a quaternion application to control rotation movements in ... - Univates
a quaternion application to control rotation movements in ... - Univates
a quaternion application to control rotation movements in ... - Univates

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
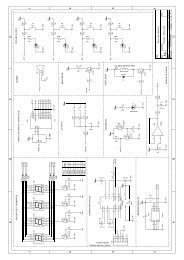
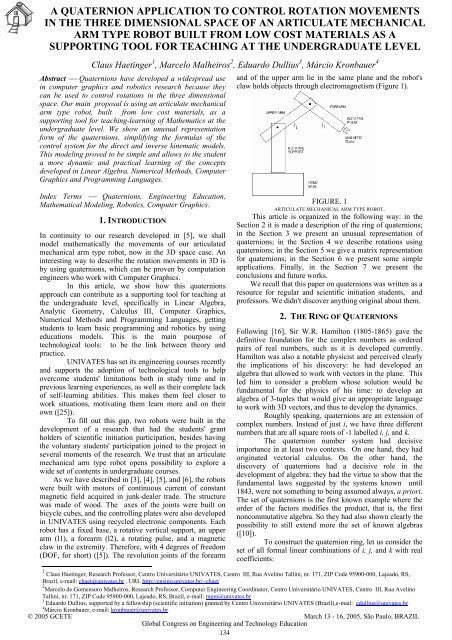
A QUATERNION APPLICATION TO CONTROL ROTATION MOVEMENTSIN THE THREE DIMENSIONAL SPACE OF AN ARTICULATE MECHANICALARM TYPE ROBOT BUILT FROM LOW COST MATERIALS AS ASUPPORTING TOOL FOR TEACHING AT THE UNDERGRADUATE LEVELClaus Haet<strong>in</strong>ger 1 , Marcelo Malheiros 2 , Eduardo Dullius 3 , Márcio Kronbauer 4Abstract ⎯ Quaternions have developed a widespread use<strong>in</strong> computer graphics and robotics research because theycan be used <strong>to</strong> <strong>control</strong> <strong>rotation</strong>s <strong>in</strong> the three dimensionalspace. Our ma<strong>in</strong> proposal is us<strong>in</strong>g an articulate mechanicalarm type robot, built from low cost materials, as asupport<strong>in</strong>g <strong>to</strong>ol for teach<strong>in</strong>g-learn<strong>in</strong>g of Mathematics at theundergraduate level. We show an unusual representationform of the <strong>quaternion</strong>s, simplify<strong>in</strong>g the formulas of the<strong>control</strong> system for the direct and <strong>in</strong>verse k<strong>in</strong>ematic models.This model<strong>in</strong>g proved <strong>to</strong> be simple and allows <strong>to</strong> the studenta more dynamic and practical learn<strong>in</strong>g of the conceptsdeveloped <strong>in</strong> L<strong>in</strong>ear Algebra, Numerical Methods, ComputerGraphics and Programm<strong>in</strong>g Languages.and of the upper arm lie <strong>in</strong> the same plane and the robot'sclaw holds objects through electromagnetism (Figure 1).Index Terms ⎯ Quaternions, Eng<strong>in</strong>eer<strong>in</strong>g Education,Mathematical Model<strong>in</strong>g, Robotics, Computer Graphics.1. INTRODUCTIONIn cont<strong>in</strong>uity <strong>to</strong> our research developed <strong>in</strong> [5], we shallmodel mathematically the <strong>movements</strong> of our articulatedmechanical arm type robot, now <strong>in</strong> the 3D space case. An<strong>in</strong>terest<strong>in</strong>g way <strong>to</strong> describe the <strong>rotation</strong> <strong>movements</strong> <strong>in</strong> 3D isby us<strong>in</strong>g <strong>quaternion</strong>s, which can be proven by computationeng<strong>in</strong>eers who work with Computer Graphics.In this article, we show how this <strong>quaternion</strong>sapproach can contribute as a support<strong>in</strong>g <strong>to</strong>ol for teach<strong>in</strong>g atthe undergraduate level, specifically <strong>in</strong> L<strong>in</strong>ear Algebra,Analytic Geometry, Calculus III, Computer Graphics,Numerical Methods and Programm<strong>in</strong>g Languages, gett<strong>in</strong>gstudents <strong>to</strong> learn basic programm<strong>in</strong>g and robotics by us<strong>in</strong>geducations models. This is the ma<strong>in</strong> pourpose oftechnological <strong>to</strong>ols: <strong>to</strong> be the l<strong>in</strong>k between theory andpractice.UNIVATES has set its eng<strong>in</strong>eer<strong>in</strong>g courses recentlyand supports the adoption of technological <strong>to</strong>ols <strong>to</strong> helpovercome