strong>the</strong>n <strong>the</strong> results above for 30 ◦ and aga<strong>in</strong>correspond<strong>in</strong>g results for 45 ◦ for <strong>the</strong> trim state data used <strong>in</strong> <strong>the</strong> l<strong>in</strong>earization, <strong>the</strong> rootloci for <strong>the</strong> nom<strong>in</strong>al mach<strong>in</strong>e are shown <strong>in</strong> Figures 22–24. Each figure also conta<strong>in</strong>ssimilar results, similarly obta<strong>in</strong>ed, for <strong>the</strong> motorcycle with half <strong>the</strong> frame torsionalstiffness and 0.7071 times <strong>the</strong> frame damp<strong>in</strong>g coefficient. Damp<strong>in</strong>g <strong>of</strong> <strong>the</strong> oscillatorymodes improves with corner<strong>in</strong>g except that <strong>the</strong> medium speed wobble damp<strong>in</strong>gat 45 ◦ lean becomes quite small. In each case, it is clear that halv<strong>in</strong>g <strong>the</strong> framestiffness is detrimental to <strong>the</strong> stability properties. The more elaborate procedure forestablish<strong>in</strong>g steady-state equilibria yields root loci which are <strong>in</strong>dist<strong>in</strong>guishable fromthose shown; that is, <strong>the</strong> <strong>in</strong>fluence <strong>of</strong> <strong>the</strong> small acceleration employed is negligible<strong>in</strong> <strong>the</strong>se cases.If <strong>the</strong> corner<strong>in</strong>g motorcycle is excited by regular road undulations, <strong>the</strong> responseis potentially dangerous if resonance <strong>in</strong> connection with a lightly damped mode<strong>of</strong> oscillation occurs [30]. It was found <strong>in</strong> earlier work that about 15 ◦ lean islikely to represent a worst case, s<strong>in</strong>ce, for smaller angles, <strong>the</strong> road forc<strong>in</strong>g couplesonly weakly to <strong>the</strong> lateral oscillatory responses, while for larger angles, <strong>the</strong>modal damp<strong>in</strong>g is likely to <strong>in</strong>crease. Such a 15 ◦ lean case is illustrated, for aconstant speed <strong>of</strong> 65 m/s, <strong>in</strong> Figure 25. The plot shows <strong>the</strong> steer angle to road displacementforc<strong>in</strong>g frequency response ga<strong>in</strong> relative to 1 rad/m, account<strong>in</strong>g properly