Setup of a Drift Tube Muon Tracker and Calibration of Muon ...
Setup of a Drift Tube Muon Tracker and Calibration of Muon ...
Setup of a Drift Tube Muon Tracker and Calibration of Muon ...

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
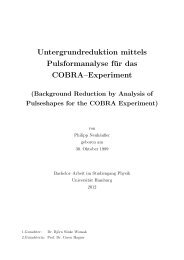
Zenith Angle CMT <strong>and</strong> BX-GL Tracks h_theta_glEntries 12535Mean 1.411RMS 8.752302 χ / ndf 18.3 / 15norm 290.2 ± 29.5mean 1.1 ± 0.425σ 4.008 ± 0.407N per 3°N per 6°Azimuth Angle CMT <strong>and</strong> BX-GL Tracks h_phi_glEntries 12525Mean -1.72320RMS 26.12χ 2 / ndf 31.46 / 19norm 393.2 ± 48.6mean 0.9893 ± 1.2160σ 9.035 ± 1.4652015151051050-40 -30 -20 -10 0 10 20 30 40∆θ [°]0-80 -60 -40 -20 0 20 40 60 80∆ϕ [°]Figure 5.20: Comparison <strong>of</strong> reconstructed polar <strong>and</strong> azimuth angles for the CMT<strong>and</strong> Borexino global tracking.collected CMT data has been compared to all three tracking methods. Since theCMT resolution exceeds the Borexino resolution by far, the CMT track coordinatesare considered to be the true track coordinates. Hence, the resolution <strong>of</strong> the Borexinotracking can be determined by a comparison.Due to the low trigger efficiency, only 392 common events <strong>of</strong> the CMT <strong>and</strong>Borexino remain. The event sample had to be reduced further. Some <strong>of</strong> the eventscome from multiple muon hits as depicted in Fig. 5.17, where a 3D reconstructioncannot be done without ambiguities. Therefore these events were not used in theanalysis. Also, many events are ignored due to the cut on the number <strong>of</strong> used hitsintroduced in Section 5.2.1. However, most <strong>of</strong> these events can be used once a bettercalibration is feasible. In addition to the reduction <strong>of</strong> events due to the CMT dataquality, not all events with a BX flag have an according reconstructed muon trackin Borexino. But although the overall statistics are rather poor they allow to do afirst comparison <strong>of</strong> the combined data.For the analysis, both the angular <strong>and</strong> lateral resolution have been determined.For each common event, track parameters like the polar angle θ <strong>and</strong> the azimuthangle ϕ were compared. Fig. 5.20 shows the distribution <strong>of</strong> ∆θ <strong>and</strong> ∆ϕ obtainedfrom the differences between the CMT <strong>and</strong> the Borexino global tracking. A clearpeak around 0 can be observed for both distributions. The peaks have been fitted bya Gaussian <strong>and</strong> the resulting σ gives a measure for the angular resolution. Results forall tracking algorithms are presented in Tab. 5.6. The values mostly range between3 <strong>and</strong> 9 degrees.Instead <strong>of</strong> looking at the polar <strong>and</strong> azimuth angles, one can also investigate theintermediate angle α between the tracks ⃗t i from the different reconstructions. It issimply given by⃗t bx ·⃗t cmt = |⃗t bx ||⃗t cmt |cos α⇔α = cos −1 (sin θ bx sin θ cmt (cos ϕ bx cos ϕ cmt + sin ϕ bx sin ϕ cmt ) + cos θ bx cos θ cmt ) .An exemplary plot for the distribution <strong>of</strong> intermediate angles between the CMT <strong>and</strong>Borexino global tracking is shown in Fig. 5.21. The values have been weighted by88