students' limitations both <strong>in</strong> study time and <strong>in</strong>previous learn<strong>in</strong>g experiences, as well as their complete lackof self-learn<strong>in</strong>g abilities. This makes them feel closer <strong>to</strong>work situations, motivat<strong>in</strong>g them learn more and on theirown ([25]).To fill out this gap, two robots were built <strong>in</strong> thedevelopment of a research that had the students' grantholders of scientific <strong>in</strong>itiation participation, besides hav<strong>in</strong>gthe voluntary students' participation jo<strong>in</strong>ed <strong>to</strong> the project <strong>in</strong>several moments of the research. We trust that an articulatemechanical arm type robot opens possibility <strong>to</strong> explore awide set of contents <strong>in</strong> undergraduate courses.As we have described <strong>in</strong> [3], [4], [5], and [6], the robotswere built with mo<strong>to</strong>rs of cont<strong>in</strong>uous current of constantmagnetic field acquired <strong>in</strong> junk-dealer trade. The structurewas made of wood. The axes of the jo<strong>in</strong>ts were built onbicycle cubes, and the <strong>control</strong>l<strong>in</strong>g plates were also developed<strong>in</strong> UNIVATES us<strong>in</strong>g recycled electronic components. Eachrobot has a fixed base, a rotative vertical support, an upperarm (l1), a forearm (l2), a rotat<strong>in</strong>g pulse, and a magneticclaw <strong>in</strong> the extremity. Therefore, with 4 degrees of freedom(DOF, for short) ([5]). The revolution jo<strong>in</strong>ts of the forearmFIGURE. 1ARTICULATE MECHANICAL ARM TYPE ROBOT.This article is organized <strong>in</strong> the follow<strong>in</strong>g way: <strong>in</strong> theSection 2 it is made a description of the r<strong>in</strong>g of <strong>quaternion</strong>s;<strong>in</strong> the Section 3 we present an unusual representation of<strong>quaternion</strong>s; <strong>in</strong> the Section 4 we describe <strong>rotation</strong>s us<strong>in</strong>g<strong>quaternion</strong>s; <strong>in</strong> the Section 5 we give a matrix representationfor <strong>quaternion</strong>s; <strong>in</strong> the Section 6 we present some simple<strong>application</strong>s. F<strong>in</strong>ally, <strong>in</strong> the Section 7 we present theconclusions and future works.We recall that this paper on <strong>quaternion</strong>s was written as aresource for regular and scientific <strong>in</strong>itiation students, andprofessors. We didn't discover anyth<strong>in</strong>g orig<strong>in</strong>al about them.2. THE RING OF QUATERNIONSFollow<strong>in</strong>g [16], Sir W.R. Hamil<strong>to</strong>n (1805-1865) gave thedef<strong>in</strong>itive foundation for the complex numbers as orderedpairs of real numbers, such as it is developed currently.Hamil<strong>to</strong>n was also a notable physicist and perceived clearlythe implications of his discovery: he had developed analgebra that allowed <strong>to</strong> work with vec<strong>to</strong>rs <strong>in</strong> the plane. Thisled him <strong>to</strong> consider a problem whose solution would befundamental for the physics of his time: <strong>to</strong> develop analgebra of 3-tuples that would give an appropriate language<strong>to</strong> work with 3D vec<strong>to</strong>rs, and thus <strong>to</strong> develop the dynamics.Roughly speak<strong>in</strong>g, <strong>quaternion</strong>s