isolated current voltage transducers

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
Hall Effect Technologies<br />
t2 [min]<br />
34<br />
32<br />
30<br />
28<br />
26<br />
24<br />
22<br />
20<br />
18<br />
16<br />
14<br />
12<br />
10<br />
8<br />
6<br />
4<br />
2<br />
0<br />
I P<br />
=<br />
100 A<br />
I P<br />
= 75 A<br />
I P<br />
= 50 A<br />
I P<br />
= 40 A<br />
I P<br />
= 34 A<br />
0 30 60 90 120 150 180 210 240 270 300 330 360 390 420 450<br />
t1 [sec]<br />
Accuracy at 25 °C ±0.65 % of I PN<br />
±0.65 %<br />
Offset drift with temperature ±0.6 mA / 50 mA ±1.20 %<br />
Worst-case error (+85 °C) ±1.85 %<br />
The worst-case error when measuring a 50 A <strong>current</strong> is<br />
consequently equal to ±1.85 % • 50 A = ±0.93 A.<br />
When a 40 A <strong>current</strong> is measured the output <strong>current</strong> is 40 mA<br />
and the errors are:<br />
Accuracy at 25 °C ±0.65 % of I PN<br />
±0.81 %<br />
Offset drift with temperature ±0.6 mA / 40 mA ±1.50 %<br />
Worst-case error (+85 °C) ±2.31 %<br />
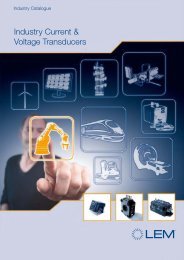
Figure 17: Overload diagram of the LTS 25-NP for a standby<br />
<strong>current</strong> of 0A<br />
The worst-case error when measuring a 40 A <strong>current</strong> is<br />
consequently equal to ±2.31 % • 40 A = ±0.93 A.<br />
t2 [sec]<br />
180<br />
170<br />
160<br />
150<br />
140<br />
130<br />
120<br />
110<br />
100<br />
90<br />
80<br />
70<br />
60<br />
50<br />
40<br />
I P<br />
=<br />
100 A<br />
I P<br />
= 75 A<br />
I P<br />
= 50 A<br />
I P<br />
= 40 A<br />
The errors when measuring lower <strong>current</strong>s are larger as a<br />
percentage of reading due to the offset <strong>current</strong>s becoming<br />
significantly larger with respect to the output signal <strong>current</strong>.<br />
The initial offset <strong>current</strong>, I O<br />
, of ±0.2 mA and the residual<br />
<strong>current</strong>, I OM<br />
, (magnetic offset) of ±0.3 mA after a <strong>current</strong><br />
overload, are also given in the data sheet. It shall be read as<br />
follows: When measuring a 0 A <strong>current</strong> the output can be<br />
±0.2 mA, or ±0.4 % of I PN<br />
= ±0.2 A. In addition, after<br />
experiencing an accidental 300 % overload (150 A) there<br />
can be an additional ±0.3 mA of offset for a total of ±0.5 mA,<br />
or 1.0 % of I PN<br />
= ±0.5 A.<br />
30<br />
20<br />
10<br />
I P<br />
= 34 A<br />
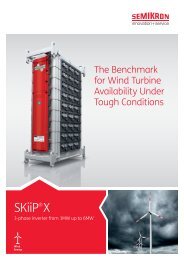
Current transducer LTS 25-NP (see datasheet)<br />
0<br />
0 5 10 15 20 25 30 35 40 45 50 55 60 65 70 75 80 85 90<br />
t1 [sec]<br />
Fig. 18 Overload diagram of the LTS 25-NP for a rest <strong>current</strong> of<br />
0 A, linear zone<br />
• the region at or near the nominal primary level, which is<br />
characterized by the accuracy specification<br />
• the region between these two, characterized by the linearity<br />
specification<br />
• and the region near the limit of the measuring range, where<br />
saturation effects may begin<br />
Maximum error takes all factors into account using the worstcase<br />
parameters. Because of the statistical distribution of each<br />
parameter it is highly unlikely that all will be at worst-case<br />
values in a single device. Nonetheless, this is the basis of<br />
worst-case design analysis.<br />
Current transducer LA 55-P (see datasheet)<br />
In this example, a DC <strong>current</strong> is measured with the LA 55-P<br />
<strong>current</strong> transducer with a ±15 V supply.<br />
The datasheet provides the following information: I PN<br />
= 50 A,<br />
I SN<br />
= 50 mA, accuracy (@ 25 °C and ±15 V) is 0.65 % of I PN<br />
.<br />
The accuracy is breakdown in several parameters, including<br />
linearity < 0.15 %, offset error I O<br />
= 0.2 mA, and offset drift<br />
I OT<br />
= 0.6 mA for 25…85 °C.<br />
When a 50 A <strong>current</strong> is measured (one primary turn) the<br />
output <strong>current</strong> is 50 mA and the errors are:<br />
For the LTS 25-NP transducer, the accuracy at 25 °C is given<br />
as ±0.7 % of I PN<br />
. This breaks down as follows:<br />
Number of secondary turns<br />
Non-linearity<br />
Tolerance on R IM<br />
Worst-case error<br />
±0.1 % of I PN<br />
±0.1 % of I PN<br />
±0.5 % of I PN<br />
±0.7 % of I PN<br />
The internal measurement resistance, R IM<br />
, has a value of<br />
50 Ω and a thermal drift specified as 50 ppm/K. Considering a<br />
-10…85 °C temperature range, the maximum variation is<br />
±0.15 Ω and the corresponding error due to the R M<br />
drift is<br />
equal to 50 ppm/K • (85 - 25)°C = ±0.3 % of I PN<br />
.<br />
In addition, the <strong>voltage</strong> output of the LTS 25-NP transducer<br />
uses a 2.5V ‘reference <strong>voltage</strong>’ corresponding to a zero<br />
primary <strong>current</strong> (Fig. 1). The offset on this reference <strong>voltage</strong><br />
(given in the datasheet) is ±25 mV at 25 °C. Considering a<br />
-10…85 °C temperature range, the worst-case offset value<br />
goes up an additional 100 ppm/K • (85 - 25)°C = 0.6 % to a<br />
total of ±40 mV at 85 °C, corresponding to 1 % initial offset<br />
plus 0.6 % drift.<br />
Because a primary nominal <strong>current</strong> (I PN<br />
) generates an output<br />
<strong>voltage</strong> of 625 mV at 25 °C, the error introduced by the offset<br />
on the reference <strong>voltage</strong> is:<br />
• error due to the standard offset ±25 / 625 = ±4.0 % of I PN<br />
• maximum error due to the drift ±15 / 625 = ±2.4 % of I PN<br />
19