are an extension ofcomplex numbers. Instead of just i, we have three differentnumbers that are all square roots of -1 labelled i, j, and k.The <strong>quaternion</strong> number system had decisiveimportance <strong>in</strong> at least two contexts. On one hand, they hadorig<strong>in</strong>ated vec<strong>to</strong>rial calculus. On the other hand, thediscovery of <strong>quaternion</strong>s had a decisive role <strong>in</strong> thedevelopment of algebra: they had the virtue <strong>to</strong> show that thefundamental laws suggested by the systems known until1843, were not someth<strong>in</strong>g <strong>to</strong> be<strong>in</strong>g assumed always, a priori.The set of <strong>quaternion</strong>s is the first known example where theorder of the fac<strong>to</strong>rs modifies the product, that is, the firstnoncommutative algebra. So they had also shown clearly thepossibility <strong>to</strong> still extend more the set of known algebras([10]).To construct the <strong>quaternion</strong> r<strong>in</strong>g, let us consider theset of all formal l<strong>in</strong>ear comb<strong>in</strong>ations of i, j, and k with realcoefficients:1 Claus Haet<strong>in</strong>ger, Research Professor, Centro Universitário UNIVATES, Centro III, Rua Avel<strong>in</strong>o Tall<strong>in</strong>i, nr. 171, ZIP Code 95900-000, Lajeado, RS,Brazil, e-mail: chaet@univates.br , URL http://ens<strong>in</strong>o.univates.br/~chaet2 Marcelo de Gomensoro Malheiros, Research Professor, Computer Eng<strong>in</strong>eer<strong>in</strong>g Coord<strong>in</strong>a<strong>to</strong>r, Centro Universitário UNIVATES, Centro III, Rua Avel<strong>in</strong>oTall<strong>in</strong>i, nr. 171, ZIP Code 95900-000, Lajeado, RS, Brazil, e-mail: mgm@univates.br3 Eduardo Dullius, supported by a fellowship (scientific <strong>in</strong>itiation) granted by Centro Universitário UNIVATES (Brazil),e-mail: edullius@univates.br4 Márcio Kronbauer, e-mail: kronbauer@univates.br
H a bi cj dk a,b,c,d .Addition of two <strong>quaternion</strong>s is very straighforward: we justadd the coefficients. That is, if q 1a 1b 1i c 1j d 1k andq 2a 2b 2i c 2j d 2k,then the sum isq 1q 2a 1a 2b 1b 2i c 1c 2j d 1d 2k.Multiplication is somewhat more complicated. The productis def<strong>in</strong>ed by distributivity, assum<strong>in</strong>g that the coefficientscommute with the symbols i, j, and k, and that thesemultiply <strong>to</strong> each other accord<strong>in</strong>g <strong>to</strong> the follow<strong>in</strong>g rules:i 2 j 2 k 2 1 ,ij ji k , jk kj i , ki ik j.So the product of q 1 and q 2 isq 1 aa 2 v , v2a 2 v 2 .Quaternions of the form a,0 are normally denoted <strong>in</strong> theirreal number form – as a. If c is a scalar, then we willconsider c q c,0 a,v ca ,c v . It also allows us <strong>to</strong>simplify some expressions. For example, que <strong>in</strong>verse q 1 isgiven by q 1 a, v a 2 v 2 where v is the lenght ofv , namelly, v b 2 c 2 d 2 . F<strong>in</strong>ally, we def<strong>in</strong>e the lengthof q <strong>to</strong> be q a 2 v 2 .q 1q 2a 1a 2b 1b 2c 1c 2d 1d 2a 1b 2a 2b 1c 1d 2d 1c si4. REPRESENTATING ROTATIONS WITHa 1c 2a 2c 1d 1b 2b 1d 2j a 1d 2a 2d 1b 1c 2c 1b 2k .QUATERNIONSIt is easy <strong>to</strong> see that, with the operations def<strong>in</strong>edabove, the set H is a noncommutative associative r<strong>in</strong>g. We can use <strong>quaternion</strong> multiplication <strong>to</strong> perform a <strong>rotation</strong>Furthermore, H is a division r<strong>in</strong>g ([16]).about an arbitrary unit axis u by the angle θ. A unit vec<strong>to</strong>rdenotes here a vec<strong>to</strong>r with length 1. The <strong>quaternion</strong> that3. AN UNUSUAL REPRESENTATION OFQUATERNIONScomputes this <strong>rotation</strong> is q a,v , where a cos 2 andWe can represent a <strong>quaternion</strong> <strong>in</strong> several ways ([14], [17]): v us<strong>in</strong> 2. Note that q is a unit <strong>quaternion</strong>, therefore q 1• as a l<strong>in</strong>ear comb<strong>in</strong>ation of 1, i, j, and k;• as a vec<strong>to</strong>r of the four coefficients <strong>in</strong> this l<strong>in</strong>earis the conjugate of q.comb<strong>in</strong>ation;• or as a scalar for the coefficients of 1 and a vec<strong>to</strong>r for thecoefficients of the imag<strong>in</strong>ary terms.In this last form, the <strong>quaternion</strong> q a bi cj dk iswritten as a,v , where v is the 3D vec<strong>to</strong>rv b,c,d . This dramatically simplifies the opera<strong>to</strong>rformulas of addition and multiplication. We can rewrite theaddition formula for two <strong>quaternion</strong>s q 1a 1,v 1 andq 2a 2,v 2 as q 1q 2a 1a 2,v 1v 2 and the product formulaasq 1q 2a 1a 2v 1v 2,a 1v 2a 2v 1v 1v 2,us<strong>in</strong>g the standard vec<strong>to</strong>r products (<strong>in</strong>ner product and crossproduct) studied <strong>in</strong> L<strong>in</strong>ear Algebra and Analytic Geometry.Recall that <strong>quaternion</strong> numbers of the forma,0 , where 0 0,0,0 , can be associated with the realnumbers, while the ones of the form a,v , wherev b,0,0 , can be associated with the complex numbers.The i, j, k representation for <strong>quaternion</strong>s can beshown <strong>to</strong> be identical with these formulas, however thisresults <strong>in</strong> even worse complexity for the division and <strong>in</strong>verseformulas. So the a,v representation, although unusual formathematicians, have become the preferred form byeng<strong>in</strong>eers that work with Computer Graphics and Robotics,as we will see with more details later.With this new representation, it is straightforward<strong>to</strong> develop a complete set of properties of the division r<strong>in</strong>gH. Given a <strong>quaternion</strong> number q a,v as above, wecan compute easily the additive <strong>in</strong>verse,q a, v , theWe will represent a po<strong>in</strong>t P <strong>in</strong> the 3D space by the<strong>quaternion</strong> p 0, P . The desired <strong>rotation</strong> of that po<strong>in</strong>t isgiven by this formula: P rotatedq p q 1 .Do <strong>quaternion</strong>s really perform 3D <strong>rotation</strong>s?Follow<strong>in</strong>g K. Shoemake, <strong>quaternion</strong> multiplicationspreserves norms, that is, N p q N p N q . This alsoimplies N q 1 N q 1 . Hence N q p q 1 N p . Thisproves that the map p q p q 1 is an orthogonal transform<strong>in</strong> 4D. On the other side, scalar multiplication commutes,so q a q 1 a . Thus p q p q 1 is an orthogonaltransform of the 3D vec<strong>to</strong>r of p. There is a cont<strong>in</strong>uous pathfrom the identity <strong>to</strong> every possible action. This excludesreflections, so the map p q p q 1 is a 3D <strong>rotation</strong>.Suppose now that we want <strong>to</strong> perform two <strong>rotation</strong>son the robot's claw. This may come up <strong>in</strong> a manipulation<strong>in</strong>terface where each movement adds another <strong>rotation</strong> <strong>to</strong> thecurrent claw position. Let q 1 and q 2 be two unit <strong>quaternion</strong>srepresentat<strong>in</strong>g two <strong>rotation</strong>s. We want <strong>to</strong> perform q 1 firstand then q 2. The composite <strong>rotation</strong> is then represent byq 2q 1rotatedq 2q 1p q 2q 11.Follow<strong>in</strong>g [11], the representation of a <strong>rotation</strong> as a<strong>quaternion</strong> (4 numbers) is more compact than therepresentation as an orthogonal matrix (9 numbers). Also,for a given axis and angle, one can easily construct thecorrespond<strong>in</strong>g <strong>quaternion</strong>, and conversely, for a given<strong>quaternion</strong> one can easily read off the axis and the angle.Both of these are much harder with matrices or Euler angles([23], [24]).In computer games and other <strong>application</strong>s, one isoften <strong>in</strong>terested <strong>in</strong> “smooth <strong>rotation</strong>s”, mean<strong>in</strong>g that the
scene should slowly rotate and not <strong>in</strong> a s<strong>in</strong>gle step. This canbe accomplished by choos<strong>in</strong>g a curve <strong>in</strong> the <strong>quaternion</strong>s,with one endpo<strong>in</strong>t be<strong>in</strong>g the identity transformation 1 andthe other be<strong>in</strong>g the <strong>in</strong>tended <strong>to</strong>tal <strong>rotation</strong>. This is moreproblematic with other representations of <strong>rotation</strong>s.When compos<strong>in</strong>g several <strong>rotation</strong>s on a computer,round<strong>in</strong>g errors necessarily accumulate. A <strong>quaternion</strong> that'sslightly off still represents a <strong>rotation</strong> - a matrix that's slightlyoff need not be orthogonal anymore and therefore need notrepresent a <strong>rotation</strong> at all. It is hard <strong>to</strong> turn such a matrixback <strong>in</strong><strong>to</strong> a proper orthogonal one.The orthogonal matrix correspond<strong>in</strong>g <strong>to</strong> a <strong>rotation</strong>by the unit <strong>quaternion</strong> q a bi cj dk is given by:a 2 b 2 c 2 d 2 2 bc 2ad 2 ac 2bd2 ad 2bc a 2 b 2 c 2 d 2 2 cd 2ab .2 bd 2ac 2 ab 2 cd a 2 b 2 c 2 d 25. REPRESENTATING QUATERNIONS BYMATRICESWe can also representate <strong>quaternion</strong>s by matrices ([10]):there are at least two ways of represent<strong>in</strong>g <strong>quaternion</strong>s asmatrices, <strong>in</strong> such a way that <strong>quaternion</strong> addition andmultiplication correspond <strong>to</strong> matrix addition and matrixmultiplication (i.e., <strong>quaternion</strong>-matrix homomorphisms).One is <strong>to</strong> use 2 2 complex number matrices, andthe other is <strong>to</strong> use 4 4 real number matrices.In the first way, the <strong>quaternion</strong> q a bi cj dk isa di b cirepresented as: .b ci a di This representation hasseveral nice properties:• All complex numbers correspond <strong>to</strong> matrices with onlyreal entries;• The square of the absolute value of a <strong>quaternion</strong> is thesame as the determ<strong>in</strong>ant of the correspond<strong>in</strong>g matrix;• The conjugate of a <strong>quaternion</strong> corresponds <strong>to</strong> theconjugate transpose of the matrix;• Restricted <strong>to</strong> unit <strong>quaternion</strong>s, this representationprovides the group isomorphism between the 3D-sphereS 3 and SU(2). The latter group is important <strong>in</strong> quantummechanics when deal<strong>in</strong>g with sp<strong>in</strong>.In the second way, the <strong>quaternion</strong> q as above isrepresented as:a b d cb a c d.d c a bc d b aIn this representation, the conjugate of a <strong>quaternion</strong>corresponds <strong>to</strong> the transpose of the matrix.6. APPLICATIONSQuaternions are often used <strong>in</strong> Computer Graphics (andassociated Geometric Analysis) <strong>to</strong> represent <strong>rotation</strong>s andorientations of objects <strong>in</strong> 3D space. They are smaller thanother representations such as matrices, and operations onthem such as composition can be computed more efficiently.Quaternions also see use <strong>in</strong> Control Theory, SignalProcess<strong>in</strong>g, Attitude Control, Pphysics, and OrbitalMechanics, ma<strong>in</strong>ly for represent<strong>in</strong>g <strong>rotation</strong>s/orientations <strong>in</strong>three dimensions. For example, it is common for spacecraftattitude-<strong>control</strong> systems <strong>to</strong> be commanded <strong>in</strong> terms of<strong>quaternion</strong>s, which are also used <strong>to</strong> telemeter their currentattitude. The rationale is that comb<strong>in</strong><strong>in</strong>g many <strong>quaternion</strong>transformations is more numerically stable than comb<strong>in</strong><strong>in</strong>gmany matrix transformations.This Section is dedicated <strong>to</strong> present a list of somesimple <strong>application</strong>s of <strong>quaternion</strong>s <strong>in</strong> Computer Graphics.• Us<strong>in</strong>g <strong>quaternion</strong>s <strong>to</strong> perform l<strong>in</strong>ear <strong>in</strong>terpolationbetween matrices ([13], Q61):For many animation <strong>application</strong>s, it is necessary <strong>to</strong><strong>in</strong>terpolate between two <strong>rotation</strong> positions of a given object.These positions may have been specified us<strong>in</strong>g keyframeanimation or <strong>in</strong>verse k<strong>in</strong>ematics.• Us<strong>in</strong>g <strong>quaternion</strong>s <strong>to</strong> perform cubic <strong>in</strong>terpolationbetween matrices ([13], Q62):For some <strong>application</strong>s, it may not be convenient orpossible <strong>to</strong> use l<strong>in</strong>ear <strong>in</strong>terpolation for animation purposes.In this case, cubic <strong>in</strong>terpolation is another alternative. Inorder <strong>to</strong> use cubic <strong>in</strong>terpolation, at least four <strong>rotation</strong>matrices must be known. Each of these is then converted<strong>in</strong><strong>to</strong> a set of spherical <strong>rotation</strong>s via <strong>quaternion</strong>s and spherical<strong>rotation</strong> angles (ie. longitude, latitude and <strong>rotation</strong> angle).These are then multiplied with the base matrix for a Card<strong>in</strong>alspl<strong>in</strong>e curve. This <strong>in</strong>terpolation matrix can then be used <strong>to</strong>determ<strong>in</strong>e the <strong>in</strong>termediate spherical <strong>rotation</strong> angles. Oncethe <strong>in</strong>terpolated coord<strong>in</strong>ates are known (latitude, longitudeand <strong>rotation</strong> angle), the <strong>in</strong>terpolated <strong>rotation</strong> matrix can thenbe generated through the conversion <strong>to</strong> <strong>quaternion</strong>s.• Us<strong>in</strong>g <strong>quaternion</strong>s <strong>to</strong> rotate a vec<strong>to</strong>r ([13], Q63):A rather elegant way <strong>to</strong> rotate a vec<strong>to</strong>r us<strong>in</strong>g a<strong>quaternion</strong> directly is the follow<strong>in</strong>g:v rotq rotv q1rot, where q rot is the <strong>rotation</strong> <strong>quaternion</strong>. Thiscan easily be realised and is most likely faster then thetransformation us<strong>in</strong>g a <strong>rotation</strong> matrix.More <strong>application</strong>s can be obta<strong>in</strong>ed <strong>in</strong> [7], [8], [9], and[12].7. CONCLUSIONS AND FUTURE ACTIVITIESWith these representations, we can describe the k<strong>in</strong>ematicsmodels of <strong>movements</strong> of our robot. In fact, recall<strong>in</strong>g that thek<strong>in</strong>ematics direct model consists of the description of theposition and of the orientations of the claw <strong>in</strong> function of thevariables of the l<strong>in</strong>ks, while the <strong>in</strong>verse ones consists of thedeterm<strong>in</strong>ation of the variables start<strong>in</strong>g from the position andthe orientation of the claw, we obta<strong>in</strong>ed a considerableprogress, s<strong>in</strong>ce <strong>in</strong> [5] we had just described these <strong>movements</strong><strong>in</strong> the bidimensional case.The robots' use <strong>in</strong> our classes has showed for theundergraduate eng<strong>in</strong>eer<strong>in</strong>g students more clearly the<strong>application</strong>s of some <strong>in</strong>digestible <strong>to</strong>pics of mathematics such
as <strong>in</strong>ner product, vec<strong>to</strong>r product, l<strong>in</strong>ear systems and complexnumbers. Besides, we have been able <strong>to</strong> relate first yeardiscipl<strong>in</strong>es with more advanced ones, such as NumericalMethods, Computer Graphics, and Programm<strong>in</strong>g Languages,allow<strong>in</strong>g <strong>to</strong> the student an early contact with the technology.However, the use of technology doesn't <strong>in</strong>validate theregular theorical classes, especially <strong>in</strong> the mathematicalones. Such traditional theoretical classes are very important<strong>to</strong>o, and we should not imag<strong>in</strong>e that the use of thetechnology should simply substitute them. The theory is<strong>in</strong>dispensable so that the student gets <strong>to</strong> relate the contentswith the practical <strong>application</strong>s.As a future work we will study systems of nonl<strong>in</strong>earequations of several variables, us<strong>in</strong>g Gröbner Bases <strong>to</strong>determ<strong>in</strong>e the position of the robot's claw <strong>in</strong> any po<strong>in</strong>t ofyour path, as well as the dynamic models of <strong>movements</strong>.REFERENCES[1] Fu, K. S.; Gonzalez, R. C.; Lee, C. S. G.; Robotics: <strong>control</strong>,cens<strong>in</strong>g, vision and <strong>in</strong>telligence, McGraw Hill, 1987.[2] Haet<strong>in</strong>ger, C., Grupo de estudos no uso de aplicativosmatemáticos computacionais de baixo cus<strong>to</strong> no ens<strong>in</strong>o da graduação,Lajeado-RS, UNIVATES, PROPEX, 2002 (unpublished).[3] Haet<strong>in</strong>ger, C.; Modelagem, descrição e geração de trajetóriasideais para o braço mecânico através da Álgebra L<strong>in</strong>ear, Lajeado-RS,UNIVATES, PROPEX, 2004 (unpublished).[4] Haet<strong>in</strong>ger, C.; Haet<strong>in</strong>ger, W.; Robótica em sala de aula:modelagem, descrição e geração de trajetórias ideais para o braçomecânico – o caso bidimensional, Florianópolis-SC, I EncontroRegional de Matemática Aplicada e Computacional de SantaCatar<strong>in</strong>a (I ERMAC-SC), 2003 (<strong>to</strong> appear).[5] Haet<strong>in</strong>ger, C. Haet<strong>in</strong>ger, W.; Dullius, E.; Marcol<strong>in</strong>, D.; Schmidt,J.; Ohse, M.; Kle<strong>in</strong>, N.; The use os an articulate mechanical arm typerobot built from materials of low cost as a support<strong>in</strong>g <strong>to</strong>ols forteach<strong>in</strong>g at the undergraduate level: the resolution of the direct and<strong>in</strong>verse k<strong>in</strong>ematic models <strong>in</strong> the bidimensional case, São Paulo,Proceed<strong>in</strong>gs of the World Congress on Eng<strong>in</strong>eer<strong>in</strong>g and TechnologyEducation (WCETE), pp. 584-588, 2004.[6] Haet<strong>in</strong>ger, W.; Estudo e fabricação de um braço mecânico<strong>control</strong>ado por computador utilizando componentes de baixo cus<strong>to</strong>,Lajeado-RS, UNIVATES, PROPEX, 2000 (unpublished).[7] http://citeseer.ist.psu.edu/176139.html[8] http://citeseer.ist.psu.edu/459592.html[9] http://citeseer.ist.psu.edu/hart93visualiz<strong>in</strong>g.html[10] http://en.wikipedia.org/wiki/Quaternions[11] http://en.wikipedia.org/wiki/Quaternions_and_spatial_<strong>rotation</strong>[12] http://ijr.sagepub.com/cgi/content/refs/22/6/419[13] http://www.j3d.org/matrix_faq/matrfaq_latest.html#Q61[14] Joy, K.I.; Quaternions, On-L<strong>in</strong>e Computer Graphics Notes,University of California, USA, pp. 1-6, 1999.[15] La<strong>to</strong>mbe, J.C.; Robot motion plann<strong>in</strong>g, Kluwer AcademicPublishers, 1991.[16] Milies, F.C.P.; Anéis com divisão: uma <strong>in</strong>trodução através dahistória, IMECC-UNICAMP, XVIII Brazilian Algebra Meet<strong>in</strong>g,2004.[17] Neddermeyer, I.W.; Quaternionen und Rotationen,Fachhochschule Gelsenkirchen, Germany, pp. 1-11, (prepr<strong>in</strong>t).[18] Ne<strong>to</strong>, F.D.M.; Pereira, F.R.; Modelagem na <strong>in</strong>dústria: umaviagem das ciências básicas à Engenharia, Belo Horizonte-MG, IBienal da SBM, Dep<strong>to</strong>. de Matemática –Icex/UFMG, 2002.[19] Pazos, F.; Au<strong>to</strong>mação de sistemas & robótica, São Paulo, AxcelBooks, 2002.[20] Salant, M.A.; Introdução à robótica, McGraw-Hill, São Paulo,1990.[21] Schnell, I.M.; Neddermeyer, I.W.; Denavit-Hartenberg-Matrizen, Fachhochschule Gelsenkirchen, Germany, pp. 1-9,(prepr<strong>in</strong>t).[22] Schnell, I.M.; Neddermeyer, I.W.; Differentielle Bewegung,Fachhochschule Gelsenkirchen, Germany, pp. 1-14, (prepr<strong>in</strong>t).[23] Schnell, I.M.; Neddermeyer, I.W.; Kartesische Position(Orientierungsdarstellung): RPY-Dastellung und Euler-W<strong>in</strong>kel,Fachhochschule Gelsenkirchen, Germany, pp. 1-10, (prepr<strong>in</strong>t).[24] Schnell, I.M.; Neddermeyer, I.W.; Koord<strong>in</strong>atentransformation,Fachhochschule Gelsenkirchen, Germany, pp. 26-85, (prepr<strong>in</strong>t).[25] Shaeffer, R.D.; Technology as a motivational <strong>to</strong>ol fordevelop<strong>in</strong>g self learn<strong>in</strong>g abilities, (<strong>to</strong> appear)